Устройство линейного асинхронного двигателя
Рейтинг 2.9/5 (81 голосов)
 Линейный двигатель является электрической машиной, принцип работы которой основан на использовании энергии бегущего магнитного поля. Основное преимущество таких двигателей состоит в отсутствии кинематических цепей для преобразования вращательного движения в линейное, что существенно упрощает конструкцию приводимого в движение механизма и повышает его КПД. Существует большое разнообразие линейных двигателей. В настоящее время больший интерес проявляется к асинхронным линейным двигателям как относительно простым по конструкции.
Линейный двигатель является электрической машиной, принцип работы которой основан на использовании энергии бегущего магнитного поля. Основное преимущество таких двигателей состоит в отсутствии кинематических цепей для преобразования вращательного движения в линейное, что существенно упрощает конструкцию приводимого в движение механизма и повышает его КПД. Существует большое разнообразие линейных двигателей. В настоящее время больший интерес проявляется к асинхронным линейным двигателям как относительно простым по конструкции.
Эти двигатели можно представить как разрезанную по образующей и развернутую в плоскость обычную асинхронную машину вращательного движения. Развернутый в плоскость статор асинхронного двигателя является первичным элементом, а развернутый ротор вторичным элементом линейного двигателя (рис. 1).
Стальной сердечник первичного элемента выполняется шихтованным, а в его пазах укладывается многофазная (обычно трехфазная) обмотка. Вторичный элемент выполняется с короткозамкнутой обмоткой, уложенной в пазы стального сердечника, или представляет собой сплошную токопроводящую пластину. Пластина изготовляется из меди, алюминия или ферромагнитной стали. При включении обмотки первичного элемента в многофазную сеть образуется магнитное поле, которое перемещается вдоль магнитопровода со скоростью
где τ — полюсное деление;
f1 — частота питающего напряжения.
При своем перемещении магнитное поле индуктирует во вторичном элементе машины ЭДС. Эта ЭДС вызывает токи, от взаимодействия которых с магнитным полем образуется механическая сила (тяговое усилие), стремящаяся сдвинуть элементы относительно друг друга.
В линейном двигателе в зависимости от его конструкции и назначения возможно относительное перемещение как первичного, так и вторичного элемента. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля
S = (v1 — v) / v1
где v — скорость движения элемента.
Номинальное скольжение линейного двигателя равно 2-6%.
На работу линейного двигателя оказывают существенное влияние краевые эффекты, возникающие из-за конечных размеров разомкнутых магнитопроводов элементов. Это приводит к ухудшению таких характеристик, как тяговое усилие, коэффициент мощности и КПД.
Линейные двигатели могут быть успешно применены на ленточных и тележечных конвейерах, в приводах эскалаторов и движущихся тротуаров, в металлорежущих и ткацких станках, где рабочие органы совершают возвратно-поступательное движение. Большие перспективы имеет применение линейных двигателей для транспорта. Основным преимуществом линейного двигателя в этом случае является
возможность получения высоких скоростей движения до 400-500 км/ч.
Электропривод с линейными двигателями
 Подавляющее большинство электродвигателей является электродвигателями вращательного движения. В то же время многие рабочие органы производственных машин должны по технологии своей работы осуществлять поступательное (например, конвейеры, транспортеры и др.) или возвратно-поступательное движение (механизмы подачи станков, манипуляторы, поршневые и другие машины).
Подавляющее большинство электродвигателей является электродвигателями вращательного движения. В то же время многие рабочие органы производственных машин должны по технологии своей работы осуществлять поступательное (например, конвейеры, транспортеры и др.) или возвратно-поступательное движение (механизмы подачи станков, манипуляторы, поршневые и другие машины).
Преобразование вращательного движения в поступательное осуществляется посредством специальных кинематических звеньев: винт-гайка, шарико-винтовая передача, шестерня-зубчатая рейка, кривошипно-шатунная передача и другие.
Естественным для конструкторов рабочих машин является желание использовать для привода рабочих органов, совершающих поступательное и возвратно-поступательное движение, двигателей, ротор которых движется линейно.
