Структурная схема электропривода
ОСНОВЫ ТЕОРИИ ЭЛЕКТРОПРИВОДА
ВВЕДЕНИЕ
Производственные агрегаты состоят из большого, отдельных машин аппаратов и деталей, выполняющих различные функции. Все части агрегатов в совокупности совершают работу, которая обеспечивает какой либо производственный процесс. Любой производственный агрегат или машинное устройство состоит из трёх основных частей: двигателя (служит для получения механической энергии), передаточного механизма (служит для пердачи механической энергии от двигателя) и исполнительного механизма, выполняющего производственный процесс (крыльчатка вентилятора, барабан лебёдки, брашпиль и т.д.) [1]. Исполнительный механизм так же называют рабочим органом.
Первые два элемента сложного производственного агрегата служат для приведения в движение исполнительного механизма , поэтому их обьединяют под общим названием привод.
Примером первого, простейшего привода является ручной привод ( человек рукой приводил в движение устройство для совершения полезной работы), затем появился конный привод (усилие человека заменено тяговой силой животного). На смену им пришёл механический привод , в котором механическая энергия пердавалась от ветряного, водяного колеса, паровой турбины, двигателя внутреннего сгорания.
В настоящее время для приведения в движение большинства рабочих машин применяется электрический двигатель и основным типом привода является электрический привод или электропривод.
ТЕМА ЛЕКЦИИ 1
Основные понятия электропривода
ПЛАН ЛЕКЦИИ
Структурная схема электропривода
Общая классификация электроприводов
Классификация судовых электроприводов
Структурная схема электропривода
Электрический привод представляет собой электромеханическую систему , предназначенную для приведения в движение исполнительных органов рабочей машины и управления этим движением.
В общем случае электропривод состоит из 4-х устройств ( рис.1.1 ):
Преобразовательное устройство предназначено для преобразования рода тока, напряжения и частоты тока питающей сети и передачи преобразованных параметров сети в электрическую часть электропривода. Поэтому оно включается между питающей сетью и электрической частью электропривода.
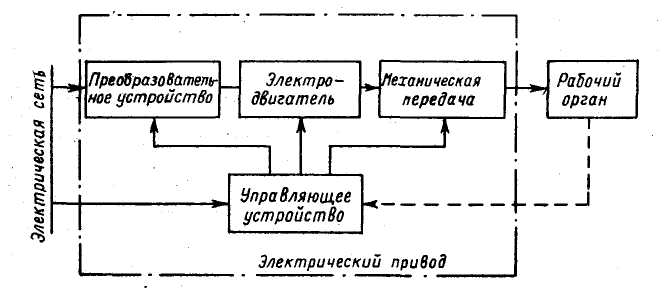
Рис. 1.1. Структурная схема электропривода
В качестве преобразовательных устройств используются:
1. для преобразования рода тока – выпрямители, преобразующие переменный ток в постоянный;
2. для преобразования напряжения – трансформаторы, преобразующие переменное напряжение одного значения в переменное напряжение другого значения той же частоты;
3. для преобразования частоты тока – преобразователи частоты, преобразующие переменный ток одной частоты в переменный ток другой, регулируемой частоты.
4. для преобразования напряжения – инверторы, преобразующие постоянное напряжение в пременное регулируемой амплитуды и частоты
Рассмотрим поочередно преобразовательные устройства.
Общая структура электропривода. Структурная схема




