4WS — 4 управляемых колеса
Первые полноуправляемые версии, что появились среди модификаций автомобилей Honda Prelude в 1987 году, снабжались механической системой с хитроумной кинематической связью между рулевыми рейками передних и задних колес. Кстати, тогда же на японском рынке произошел настоящий полноуправляемый бум: Mitsubishi Galant и Sigma, Mazda 626, а два года спустя и Toyota Celica — все обзавелись версиями с управляемыми задними колесами.
Применение систем управления всеми четырьмя колесами преследует три цели. Первая — получить переменную чувствительность автомобиля к повороту руля. Ведь при тихой езде по городским улочкам лучше иметь «острое» рулевое управление— чтобы не накручивать баранкой при каждом маневре. А на автостраде «острый» руль может вызвать проблемы — машина будет слишком резко реагировать даже на небольшие подруливания. Вторая цель — улучшить маневренность автомобиля при парковке или развороте в стесненных городских условиях, то есть уменьшить радиус поворота. И третья — повысить курсовую устойчивость при резких маневрах на высокой скорости.
Нынешняя система 4WS (4 Wheel Steer, то есть 4 управляемых колеса), устанавливаемая по заказу на купе Honda Prelude 2,2 VTi, является развитием предыдущей электронноуправляемой системы, которая в 1991 году сменила механическую. Задние колеса здесь поворачиваются с помощью специального рулевого механизма с электроприводом, встроенного в довольно сложную заднюю подвеску. А управляет им специальный электронный блок, который получает от нескольких датчиков информацию о скорости автомобиля, об угле поворота руля, передних и задних колес автомобиля и т. д.
Работает система 4WS в двух режимах. На малой скорости задние колеса поворачиваются в сторону, противоположную передним, и при маневре той же кривизны руль нужно будет вращать на меньший угол. То есть чувствительность рулевого управления будет выше, а вдобавок автомобиль станет более маневренным. К примеру, при развороте передние колеса будут вывернуты до упора влево, а задние — вправо на угол до восьми градусов. Радиус разворота при этом уменьшится на 15% по сравнению с обычным автомобилем и составит всего 4,7 метра!
А при движении на большой скорости — в быстром вираже или при перестроении из ряда в ряд на автостраде, — задние колеса с помощью системы 4WS, наоборот, будут поворачиваться на небольшой угол в ту же сторону, что и передние.

4WS: Поворот задних колес в ту же сторону, что и передних, позволяет сохранить направление и скорость движения центра масс автомобиля, но значительно увеличить мгновенный радиус поворота. При этом уменьшаются действующие на автомобиль боковые силы и, как следствие, повышается курсовая устойчивость
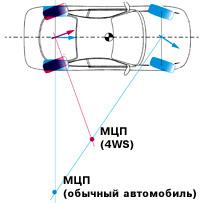
4WS: При движении на малой скорости задние колеса поворачиваются в противофазе с передними, и мгновенный радиус поворота уменьшается
МЦП — мгновенный центр поворота
К примеру, автомобиль, совершая маневр на автостраде, будет словно не поворачивать, а «переходить» из ряда в ряд параллельно полосам разметки. Что это даст? Машина будет двигаться по дуге меньшей кривизны и большего радиуса. Момент, поворачивающий машину вокруг вертикальной оси, будет меньше — стало быть, уменьшится и риск потери курсовой устойчивости и развития заноса задней оси
КЭБ Форум
Форум клуба энтузиастов биотранспорта
Страниц: 1
#1 2014-05-29 18:58:10
Задние управляемые колёса. Легко!
На днях ко мне на сайт заходил кто-то с Форума Олега. Я зашёл по обратному адресу , и моё внимание привлекла фраза: «А что всё-таки можно сделать веломобиль с задними управляемыми колёсами?».
Мне кажется, что в этом вопросе давно уже пора поставить точку.Предлагаю заглянуть на мою страницу: http://www.keeper523.chat.ru/cycle2.1.htm :
Прошло уже более 25 лет со дня выхода в свет «Букашки», а обсуждение вопроса о возможности существования безопасного управления задними колёсами продолжается.
Да, в своё время мне тоже говорили, что этого сделать нельзя, но я сделал. И думал, что на этом всё закончится. За эти годы я, конечно, натыкался на обсуждение этого вопроса, но мне было не до этого (тренажёры, спортивные сани, оружие и т.п.) Да и вопрос этот мне не казался таким сложным. Думал, разберутся сами.
Извините, что так долго молчал. Но ведь и вы хороши. За эти 25 с лишним лет НИКТО не спросил, а как я это сделал, хотя телефон и почта указаны на сайте. Мне казалось, что там всё легко и просто. Да вы и сами сейчас в этом убедитесь.
Постараюсь на простых схемах объяснить механику этого устройства, чтобы оно заработало и у Вас.
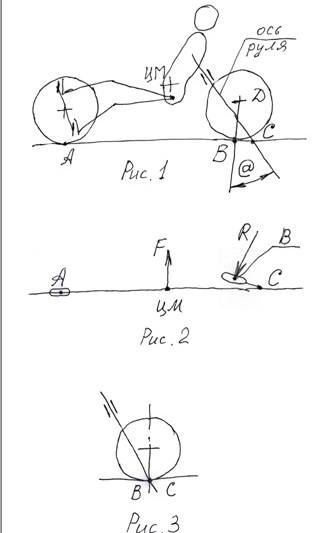
На рис. 1 показана примитивная схема веломобиля с задними управляемыми колёсами (или колесом). Фишка в том, что ось руля должна проходить так, как здесь показано, между точками В и D.
На Рис.2 показана схема веломобиля (в/м) сверху с точками контакта колёс с дорогой А и В, центробежной силой F приложенной к точке ЦМ (Центр Масс) и реакцией на управляемое колесо R и проекцией оси поворота руля С на дороге.
Действующая на колесо реакция R от центробежной силы F при движении по радиусу (на повороте) будет стремиться поставить колесо вдоль оси в/м и обеспечить прямолинейное движение.
Угол наклона оси руля и нахождение её ниже оси рулевого колеса, также будут способствовать самоустановке колеса. Чем больше расстояние между точками В и С, тем с большей силой рулевое колесо будет стремиться к совпадению с осью в/м. Чем больше угол @, тем сильнее колесо будет стремиться к плоскости в/м (к совпадению с осью в/м). Но все эти «сильнее» будут затруднять управление. Надо будет прилагать большие усилия к рулю.
Конкретное расположение точки С, величина угла @ в большей степени зависит от расположения ЦМ относительно управляемого колеса. Чем они ближе, тем больше реакция R, тем меньше надо делать плечо ВС, чтобы обеспечить нормальное усилие для управления.
Всё это можно рассчитать по формулам или подобрать на практике методом «научного тыка».
Когда я делал свою Букашку, я очень спешил к Шауляю и времени для подбора или расчёта расположения нужных точек у меня не было. Поэтому я выбрал нейтральное положение точки С, т.е. я совместил её с точкой В. Я пожертвовал самоустановкой колёс, но избежал их «складывания» при повороте (Рис. 3).
Как видите, всё действительно очень просто.
Извините, всё писалось на скорую руку, поэтому не стесняйтесь с вопросами. Или опять будете вариться в себе?
#2 2014-06-05 16:42:38
Re: Задние управляемые колёса. Легко!
И ни слова о количестве колёс.
Если два, то ваша букашка при такой компоновке была бы почти неуправляемой, а если три и больше, то такие веломобили успешно существуют. В любом случае, хотелось бы фото реально существовавшей модели.
Отредактированно Илюха (2014-06-05 17:35:37)
#3 2014-06-05 19:20:35
Re: Задние управляемые колёса. Легко!
Букашка написал:
#4 2014-06-08 14:44:23
Re: Задние управляемые колёса. Легко!
Дорогой Илюха, растолкуй свою мысль поподробней. Что значит два, и она была бы почти неуправляемая? Кстати, Букашка имя собственное и писать надо с большой буквы. Что значит 3 и таких много? Да, и попробуй это сделать не на словах, а на физическом (механическом) уровне, чтоб всякий тебя понять смог.
#5 2014-06-09 01:40:05
Re: Задние управляемые колёса. Легко!
Букашка написал:
Что значит два, и она была бы почти неуправляемая?
Букашка написал:
Что значит 3 и таких много?
Отредактированно Илюха (2014-06-09 01:40:29)
#6 2014-06-09 18:45:34
Re: Задние управляемые колёса. Легко!
Извини, но первая твоя ссылка про «ломающуюся раму» «уму не растяжима». А вот вторая с эскизами понятна и без слов.
Картинку смотрите здесь http://www.keeper523.chat.ru/cycle2.1.htm Я не знаю как её сюда вставить.
Всё что надо было здесь сделать голландцу Фреду де Вирта или новому владельцу АВТ Эрику Ванне это сместить ось руля как я здесь показал. И вперёд!
Остальные твои ссылки посмотрю, скорее всего, на выходных. Сейчас нет времени.
Да, моё мнение: сделать хорошо управляемый (самоуправляемый) веломобиль с ломающейся рамой нельзя.
#7 2014-06-16 16:00:32
Re: Задние управляемые колёса. Легко!
Илья, вот этот 3-х колёсный то, что надо! У него рулевое сделано, так как я и предлагаю.
Смотрите опять же здесь: http://www.keeper523.chat.ru/cycle2.1.htm
#8 2014-06-18 00:06:36
Re: Задние управляемые колёса. Легко!
Мне кажется если поменять угол рулевой в точности наоборот, то 2х колесный поедет.
#9 2014-06-22 23:45:15
Re: Задние управляемые колёса. Легко!
Извиняюсь за задержки с ответами, но у меня сообщения о сообщениях на форуме приходят в СПАМ.
Теперь по делу.
Поехать-то он поедет, только куда? Попробуй, поменяй «в точности до наоборот» и посмотри, что будут делать реакции с управляемыми колёсами. В механике волочешь?
Веломобиль будет «складываться».
Думаю надо пояснить.
В моём варианте, если я, находясь в повороте, отпущу руль, веломобиль сам выйдет на прямолинейное движение. Реакции на колёса (колесо) заставят.
В твоём случае он будет продолжать поворачивать, причём даже круче чем ты хотел бы. Он будет стремиться к минимально возможному радиусу поворота. Т.е. ты чуть-чуть отклонил руль от прямолинейного движения или это произошло самопроизвольно и машина сама довернёт остальное до 90 градусов. Удержать её будет трудно. Опять же это сделают реакции на колёса или на колесо, в зависимости от принятой схемы.
Есть ещё непонятности? Спрашивайте.
#10 2014-10-11 11:48:58
Re: Задние управляемые колёса. Легко!
Букашка была (или есть) трёхколесным веломобилем я так понимаю, на двухколесном заднее управление поможет ли удержать равновесие вот в чем вопрос был.
#11 2015-02-03 23:11:55
Re: Задние управляемые колёса. Легко!
Последнее время тема веломобилей с задним управляемым колесом (колесами) вновь набирает интерес. Вопрос был достаточно хорошо изучен начиная к конца 70-х годов (за рубежом это Craig J. Cornelius, Jerry S. Onufer, Lee H. Laiterman, в СССР – В.Рузгис, Валерий Андреевич Сенновский и другие).
Первая конструкция была изобретена и запатентована Лаубахом в 1869 году и послужила отправной точкой для дальнейших исследований.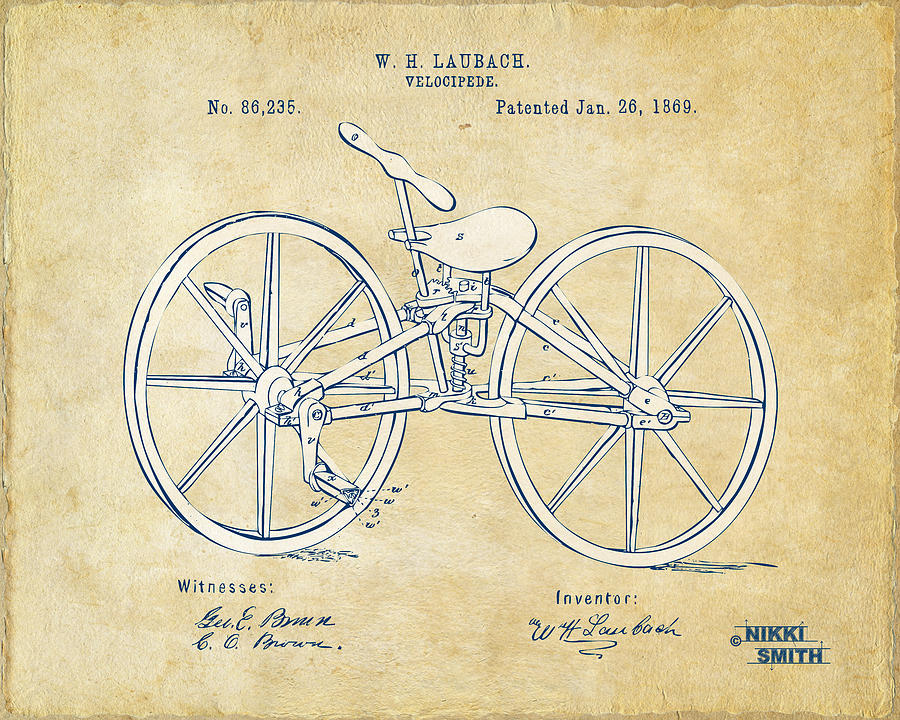
В частности, на этот велосипед ссылается Craig J. Cornelius, который является автором более чем десятка веломобилей с задним управляемым колесом:
На фото: Plywood Flyer (1977)
Наиболее совершенная конструкция этого инженера – VelAero (1988). Она зарекомендовала себя очень устойчивой на высоких скоростях (45 км/ч), но становилась нестабильной при скорости ниже 7-10 км/ч.