В настоящее время получают развитие электроприводы, использующие линейные асинхронные, вентильные и шаговые двигатели. Принципиально линейный двигатель любого типа может быть образован из двигателя вращательного движения путем линейной развертки цилиндрического статора в плоскость.
Представление об устройстве линейного асинхронного двигателя можно получить, если развернуть статор асинхронного двигателя в плоскость. При этом вектор намагничивающих сил статора будет линейно перемещаться вдоль развертки статора, т.е. при этом образуется не вращающееся (как в обычных двигателях), а бегущее электромагнитное поле статора.
В качестве вторичного элемента может использоваться ферромагнитная полоса, располагаемая с небольшим воздушным зазором вдоль развертки статора. Эта полоса играет роль короткозамкнутого ротора. Вторичный элемент увлекается движущимся полем статора и линейно перемещается со скоростью, меньшей скорости движения поля статора на величину линейного абсолютного скольжения.
Линейная скорость бегущего электромагнитного поля будет
где τ, м — полюсное деление — расстояние между соседними полюсами линейного асинхронного двигателя.
Скорость вторичного элемента

где sЛ — относительное линейное скольжение.
При питании двигателя напряжением стандартной частоты получаемые скорости поля будут достаточно велики (более 3 м/с), что затрудняет использование этих двигателей для привода промышленных механизмов. Такие двигатели применяются для высокоскоростных транспортных механизмов. Для получения более низких скоростей движения и регулирования скорости линейного асинхронного двигателя его обмотки питают от преобразователя частоты.
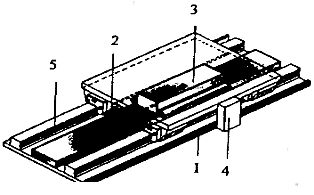
Рис. 1. Конструкция линейного однокоординатного двигателя.
Применяются несколько вариантов конструкций линейного асинхронного двигателя. Одна из них показана на рис. 1. Здесь вторичный элемент (2) — полоса, соединенный с рабочим органом, перемещается по направляющим 1 под действием бегущего электромагнитного поля, создаваемого статором 3. Такая конструкция удобна для компоновки с рабочей машинной, однако, она сопряжена со значительными потоками рассеяния поля статора, вследствие чего cosφ двигателя будет низким.
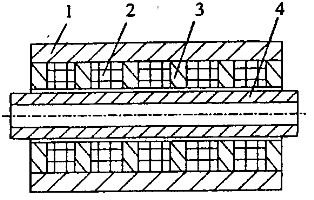
Рис.2. Линейный двигатель цилиндрической конструкции
Для увеличения электромагнитной связи между статором и вторичным элементом, последний размещают в прорезь между двумя статорами, либо конструкция двигателя выполняется в виде цилиндра (см. рис. 2). В этом случае статор двигателя представляет собой трубку (1), внутри которой расположены цилиндрические наборные катушки (2), являющиеся обмоткой статора. Между катушками размещены ферромагнитные шайбы 3, являющиеся частью магнитопровода. Вторичный элемент — шток трубчатой формы также выполнен из ферромагнитного материала.
Линейные асинхронные двигатели могут также иметь обращенную конструкцию, когда вторичный элемент неподвижен, а перемещается статор. Такие двигатели обычно применяются на транспортных средствах. В этом случае в качестве вторичного элемента используется рельс или специальная полоса, а статор размещается на подвижной тележке.
Недостатком линейных асинхронных двигателей является низкий к.п.д и связанные с этим потери энергии, прежде всего, во вторичном элементе (потери скольжения).
В последнее время кроме асинхронных начали применяться синхронные (вентильные) двигатели. Конструкция линейного двигателя такого типа аналогична представленной на рис. 1. Статор двигателя развернут в плоскость, а на вторичном элементе размещаются постоянные магниты. Возможен вариант обращенной конструкции, когда статор является подвижной частью, а вторичный элемент с постоянными магнитами неподвижен. Переключение обмоток статора производится в зависимости от относительного положения магнитов. С этой целью в конструкции предусмотрен датчик положения (4 — на рис. 1).
