Схемы электродвигателей постоянного тока и их характеристики
 Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
1. с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ,
2. с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря,
3. с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря,
4. со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая — последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов .
Электродвигатель постоянного тока с независимым возбуждением
В этом электродвигателе (рис. 1, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения — к вспомогательному источнику в напряжением UB. В цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rn.
Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой — для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. Зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными (рис. 2, а). Следовательно, линейной будет и механическая характеристика двигателя — зависимость п (М) (рис. 2, б).
При отсутствии в цепи якоря реостата с сопротивлением Rn скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения IяΣRя в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3—5 % от Uном. Эти характеристики (прямые 1 на рис. 2, а и б) называются естественными. При включении в цепь якоря реостата с сопротивлением Rn угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным значениям Rn1, Rn2 и Rn3.
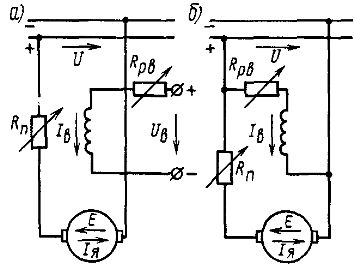
Рис. 1. Принципиальные схемы электродвигателей постоянного тока с независимым (а) и параллельным (б) возбуждением
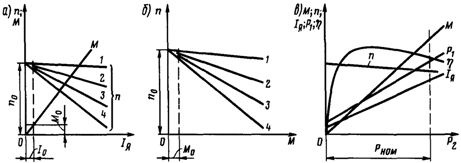
Рис. 2. Характеристики электродвигателей постоянного тока с независимым и параллельным возбуждением : а — скоростные и моментная, б — механические, в — рабочие Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом будет изменяться и частота вращения n.
В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря Iя и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания.
Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Фост от остаточного магнетизма) и э. д. с. Е и возрастает ток Iя. А так как приложенное напряжение U остается неизменным, то частота вращения n будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E= U — IяΣRя.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток Iя, и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I0, необходимый для компенсации внутренних потерь мощности, и развивает некоторый момент M0, требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше n0.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р2 (рис. 2, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря Iя и мощности Р1 от Р2 также практически линейны. Ток Iя и мощность Р1 при Р2 = 0 представляют собой ток холостого хода I0 и мощность Р0, потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин.
Электродвигатель постоянного тока с параллельным возбуждением
В этом электродвигателе (см. рис. 1, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат Rpв, а в цепь обмотки якоря — пусковой реостат Rп.
В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения Iв и магнитного потока Ф, что приводит к увеличению тока обмотки якоря Iя. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель постоянного тока с последовательным возбуждением
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 3, а), а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв.
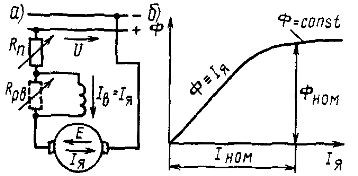
Рис. 3. Принципиальная схема электродвигателя постоянного тока с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
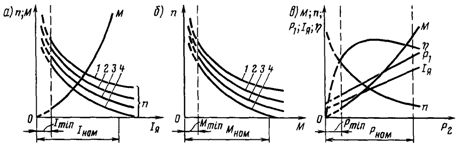
Рис. 4. Характеристики электродвигателя постоянного тока с последовательным возбуждением: а — скоростные и моментная, б — механические, в — рабочие.
Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rpв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 3, б).
При токе обмотки якоря Iя, меньшем (0,8—0,9) номинального тока Iном магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току Iя. Поэтому скоростная характеристика электродвигателя будет мягкая — с увеличением тока Iя частота вращения n будет резко уменьшаться (рис. 4, а). Уменьшение частоты вращения n, происходит из-за увеличения падения напряжения IяΣRя. во внутреннем сопротивлении Rя. цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока Iя будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току Iя. Поэтому при токе Iя, меньшем (0,8 Н- 0,9) Iном, скоростная характеристика имеет форму гиперболы, а моментная — параболы.
При токах Iя > Iном зависимости М и п от Iя линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока Iя меняться не будет.
Механическая характеристика, т. е. зависимость n от М (рис. 4, б), может быть построена на основании зависимостей n и М от Iя. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rn1, Rn2 и Rn3, при этом чем больше Rn, тем ниже располагается характеристика.
Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).
Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2 …. 0,25) Iном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой), применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.).
Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением, поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости n и М от мощности Р2 на валу электродвигателя (рис. 4, в), как следует из рассмотренных выше положений, являются нелинейными, зависимости P1, Iя и η от Р2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
Электродвигатель постоянного тока со смешанным возбуждением
В этом электродвигателе (рис. 5, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя

где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя, Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 5, б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2 (кривая 4 при малой м. д. с. параллельной обмотки).