Модель имела вес порядка 15 кг и была достаточно комфортной и скоростной.
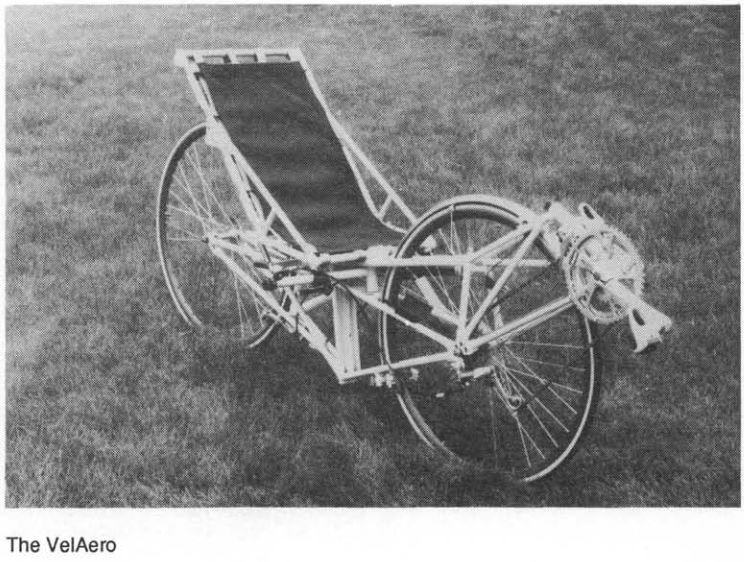
Механизм рулевого привода имел переменное отношение 3:1
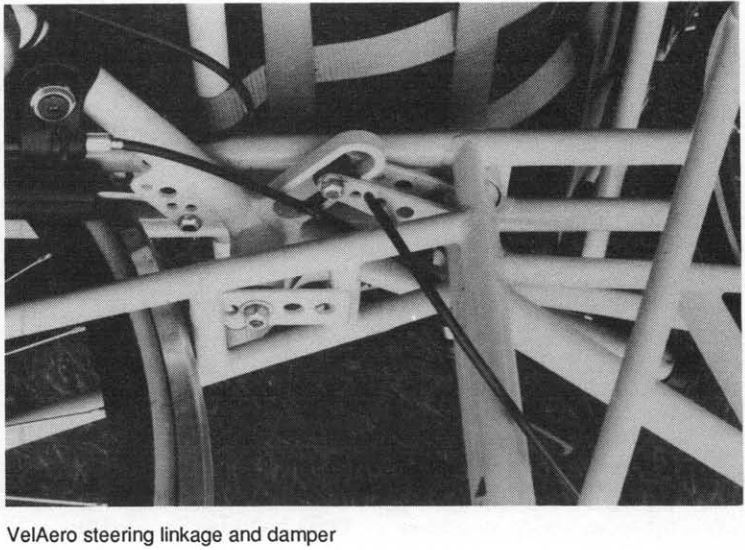
Это позволило достичь чувствительного рулевого управления с углами поворота 30 градусов.

