Управление бездатчиковыми бесколлекторными двигателями (Sensorless BLDC)
Существуют бесколлекторный двигатели без каких либо датчиков положения или энкодеров. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз подключен «+» к другой «-« питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора. Обычно определяют момент перехода напряжения на свободной фазе через нулевую точку (половину питающего напряжения). Т.е. нужно отследить момент, когда напряжение на свободной фазе сравняется со средней точкой. Разумеется, для работы этого метода двигатель должен вращаться. Этот метод хорошо работает при сравнительно высоких оборотах двигателя. При низких оборотах наводимая ЭДС может оказаться недостаточной для четкого определения положения ротора. Тем не менее, этот метод применяется. Один из методов определения положения ротора при невращающемся двигателе будет рассмотрен в следующей статье. Способы запуска беcколлекторного бездатчикового двигателя также будут рассматриваться в следующей статье.
Схема со средней точкой
Виртуальная средняя точка

Эта схема очень проста и применяется очень часто, но она имеет свои недостатки. Из за ШИМ напряжение средней точки не постоянно. Оно колеблется в широком диапазоне напряжений. Для того чтобы микроконтроллер смог измерить напряжение, применяются цепи согласования сигналов — делители напряжения и RC-фильтры для сглаживания колебаний.
Если Ваш двигатель питается напряжением 24 вольта, то в средней точке напряжение может находиться в пределах от 0 до 24 Вольт. Микроконтроллеры обычно имеют предел измерения 5 В. Без схем согласования уровней сигналов не обойтись. Учтите, что повысив напряжение питания двигателя, следует изменить и делители напряжения в цепях согласования. В противном случае напряжение может превысить допустимое и вывести со строя микроконтроллер. Для предотвращения таких ситуаций дополнительно применяют схемы защиты.
Присутствие делителя напряжения ведет к снижению чувствительности на малых оборотах двигателя, а наличие фильтров вносит задержку. Задержка является причиной погрешностей в определении положения ротора и может стать критичной для управления двигателями на высоких скоростях.
Поскольку схема с виртуальной средней точкой достаточно шумная, можно прибегнуть к другой схеме, где стабильное напряжение средней точки устанавливается отдельно и зависит от питающего напряжения.
В литературе встречались упоминания о схемах, которые используют измерение третьей гармоники статора. Также есть упоминание о применение высокочастотного сигнала для определения положения ротора. Однако более подробной информации об этом методе сообщить не могу.
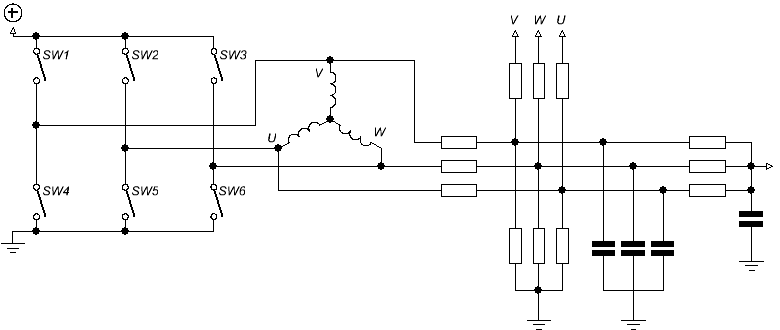
Мы будем рассматривать простую схему, в которой стабильное напряжение средней точки устанавливается отдельно.
Алгоритм коммутаций
На первом этапе P1 на фазу V подается «+», минус — на фазу U. При этом напряжение на фазе W начинает расти и в середине периода P1 пересекает нулевую точку — половину напряжения между фазами V и U, т.е. половину питающего напряжения. Как видно из диаграммы, изменение состояния ключей нужно выполнить на половине периода между событием пересечения нулевой точки (ZC). После переключения состояния ключей (этап P2) измерения выполняем на свободной фазе V. Обратите внимание на то, что напряжение на свободной фазе может расти или падать. Это придется учитывать при работе компараторов. Таким образом, наш регулятор должен помнить на каком шаге от P1 до P6 находится, и переходить к следующему состоянию, исходя из расчетов времени, вычисленных между событиями ZC.
Ниже приведена таблица соответствия состояния ключей и свободных фаз для каждого из 6 положений ротора:
| Этап | Питание + | Питание — | Открытые ключи | Измерения на фазе |
| P1 | V | U | SW1, SW5 | W↑ |
| P2 | W | U | SW3, SW5 | V↓ |
| P3 | W | V | SW3, SW4 | U↑ |
| P4 | U | V | SW2, SW4 | W↓ |
| P5 | U | W | SW2, SW6 | V↑ |
| P6 | V | W | SW1, SW6 | U↓ |
Итак, нам понадобится подсчитывать время между ZC. И отмерять время от события ZC до переключения ключей. Это время должно учитывать угол опережения фазы.
Выбор частоты ШИМ
Предположим ситуацию, когда, частота ШИМ 8 кГц, скважность 100% (полный газ), двигатель вращается со скоростью, при которой частота коммутаций тоже равняется 8 кГц. Т.е. от момента переключения ключей до следующего переключения проходит ровно один период ШИМ сигнала. Если скорость вращения возрастёт и частота коммутаций превысит частоту ШИМ, возникнет ситуация, при которой ШИМ сигнал будет удерживать ключи открытыми дольше необходимого и противодействовать вращению двигателя. Кроме того, измерение напряжения на свободной фазе синхронизированы частотой ШИМ сигнала, поэтому нет технической возможности вычислить скорость коммутации выше частоты ШИМ. Другими словами контролер теоретически не сможет управлять двигателем, если тот вращается со скоростью, при которой частота коммутаций превышает частоту ШИМ сигнала. Это только теоретические расчеты. На практике, желательно чтобы частота ШИМ в несколько раз превышала частоту коммутаций.
Например, имеем регулятор с частотой ШИМ 8 кГц, и двигатель с 14 магнитами. Максимальная теоретически возможная частота вращения вала двигателя будет:
V=(Q/6/(N/2)*60);
Q — частота ШИМ в герцах 6 — количество коммутаций за один электрический оборот N — количество магнитов 60 — количество секунд в минуте
V=((8000/6/(14/2))*60) = 11428 об/мин.
Двигатель с 28 магнитами: V=((8000/6/(28/2))*60) = 5714 об/мин.
Т.е. если вам нужно управлять многополюсным двигателем на высоких оборотах, придется использовать регулятор с более высокой частотой ШИМ.
Например, чтобы раскрутить двигатель с 24 магнитами до 10000 об/мин понадобится регулятор с частотой ШИМ не ниже 24кГц. Нужно так же помнить, что чем выше частота ШИМ, тем больше переходных процессов происходит на ключах за единицу времени. Это может привести к увеличению потерь и к увеличению тепловыделения на ключах.
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
Общее устройство (Inrunner, Outrunner)
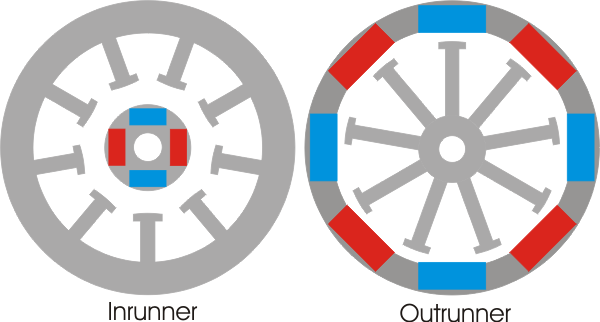
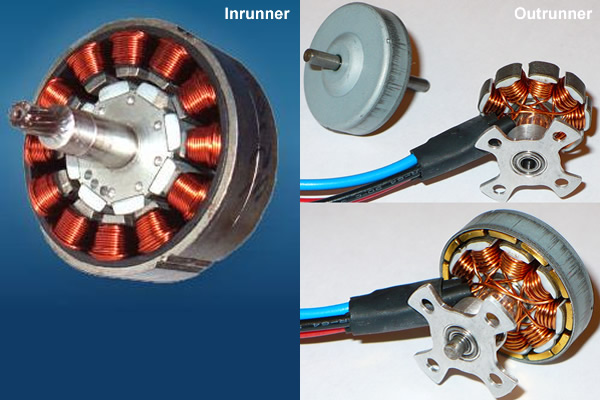
Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.

Магниты и полюса
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья

Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
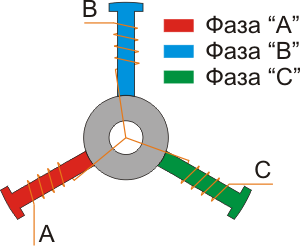
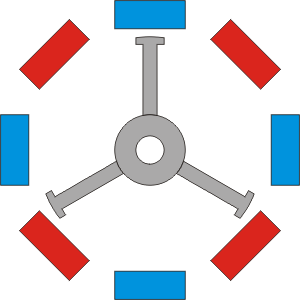
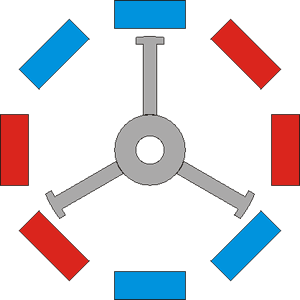
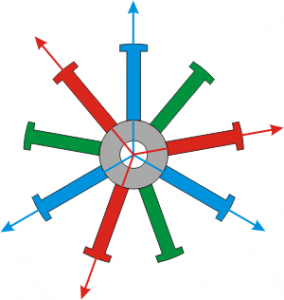
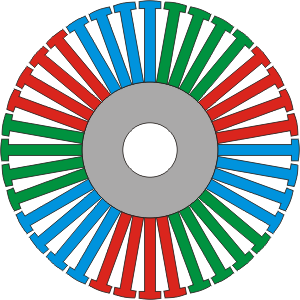
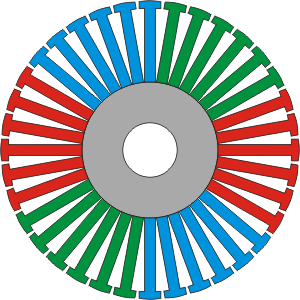
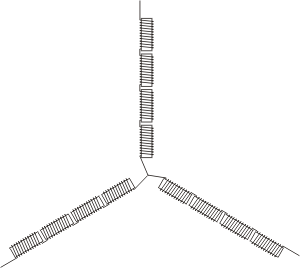
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
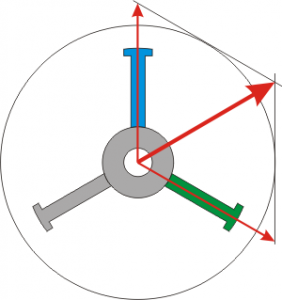
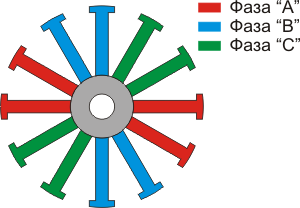
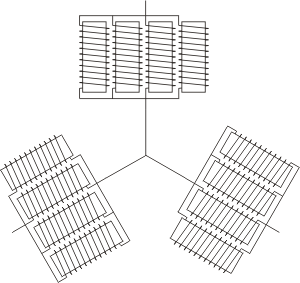
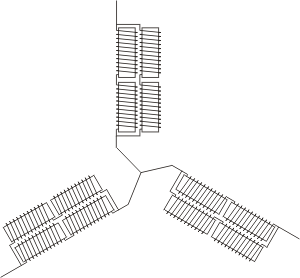
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.
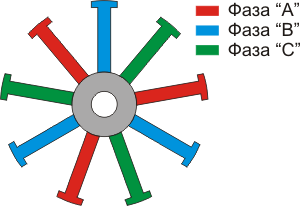
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
 Вариант обмотки на 12 зубов
Вариант обмотки на 12 зубов
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
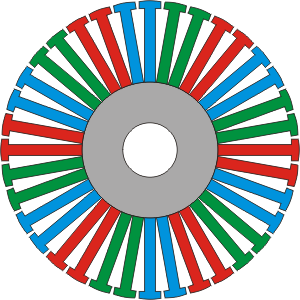 6 групп по 2 зуба
6 групп по 2 зуба
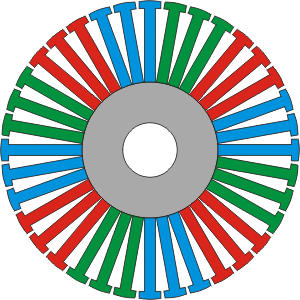 4 группы по 3 зуба
4 группы по 3 зуба
 3 группы по 4 зуба
3 группы по 4 зуба
 2 группы по 6 зубьев
2 группы по 6 зубьев
Наиболее предпочтительна схема 6 групп по 2 зуба.
Существует двигатель с 51 зубом на статоре! 17 зубов на одну фазу. 17 — это простое число, оно нацело делится только на 1 и на само себя. Как же распределить обмотку по зубьям? Увы, но я не смог найти в литературе примеров и методик, которые помогли бы решить эту задачу. Оказалось, что обмотка распределялась следующим образом:
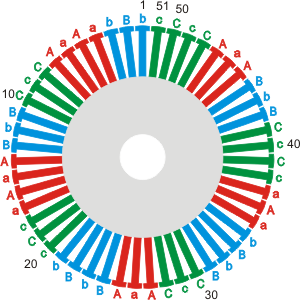
Рассмотрим реальную схему обмотки.
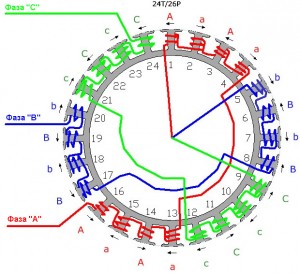
Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.
Обмотки зубьев могут соединяться и параллельно.
Так же могут быть комбинированные включения
Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
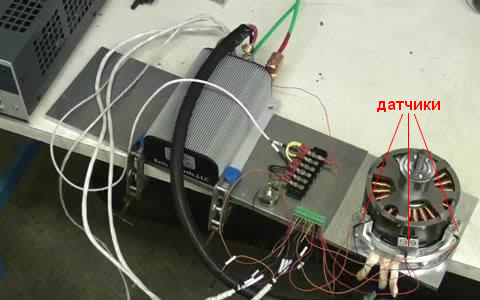
Датчики положения
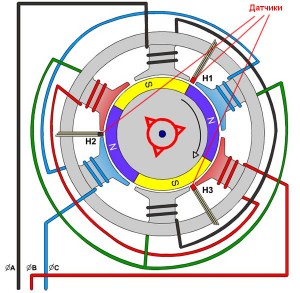
Имеется в виду «электрических» градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:

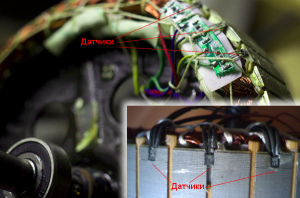
Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.
На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
Звезда и Треугольник
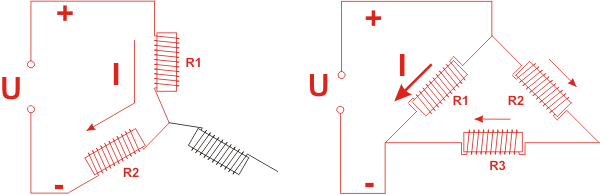
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.