Для позиционных приводов эффективно применяются также линейные шаговые двигатели. Если развернуть в плоскость статор шагового двигателя, а вторичный элемент выполнить в виде пластины, на которой путем фрезерования канавок образованы зубцы, то при соответствующем переключении обмоток статора вторичный элемент будет совершать дискретное движение, шаг которого может быть весьма малым — до долей миллиметра. Часто применяется обращенная конструкция, в которой вторичный элемент неподвижен.
Скорость линейного шагового двигателя определяется величиной зубцового деления τ, числом фаз m и частотой переключения

Получение высоких скоростей движения не вызывает трудностей, поскольку увеличение зубцового деления и частоты не лимитируется технологическими факторами. Ограничения существуют для минимального значения τ, т.к. отношение зубцового деления к величине зазора между статором и вторичным элементом должно быть не меньше 10.

Использование дискретного привода позволяет не только упростить конструкцию механизмов, совершающих линейное однокоординатное движение, но и дает возможность с помощью одного привода получить двух или многокоординатное движение. Если на статоре подвижной части расположить ортогонально две системы обмоток, а во вторичном элементе выполнить канавки в двух перпендикулярных направлениях, то подвижный элемент будет совершать дискретное движение в двух координатах, т.е. обеспечивать перемещение на плоскости.
В этом случае возникает задача создания опоры для подвижного элемента. Для ее решения может использоваться воздушная подушка — напор воздуха, подаваемого в пространстве под подвижным элементам. Линейные шаговые двигатели развивают относительно низкое тяговое усилие и имеют низкий к.п.д. Основной областью их применения являются легкие манипуляторы, легкие сборочные станки, измерительные машины, станки для лазерной резки и другие устройства.
Линейные асинхронные двигатели
Подвижная часть линейного двигателя совершает поступательное движение, поэтому применение этих двигателей для привода рабочих машин с поступательным движением рабочего органа позволяет упростить кинематику механизмов, уменьшим потери в передачах и повысить надежность механизма в целом.
Возможны линейные двигатели четырех видов: электромагнитные (соленоидные), магнитоэлектрические (с применением постоянного магнита), электродинамические и асинхронных. Асинхронные (индукционные) линейные двигатели благодаря простоте конструкции и высокой надежности получили наибольшее применение.
Для объяснения принципа работы линейного асинхронного двигателя обратимся к асинхронному двигателю с вращательным движением ротора. Если статор этого двигателя (рис. 17.10, а) мысленно «разрезать» и «развернуть» так, чтобы он образовал дугу с углом α (рис. 17.10, б), то диаметр ротора увеличится. При этом мы получим асинхронный двигатель с дуговым статором Частота вращения (об/мин) магнитного поля статора этого двигателя (синхронная частота)
где n 0 1 — синхронная частота вращения обычного (до «разрезания») асинхронного двигателя, об/мин; α — угол дуги статора, рад.
Из (17.6) следует, что, изменяя угол α, можно получить дуговой асинхронный двигатель на любую синхронную частоту меньше частоты вращения n 0 1. Дуговые двигатели применяют для безредукторного привода устройств, требующих небольших частот вращения, исключив применение сложного и трудоемкого редуктора.
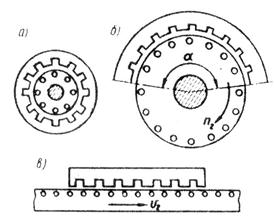
Рис. 17.10. К понятиям о дуговом и линейном двигателях
Если же «разрезанный» статор развернуть в плоскость, то получим асинхронный линейный двигатель (рис. 17.10, в). Принципиальное конструктивное отличие линейного асинхронного двигателя от асинхронного двигателя с вращательным движением ротора
состоит в том, что первичный элемент линейного двигателя (индуктор) создает не вращающееся, а бегущее магнитное поле и нижняя часть двигателя с короткозамкнутой обмоткой (или без нее) называемая вторичным элементом, перемещается вдоль своей оси. Скорость бегущего поля в линейном двигателе (м/с)
где f1 — частота тока в обмотке статора, Гц; τ — полюсное деление; Lc — длина статора (индуктора), м.