![]()
![]()
Электропривод имеет два канала — силовой и информационный (рис.3.2.1). По первому транспортируется преобразуемая энергия (широкие стрелки на рис. 3.2.1), по второму осуществляется управление потоком энергии, а также сбор и обработка сведений о состоянии и функционировании системы, диагностика ее неисправностей (тонкие стрелки на рис. 3.2.1).
Рис. 3.2.1. Общая структура электропривода.
Силовой канал в свою очередь состоит из двух частей — электрической и механической и обязательно содержит связующее звено- электромеханический преобразователь.
В электрическую часть силового канала входят устройства ЭП, передающие электрическую энергию от источника питания (шин промышленной электрической сети, автономного электрического генератора, аккумуляторной батареи и т.п.) к электромеханическому преобразователю ЭМП и обратно и осуществляющие, если это нужно, преобразование электрической энергии.
Механическая часть состоит из подвижного органа электромеханического преобразователя, механических передач и исполнительного органа установки, в котором полезно реализуется механическая энергия.
Электропривод взаимодействует с системой электроснабжения или источником электрической энергии, с одной стороны, с технологической установкой или машиной, с другой стороны, и наконец, через информационный преобразователь ИП с информационной системой более высокого уровня, часто с человеком — оператором, с третьей стороны (рис. 3.2.1).
Функция электрического преобразователя ЭП (если он используется) состоит в преобразовании электрической энергии, поставляемой источником (сетью) и характеризуемой напряжением Uс и током Iс сети, в электрическую же энергию, требуемую двигателем и характеризуемую величинами U, I. Преобразователи бывают неуправляемыми (трансформатор, выпрямитель, параметрический источник тока) и чаще — управляемыми (мотор-генератор, управляемый выпрямитель, преобразователь частоты). Электромеханический преобразователь ЭМП (двигатель), всегда присутствующий в электроприводе, преобразует электрическую энергию (U, I) в механическую (М,  ) и обратно.
) и обратно.
Механический преобразователь (передача) — редуктор, система блоков, кривошипно-шатунный механизм и т.п. осуществляет согласование момента М и скорости двигателя с моментом Мм (усилием Fм) и скоростью wм рабочего органа технологической машины.
1. Рабочий орган технол. уст.
Шпиндель токарного станка; подвижной стол строгального станка; лента (цепь) конвейера; ковш экскаватора; кабина подъемника; крыльчатка насоса; валки прокатного стана; ходовой винт механизма подачи станка; тележка механизма передвижения крана; крюк подъемной лебедки
Двигатель постоянного тока с разными видами возбуждения; асинхронный двигатель с фазным или короткозамкнутым ротором; синхронный двигатель; линейные двигатели постоянного или переменного тока; вентильный двигатель; шаговый двигатель; двигатели с катящимися и волновыми роторами; редукторные двигатели
3. Механическое передаточное
Цилиндрические и червячные редукторы; планетарная передача; передача винт ‑ гайка; волновая передача; кривошипно-шатунная передача; цепная и ременная передачи; реечная передача
Управляемый выпрямитель; преобразователи частоты, напряжения переменного тока; импульсные преобразователи напряжения; инверторы
5. Управляющее устройство
Кнопка, ключ управления; регулятор; управляющая вычислительная машина; реле; логические элементы; усилитель; фазовый детектор
6. Источник электрической
Однофазная или трехфазная сеть переменного тока промышленной частоты; цеховая сеть постоянного тока; аккумуляторная батарея; дизель-генераторная установка; солнечная батарея
Курсовая работа: Структурная схема и управление электроприводом
| Название: Структурная схема и управление электроприводом Раздел: Рефераты по физике Тип: курсовая работа Добавлен 20:25:52 14 декабря 2010 Похожие работы Просмотров: 1019 Комментариев: 13 Оценило: 2 человек Средний балл: 5 Оценка: неизвестно Скачать | ||||||||||||||


| Uф.с.м , В | nc , об/мин | rc , Ом | xc , Ом | rp ’, Ом | xp ’, Ом |
| 220 | 875 | 3,6 | 2,58 | 5,7 | 2,63 |
1. Описание САУ переменного тока
Развитие полупроводниковой преобразовательной техники привело к широкому использованию электроприводов с электродвигателями переменного тока, к созданию новых систем управления этими электродвигателями. По сравнению с системами управления электроприводами постоянного тока системы управления электроприводами переменного тока значительно более разнообразны. В регулируемых электроприводах используются асинхронные электродвигатели с короткозамкнутым или фазным ротором, синхронные и вентильные электродвигатели. Применяются различные способы регулирования скорости электродвигателя путем изменения: напряжения статора, частоты и напряжения статора, частоты и напряжения ротора, добавочного сопротивления в цепи ротора и др. Используется значительно большее число регулируемых координат, чем в электроприводах постоянного тока. Вместе с тем имеются определенные ограничения в использовании того или иного способа управления и созданной на основе этого способа системы управления электродвигателем. Все эти обстоятельства затрудняют формирование общих подходов к синтезу АСУ ЭП переменного тока в такой степени, как это было сделано в АСУ ЭП постоянного тока.
Управление электродвигателями переменного тока осложнено рядом обстоятельств, наиболее существенными из которых являются следующие: 1) момент электродвигателя определяется произведением двух результирующих векторов электромагнитных параметров статора и ротора и является функцией четырех переменных; 2) имеется сильное взаимодействие намагничивающих сил статора и ротора, взаимное состояние которых непрерывно меняется при вращении ротора; 3) с целью лучшего использования двигателя в различных режимах его работы возникает задача регулирования магнитного потока двигателя.
Электродвигатели переменного тока совместно с управляемыми преобразователями представляют собой сложные многосвязные нелинейные объекты управления. Полное математическое описание таких объектов оказывается довольно громоздким и неприменимым для инженерных методов синтеза систем управления. Вместе с тем в практике построения систем электроприводов, включая и АСУ ЭП переменного тока, получили распространение простые приемы синтеза систем управления, основанные на принципах подчиненного управления и на использовании унифицированных настроек контуров регулирования, входящих в систему управления. Использование этих приемов позволяет не только просто выполнить синтез систем управления, но и создает обоснованную возможность упрощения математического описания электроприводов переменного тока, в частности возможность пренебрежения взаимосвязью ряда координат и параметров электроприводов.
Основная сложность при создании АСУ ЭП переменного тока заключается в создании независимого управления электромагнитным моментом и потоком двигателя. Если это удается выполнить, то АСУ ЭП переменного тока с обратными связями по скорости или по положению выполняются точно так же, как и АСУ ЭП постоянного тока, включая и способы управления пусковыми и тормозными режимами.
При синтезе взаимосвязанных систем управления используются два основных приема, обеспечивающих автономность (независимость) контуров регулирования: а) использование различного рода дополнительных компенсационных связей между локальными контурами регулирования; б) разделение локальных контуров регулирования по быстродействию. Оба этих приема используются при выполнении АСУ ЭП переменного тока, и это дает основание уже на стадии формирования математической модели электропривода делать ряд упрощений.
2. Статические характеристики САУ переменного тока
2.1 Математическое описание преобразователя частоты (ПЧ) с промежуточным звеном постоянного тока на основе АИН

УВ – управляемый выпрямитель, отвечает за напряжение подаваемое на асинхронный двигатель;
АИН – автономный инвертор напряжения, отвечает за частоту подаваемого напряжения на асинхронный двигатель.
Функциональная схема преобразователя частоты
 |
Исходное дифференциальное уравнение

Запишем эти уравнения в операторной форме


Структурная схема ПЧ на основе АИН.
 |
2.2 Математическое описание асинхронного двигателя при управлении частотой и напряжением статора
При исследовании переходных процессов в трехфазных асинхронных электродвигателях целесообразно принять следующие допущения, позволяющие в доступной математической форме выразить соотношения основных параметров и координат электродвигателя:
1) намагничивающие силы обмоток двигателя распределены синусоидально вдоль окружности воздушного зазора;
2) потери встали статора и ротора отсутствуют;
3) обмотки статора и ротора строго симметричны со сдвигом осей обмоток на 120°;
4) насыщение магнитной цепи отсутствует.
Уравнения равновесия напряжений для обмоток трех фаз статора имеют вид
 (1)
(1)
Соответственно для обмоток трех фаз ротора
 (2)
(2)
Где  — мгновенные значения фазных напряжений статора и ротора;
— мгновенные значения фазных напряжений статора и ротора;
 — мгновенные значения фазных токов статора и ротора;
— мгновенные значения фазных токов статора и ротора;
 — полные потокосцепления фазных обмоток;
— полные потокосцепления фазных обмоток;
R1 , R2 — активные сопротивления обмоток статора и ротора.
Асинхронный электродвигатель представляет собой систему магнитно-связанных обмоток, расположенных на статоре и роторе. При вращении ротора взаимное положение обмоток статора и ротора непрерывно изменяется, соответственно изменяется и взаимная индуктивность между ними. С учетом принятых допущений можно считать, что взаимная индуктивность пропорциональна косинусу текущего угла между осями обмоток ротора и статора.
При математическом описании трехфазных асинхронных двигателей удобно оперировать не мгновенным значениями координат, а их результирующими векторами. Если, например, мгновенные значения токов равны ia , ib , ic , то результирующий вектор тока определяется уравнением:
 ,
,
Где a 0 =e j 0 =1; a=e j 2 π /3 ; a 2 = e j 4 π /3 .
Аналогично определяются результирующие векторы напряжения


Используя выражения результирующих векторов, уравнения (1) можно записать в виде одного дифференциального уравнения в векторной форме. Для этого первое уравнение из (1) умножается на 2/3a 0 , второе на 2/3a, третье на 2/3a 2 . Суммируя полученные произведения, получим

или в векторной форме
 (4)
(4)
Аналогично векторное уравнение напряжений ротора:
 (5)
(5)
В уравнениях (4) и (5) векторы записаны соответственно в системах координат статора и ротора. Для совместного решения уравнений их необходимо привести к одной системе координат.
При исследовании переходных процессов в электродвигателях переменного тока применяют различные ортогональные системы координат, отличающиеся угловой скоростью вращения координатных осей сок, например системы, оси которых неподвижны относительно ротора, или неподвижны относительно статора, или вращаются с синхронной скоростью.
Уравнения асинхронного электродвигателя в системе координат, вращающейся с произвольной скоростью ωк , имеют вид
 (6)
(6)
где ω — угловая скорость вращения ротора; pп — число пар полюсов.
При исследовании переходных процессов в асинхронном электродвигателе, управляемом частотой и напряжением статора, удобно использовать систему координат, вращающуюся со скоростью ωк , равной угловой скорости вращения магнитного поля ω ’, приведенной к числу пар полюсов, равному единице (приведенной к двухполюсному электродвигателю). Предполагается при этом справедливым равенство
 ,
,
где f1 — частота напряжения статора, Гц; ω1 — угловая частота напряжения статора, рад/с.
На основании уравнений (6) для рассматриваемой координатной системы можно записать
 (7)
(7)
где s — скольжение электродвигателя:

(ω = ω ’/pп — угловая скорость вращения магнитного поля, или синхронная скорость электродвигателя).
Потокосцепления связаны с токами через индуктивности
 (8)
(8)
Для определения электромагнитного момента асинхронного электродвигателя используется векторное произведение ψ1 и i1
 (9)
(9)
или векторное произведение ψ2 и i2 ’, тогда
 (10)
(10)
Учитывая выражения (8), можно записать (9) и (10) в виде
 ; (11)
; (11)
 . (12)
. (12)
Вторые равенства в уравнениях (11), (12) справедливы потому, что векторное произведение двух одинаково направленных векторов равно нулю.
Для полного описания переходных процессов в асинхронном электродвигателе к уравнениям напряжений и моментов следуй добавить уравнение
 , (13)
, (13)
записанное для скалярных значений моментов М и Мс .
Полученная система уравнений электродвигателя является нелинейной, и решение ее для различных динамических режимов работы электродвигателя может быть выполнено с использованием вычислительных машин. При синтезе систем управления асинхронным электродвигателем целесообразно располагать простыми и наглядными динамическими моделями электродвигателя в виде передаточных функций или структурных схем. Такая возможность появляется, если рассматривать переходные процессы в отклонениях относительно начальных координат электродвигателя.
Сравнительно простая структурная схема может быть получена, если пренебречь активным сопротивлением статорной цепи, т. е. положить R1 =0. Безусловно, что такое пренебрежение накладывает определенные ограничения на использование получаемых моделей. Они вполне применимы для систем с небольшим диапазоном регулирования скорости относительно синхронной скорости, для электродвигателей средней и большой мощности. При широком регулировании скорости, а также для электродвигателей малой мощности необходимы уточнения структурных схем.
Для дальнейших исследований динамических свойств асинхронных ^ электродвигателей целесообразно результирующие векторы представить в виде проекций на комплексной плоскости и записать их через вещественные и мнимые части в следующем виде:

 (14)
(14)
Совместив вектор напряжения статора с действительной осью координатной системы, т. е. положив u1 β =0, на основании (7) получим
 ; (15)
; (15)
 ; (16)
; (16)
 ; (17)
; (17)
 . (18)
. (18)
Выразив также электромагнитный момент по уравнению (9) через составляющие векторов тока и потокосцепления

и применив правило векторного произведения векторов, получим абсолютное значение момента:
 , (19a)
, (19a)
где  ;
;

Воспользовавшись выражением (10), можно аналогично получить
 (19б)
(19б)
где  ;
;

Составляющие тока ротора могут быть выражены через составляющие потокосцепления в следующем виде:
 (20)
(20)
где k1 — коэффициент электромагнитной связи статора;
 . (21б)
. (21б)
С учетом (8) и (21а) можно выражения моментов записать в форме, удобной для вывода передаточных функций двигателя;

 . (22)
. (22)
В случае одновременного изменения частоты и напряжения статора, при котором потокосцепление статора остается постоянным, из уравнений (15) и (16) можно получить
 (23)
(23)
Для двигателя с короткозамкнутым ротором в уравнениях (17), (18)  . Выразив из уравнений (20) ψ2α и ψ2β и подставив их в уравнения (17), (18), получим
. Выразив из уравнений (20) ψ2α и ψ2β и подставив их в уравнения (17), (18), получим
 (24)
(24)
 (25)
(25)
 . (26)
. (26)
Рассматривая переменные величины в приращениях относительно начальных значений  ,
,  ,
,  ,
,  ,
,  ,
,  , получим из (23) — (26) уравнения для статического режима, связывающие начальные значения координат,
, получим из (23) — (26) уравнения для статического режима, связывающие начальные значения координат,
 (27)
(27)
 (28)
(28)
 (29)
(29)
 (30)
(30)
и уравнения для динамического режима, связывающие приращения координат:
 (31)
(31)
 (32)
(32)
 (33)
(33)
где  — электромагнитная постоянная времени электродвигателя;
— электромагнитная постоянная времени электродвигателя;
 — критическое скольжение.
— критическое скольжение.
На основании уравнений (27)-(33) можно записать передаточную функцию
 (34)
(34)
Выражение  в первом слагаемом числителя (34) представляет собой значение фиктивного пускового момента Мп.ф. определяемое в результате линеаризации рабочей части механической характеристики двигателя для принятых значений напряжения статора U1α и угловой частоты напряжения статора Ω1 :
в первом слагаемом числителя (34) представляет собой значение фиктивного пускового момента Мп.ф. определяемое в результате линеаризации рабочей части механической характеристики двигателя для принятых значений напряжения статора U1α и угловой частоты напряжения статора Ω1 :
 , (35)
, (35)
где  — критический момент двигателя.
— критический момент двигателя.
Момент Мнач во втором слагаемом числителя (34) можно записать с учетом принятых допущений в виде
 , (36)
, (36)
С учетом (35) и (36) выражение (34) примет следующий вид:
 . (37)
. (37)
Для рабочей части механической характеристики двигателя можно принять
 ,
,
и тогда передаточную функцию (37) можно записать в упрощенном виде
 (38)
(38)
Представив зависимость скольжения электродвигателя от угловой частоты напряжения статора в приращениях и выполнив линеаризацию при условии, что в рабочей области s 4 , p 3 , p 2 , p 1 , p 0 соответственно.
 ;
;
 ;
;




 ;
;

Рассчитаем данные коэффициенты с помощью MathCad.

4. Анализ устойчивости САУ.
4.1 Критерий устойчивости Гурвица




Вывод: Исходя из критерия устойчивости Гурвица система устойчива.
4.2 Критерий устойчивости Найквиста




4.3 Критерий устойчивости Михайлова

 |


4.4 Построение логарифмических амплитудно- и фазочастотных характеристик
Формулы для расчета ЛАЧХ и ФЧХ.
 ;
;






Запас по фазе равен 85,9
Частота среза равна 15 рад/с
5. Расчет переходного процесса
Для получения графика переходного процесса выполним обратное преобразование Лапласа для функции.










В ходе проделанной курсовой работы я получил практические навыки по построению структурной схемы для системы «Управляемый выпрямитель — автономный инвертор напряжения – асинхронный двигатель». Получил передаточную функцию. Проверил систему автоматического управления на устойчивость с помощью критериев устойчивости (Гурвица, Найквиста, Михайлова).
Построил логарифмические амплитудно- и фазо-частотные характеристики и график переходного процесса.
1. Комплектные электроприводы: Контрольные задания и методические указания для студентов заочного факультета специальности 21.05. / Сост. С.Н. Сидоров – Ульяновск, 1990. – 44с.
2. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-ние, 1982. – 392 с., ил.
3. Настройка комплектного электропривода постоянного тока ЭТУ 3601: сборник лабораторных работ для студентов специальности 21.05./Сост. С.Н. Сидоров. – Ульяновск, 1992. — 28 с.
➤ Adblockdetector