В девяностые годы ХХ в европейские конструкторы также делали много попыток создать компактный и управляемый веломобиль. Это в основном голландцы Fred de Weert (1991), Erik Wannee, Jurriaan Bol (1995), немец Hans-Ulrich Reimers.
В начале 2000-х к теме наблюдалось некоторое угасание интереса, но за последнее десятилетие появились новые прототипы веломобилей с задним управляемым колесом, такие как EcoVia:

Mark 2 (Dennis Renner, 2008)

В то же время в Харькове появляется интересный трехколесный заднеуправляемый веломобиль Юрия Ружинского:

Студенты Калифорнийского политехнического института в рамках подготовки к Международному конкурсу мускульного транспорта в 2010 разработали свою конструкцию двухколесного веломобиля с задним управляемым колесом. Особенности управления рычагами хорошо заметны на видео:

Двухколесный веломобиль с планетарной втулкой в переднем колесе и задней подвеской (Mohsen Saleh, 2012):

Заднеуправляемый трайк с планетарной втулкой в переднем колесе (Mohsen Saleh, 2013):

Очевидно, что схема с неподвижным ведущим передним колесом до сих пор не потеряла свою привлекательность как конструкторская задача и будет иметь дальнейшее развитие.
Отредактированно Alexey (2015-02-04 00:06:55)
#12 2015-02-04 11:49:03
Re: Задние управляемые колёса. Легко!
Весь интерес к заднему управлению давно угас. Все эти конструкторские изыски ни к чему не привели. Все двухколёски в мире выпускаются с передним управляемым колесом.
Вся эта тема пережёвана на соседнем веломобильном форуме и все дружно её закрыли как неперспективную.
Заднее управление применимо только для трёхколёсок для инвалидов для передвижения с небольшой скоростью.
#13 2015-02-06 22:02:29
Re: Задние управляемые колёса. Легко!
Другая интересная конструкция с заднеуправляемыми колесами и передним эллиптическим приводом — The Vacuum Velocipede, автор Dave Berkstresser, 1988.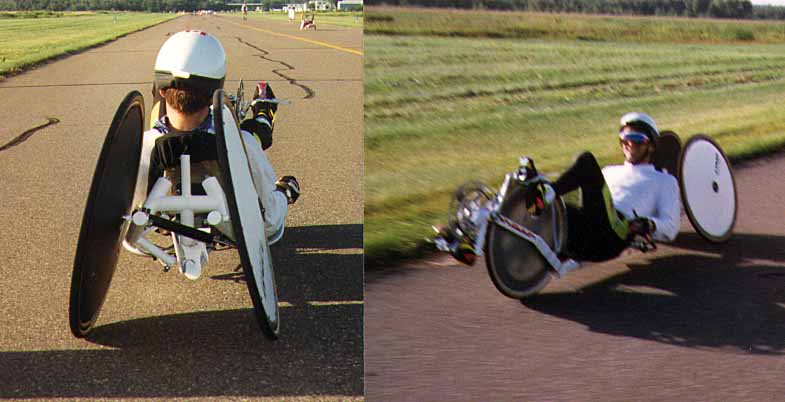
Идея была в том, чтобы построить скоростную веломашину для соревнований, причем эта мысль появилась у Дейва после того, как он увидел заезды IHPVA 1980 года еще будучи учеником старших классов. Задача, которую хотел решить Дейв — сконструировать веломобиль, который может стартовать и останавливаться без посторонней помощи, поэтому была выбрана трехколесная схема с двумя колесами сзади (тип дельта-трайк). Также веломобиль должен был быть способным разворачиваться на 180 градусов с минимальным радиусом. Расчеты рулевой геометрии были произведены компьютерным методом, с помощью самостоятельно написанных алгоритмов, каждое полученое решение было проанализировано и сравнивалось с остальными. Первый прототип был посторен из трех старых велосипедов и показал отличную способность к крутым поворотам и разворотам. Однако первые заезды выявили серьезный недостаток веломобиля — на скорости в 25 км/ч начинался сильный «вобблинг» или высокочастотная осцилляция задних колес. При снижении скорости этот эффект пропадал. 
Переднее колесо не выдерживало сильных осевых перегрузок при крутых поворотах и после нескольких заездов обод лопнул. Пришлось вытачивать спецвтулку без фланцев и спицевать колесо непосредственно в корпус втулки.
Квазилинейный привод веломобиля также оказался со своими особенностями. Не смотря на то, что с этим типом привода стало возможно педалировать одной ногой, из-за того, что траектория движения ноги вперед и назад практически совпадали, работало меньшее количество мышц ноги и гонщик быстро утомлялся, хотя мощность развивалась большая. Выяснилось, что было очень сложно стартовать, когда педали находятся в крайних положениях, и неожиданно обнаружились мертвые точки.
Тем не менее, веломобиль вошел в каталоги Sharper Image catalog и Hamacher-Schlemer catalog, и даже при высокой стоимости изготовления точеных узлов, было продано порядка 30 наборов для самостоятельной сборки.