Принцип действия линейного асинхронного двигателя основан на том, что бегущее поле индуктора, сцепляясь с короткозамкнутой обмоткой вторичного элемента двигателя, наводит в ней ЭДС. Возникающие в стержнях этой обмотки токи взаимодействуют с бегущим полем индуктора и создают на индукторе и вторичном элементе электромагнитные силы, стремящиеся линейно переместить подвижную часть двигателя относительно неподвижной. В некоторых конструкциях линейных двигателей подвижной частью является индуктор, а в некоторых — вторичный элемент, называемый в этом случае бегунком. Если вторичный элемент линейного двигателя невозможно изготовить с короткозамкнутой обмоткой, то применяют вторичные элементы в виде полосы из меди, алюминия или ферромагнитной стали. Наиболее удовлетворительными получаются характеристики линейного двигателя при составном вторичном элементе, например выполненном в виде полосы из ферромагнитной стали, покрытой слоем меди.
Основной недостаток асинхронных двигателей с разомкнутым статором — дуговых и линейных — явление краевого эффекта, представляющего собой комплекс электромагнитных процессов, обусловленных разомкнутой конструкцией статора. К нежелательным последствиям краевого эффекта в первую очередь следует отнести появление «паразитных» тормозных усилий, направленных против движения подвижной части двигателя, и возникновение поперечных сил, стремящихся сместить подвижную часть двигателя в поперечном направлении. Кроме того, краевой эффект вызывает ряд других нежелательных явлений, ухудшающих рабочие характеристики линейных двигателей.
Линейные асинхронные двигатели применяют для привода заслонок, ленточных конвейеров, подъемно-транспортных механизмов. На рис. 17.11 показано устройство линейного асинхронного двигателя привода тележки подъемного крана. На тележке 3 расположен индуктор линейного двигателя, состоящий из шихтованного сердечника 6, в пазах которого расположена обмотка 5. Направляющая для колес 2 представляет собой стальную балку 7, к нижней части которой прикреплена стальная полоса 4. Бегущее магнитное поле индуктора наводит в стальной полосе 4 вихревые токи. Электромагнитные силы, возникающие в результате взаимодействия этих токов с магнитным полем индуктора, перемещают индуктор (тележку) вдоль стальной полосы 4.
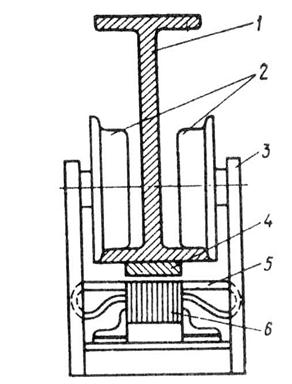
Рис. 17.11. Линейный асинхронный двигатель
привода тележки подъемного крана
Линейные асинхронные двигатели значительной мощности применяют на транспорте в качестве тяговых двигателей. Один из вариантов такого двигателя показан на рис. 17.12. Здесь индуктор 2 двигателя подвешен к транспортному средству 1, а стальная полоса 3 установлена вертикально на основании пути между рельсами. Из этой конструкции поперечная сила Fп вызванная краевым эффектом используется полезно, так как она уменьшает силу давления на несущие оси и колеса и, как следствие, уменьшает трение качения.

Рис 17.12. Линейный асинхронный двигатель
привода железнодорожного транспортного средства
Контрольные вопросы
1.В чем различие между схемами соединения индукционного регулятора напряжения и фазорегулятора?
2.Сколько раз напряжение на выходе ИР достигнет наибольшего значения за один оборот ротора, если обмотка имеет 2р = 6?
3.В каком направлении следует вращать ротор АПЧ, чтобы на выходе получить ЭДС частотой, большей частоты тока в сети?
4.Какую долю мощности на выходе АПЧ составит мощность приводного двигателя, если частота тока на входе АПЧ равна 50 Гц, а на выходе — 100 Гц?
5.Объясните работу сельсинов в индикаторной системе передачи. Чем вызвана ошибка в воспроизведении угла поворота?
6.Чем обеспечивается отсутствие самохода в асинхронном исполнительном двигателе?

7.Объясните принцип работы асинхронного линейного двигателя.
8.Что такое краевой эффект и каковы его нежелательные действия в линейном асинхронном двигателе?
ГЛАВА 18
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет