Чем асинхронные двигатели отличаются от синхронных
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. Электродвигателем называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это постоянные магниты. Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
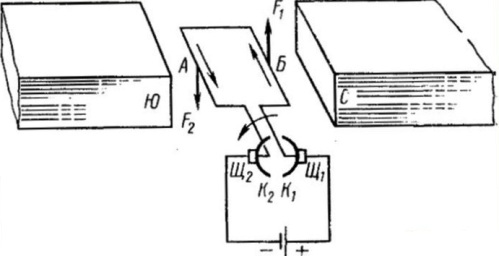
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
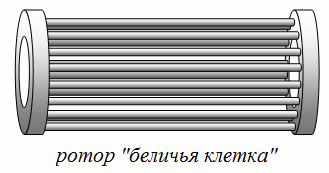
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.

Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, — все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения. По сравнению с асинхронными двигателями они имеют ряд преимуществ:
более высокий коэффициент полезного действия;
возможность изготовления двигателей с низкой частотой вращения, что позволяет отказаться от промежуточных передач между двигателем и рабочей машиной;
частота вращения двигателя не зависит от нагрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться потребителями и генераторами реактивной мощности. Характер и значение реактивной мощности синхронного двигателя зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его косинус фи равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
Асинхронный двигатель принцип работы
Среди разнообразия выпускаемых на сегодняшний день типов электрических моторов большое распространение получили асинхронные двигатели. Их мощность и эффективность обеспечивает использование в деревообрабатывающей и металлообрабатывающей промышленности, в насосных агрегатах, на фабриках, в станках и ручном электрическом инструменте.
Асинхронный двигатель: что это
Асинхронный двигатель – это асинхронная электрическая машина, применяемая для преобразования электрической энергии в механическую. Асинхронный дословно означает неодновременный – здесь имеется в виду, что у асинхронного двигателя магнитное поле всегда имеет большую частоту вращения, чем ротор, который словно пытается его догнать. Работают эти машины от сетей с переменным током.
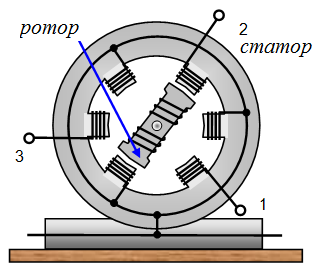
Любой асинхронный двигатель состоит из двух ключевых составляющих: ротора и статора. Эти части не контактируют между собой и отделены друг от друга воздушным зазором, в котором формируется подвижное магнитное поле.
Статор асинхронной машины состоит из следующих частей:
- Корпус. Служит для скрепления всех деталей мотора. Для двигателей небольшого размера, как правило, используют цельные литые корпусы из чугуна, стальных и алюминиевых сплавов.
- Сердечник или магнитопроводник. Собирается из пластин, для изготовления которых применяют специальную электрическую сталь. Запрессовывается в корпус и улучшает магнитно-индукционные качества машины. Каждая пластина сердечника покрывается особым лаком, позволяющим уменьшить потери при возникновении вихревых токов. В некоторых случаях устройство асинхронного двигателя предусматривает установку корпуса-сердечника, совмещающего в себе обе функции.
- Обмотки. Устанавливаются в пазы сердечника. Представляет собой три катушки из меднопроволочных секций, расположенные под углом в 120˚ относительно друг друга. Называется первичной, потому что подключается к сети напрямую.
Конструкция ротора состоит из основного блока с вентиляционной крыльчаткой, опирающегося на подшипники. Связь ротора с приводимым в движение механизмом обеспечивается с помощью прямого подключения, редукторов или других способов передачи механической энергии. В асинхронных двигателях используются два вида роторов:
- Массивный ротор – единая схема из прочного ферромагнитного соединения. Внутри неё индуцируются токи, и она же выполняет в конструкции роль магнитопровода.
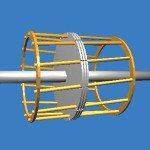
- Короткозамкнутый ротор (изобретён великим русским инженером Михаилом Осиповичем Доливо-Добровольским, как и весь трёхфазный ток) – система соединенных с помощью колец проводников, похожая по внешнему виду на беличье колесо. Внутри него индуцируются токи, чье электромагнитное поле вступает во взаимодействие с магнитным полем статора, в результате чего ротор приводится в движение.
Рекомендуем посмотреть это видео. Оно хоть и старое, но интересное и познавательное. Позволит закрыть непонятные моменты.
Трехфазный асинхронный двигатель. Принцип работы
Принцип действия асинхронного двигателя заключается во взаимном расположении обмоток и трехфазном напряжении, что приводит к возникновению вращающегося магнитного поля, которое и выступает движущей силой.
Подробнее говоря, при подаче питания на первичную обмотку, на фазах образуются три магнитных потока, изменяющихся в зависимости от частоты входного напряжения. Они смещены между собой не только в пространстве, но и во времени, благодаря чему и появляется вращающийся магнитный поток.
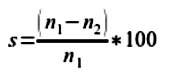
Во время вращения результирующий поток создает ЭДС в роторных проводниках. По причине того, что обмотка ротора представляет собой замкнутую цепь, в ней создается ток, создающий пусковой момент в направлении вращения магнитного поля статора. Это приводит к вращению ротора после превышения пусковым моментом его тормозного момента. Наблюдаемое в этот момент явление называется скольжением — величиной, показывающей в виде процентов соотношение частоты вращения магнитного поля к частоте вращения ротора. 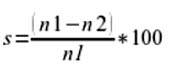
(n1 – частота магнитного поля статора; n2 – частота вращения ротора)
Скольжение является очень важным параметром. На старте его величина всегда равна 1 и, естественно, становится меньше по мере увеличения разности между n1 и n2, что сопровождается также уменьшением электродвижущей силы и вращающего момента. Во время работы на холостом ходу скольжение минимально и растет по мере увеличения статического момента. Достигнув критического скольжения (обозначается как sкр), может спровоцировать опрокидывание двигателя. После уравновешивания тормозного и электромагнитного момента изменения величин прекращаются.
Таким образом, принцип действия асинхронного двигателя основывается на взаимодействии магнитного поля ротора, находящегося во вращении, и токов, наведенных в роторе этим же полем. При этом обязательным условием возникновения вращающего момента является разница частот вращения полей.
Однофазный асинхронный двигатель
Фактически, любой асинхронный электродвигатель является трехфазным и предусматривает подключение к трехфазной сети с напряжением 380 В. Однофазным или двухфазным его называют при подключении к однофазной электросети с напряжением 200 В, когда питание подается лишь на две обмотки. В такой схеме на основную рабочую обмотку подается чистая фаза от сети, а на другую питание идет через фазосдвигающий элемент, как правило, конденсатор. Такая схема позволяет создать необходимую индукцию для смещения ротора и запустить асинхронный двигатель от однофазной сети. Для дальнейшей его работы даже необязательно, чтобы пусковая обмотка (которую подключают через конденсатор) оставалась под напряжением.
Дело в том, что трехфазный асинхронный двигатель продолжает функционировать (под малой нагрузкой) даже если во время работы от него отключить подачу энергии по одному из питающих проводов, сымитировав таким образом работу от однофазной сети. Это обусловлено тем, что результирующее магнитное поле сохраняет вращение.
Двухфазный асинхронный двигатель
Создать вращающееся магнитное поле можно и при использовании двухфазных обмоток. Для обеспечения работоспособности схемы фазы обмоток необходимо расположить с 90˚ смещением друг от друга. При их питании токами, которые смещены по фазе на 90˚, возникает вращающееся магнитное поле, как и в трехфазной машине.
Асинхронный двухфазный электродвигатель приводится в движение за счет токов, образуемых при взаимодействии результирующего поля с роторными стержнями. Он ускоряется до того момента, пока не будет достигнута предельная скорость его вращения. Для питания такого двигателя от электросети однофазного тока необходимо создать сдвиг по фазе на одной из обмоток. Для этого применяются конденсаторы необходимой ёмкости.
На сегодняшний день все большее применение находят двухфазные асинхронных двигатели с полым алюминиевым ротором. Вращение ему придают вихревые токи, образованные внутри цилиндра, при взаимодействии с вращающимся магнитным полем.
Инерционный момент ротора наделяет двигатель хорошими характеристиками для использования в некоторых специализированных отраслях, как, например, системы, регулирующие работу мостовых и компенсационных схем. Одна из обмоток в них подключается к питающей сети через конденсатор, а через вторую проходит управляющее напряжение.
Схемы подключения
Для того чтобы подключить трехфазный асинхронный двигатель используют несколько различных схем, но чаще всего применяются «треугольник» и «звезда».
Треугольник
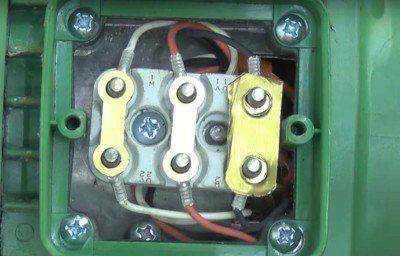
Преимущество данной схемы заключается в том, что при подключении согласно ей трехфазный двигатель может развивать наибольшую номинальную мощность. Для этого обмотки соединяются по принципу конец-начало, что на схематичном изображении похоже на треугольник, однако в виде треугольника понять что к чему, не всегда удобно. По этому предлагаем для анализа схему снизу, а затем фотографию уже в сборе (еще ниже).
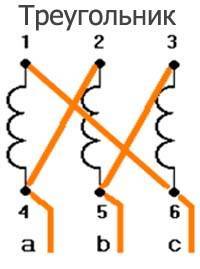
В трехфазных электрических сетях величина линейного напряжения между выводами обмоток составляет 380 В. При этом нет необходимости создания рабочего нуля. Важно отметить, что в такой схеме может возникнуть большой пусковой ток, значительно перегружающий проводку.
Звезда
Этот способ подключения является наиболее используемым в сетях с трехфазным током 380 В. Название схемы связано с тем, что концы обмоток соединяются в одной точке, словно звездные лучи. Начала обмоток подключаются посредством аппаратуры коммутации к фазным проводникам. В такой конструкции линейной напряжение между начал составляет 380 В, а между местом соединения и подключения проводника – 200 В. Ниже представлена схема, а еще ниже уже фотография в собранном виде.
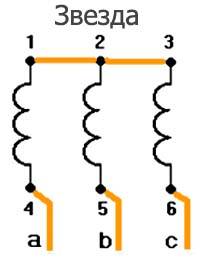
Трехфазный двигатель для 380 В сетей, подключенный таким образом, не способен развить максимальную силу из-за того, что напряжение на каждой обмотке составляет 220 В. В свою очередь, такая схема предотвращает возникновение перегрузок по току, чем обеспечивается плавный пуск.
Возможность подключения двигателя тем или иным способом, как правило, указывается на его табличке. Значок Y означает «звезду», а ∆ — «треугольник». Определить схему на уже подключенной машине можно по виду обмоток – одна двойная перемычка между ними говорит, что использована «звезда» (первое фото снизу), а если между клеммами обмоток видно три перемычки – «треугольник» (первое фото сверху).

В случае, когда необходимо запустить трехфазный асинхронный электродвигатель в обратном направлении вращения, следует поменять два питающих провода от трехфазного источника местами.
Функциональные и эксплуатационные особенности
Характерные преимущества асинхронных двигателей:
- В их конструкции нет коллекторных групп, которые увеличивают износ других видов двигателей за счет дополнительного трения.
- Питание асинхронных электрических машин не требует использования преобразователей и может осуществляться промышленной трехфазной сети.
- Из-за меньшего количества деталей и конструктивных элементов они относительно легко обслуживаются и имеют большой срок службы.
Среди недостатков можно отметить:
- Сфера применения асинхронных двигателей несколько ограничена из-за малого пускового момента.
- Высокая реактивная мощность, которую они потребляют во время работы, не оказывает влияние на механическую мощность.
- Большие пусковые токи, потребляемые на пуске этих двигателей, могут превышать допустимые значения некоторых систем.
Как производятся расчеты
Для того чтобы вычислить частоту вращения двигателя следует воспользоваться определенной нам ранее формулой скольжения:
И выразить из нее скорость вращения ротора:
В качестве примера возьмем двигатель модели АИР71А4У2 мощностью в 550 Вт с 4 парами полюсов и частотой вращения ротора 1360 об/мин.
При питании от сети с частотой 50 Гц статор будет вращаться со скоростью:
Таким образом, величина скольжения электродвигателя составляет:
И, наконец, прекрасное, хотя и устаревшее, видео рекомендуемое всем для одноразового просмотра.