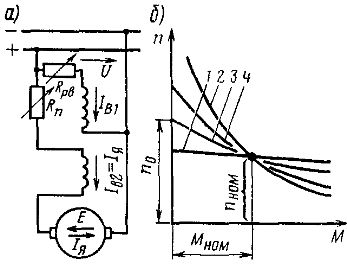
Рис. 5. Принципиальная схема электродвигателя со смешанным возбуждением (а) и его механические характеристики (б)
Достоинством двигателя постоянного тока со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл=0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).
Схема Электрическая Принципиальная Асинхронного Двигателя
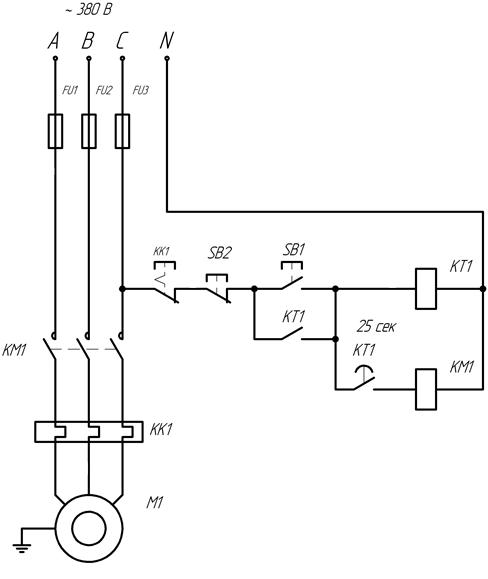
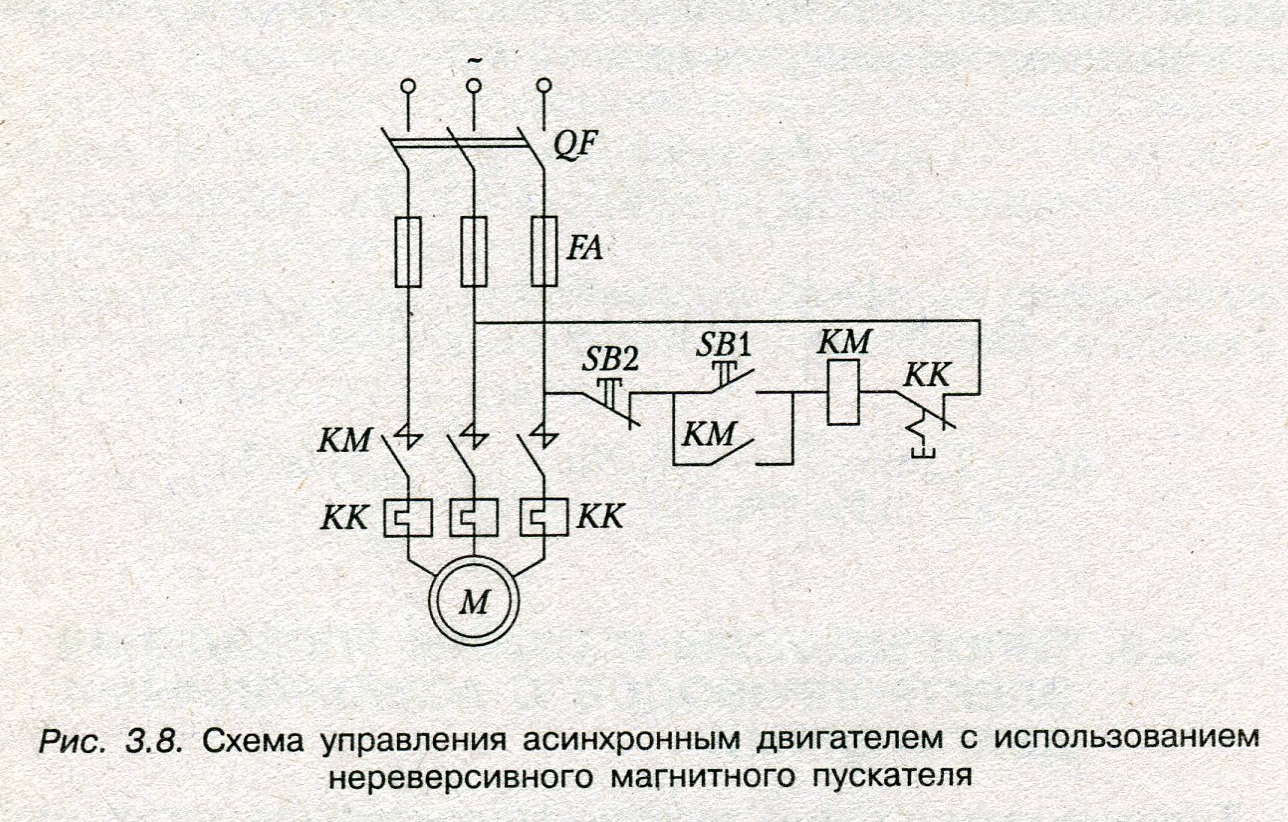
Схема используется для привода механизмов, не требующих реверса, длительность торможения которых после отключения двигателя не имеет существенного значения.

И если Вас не затруднит, ответ пишите на xnnn tut. 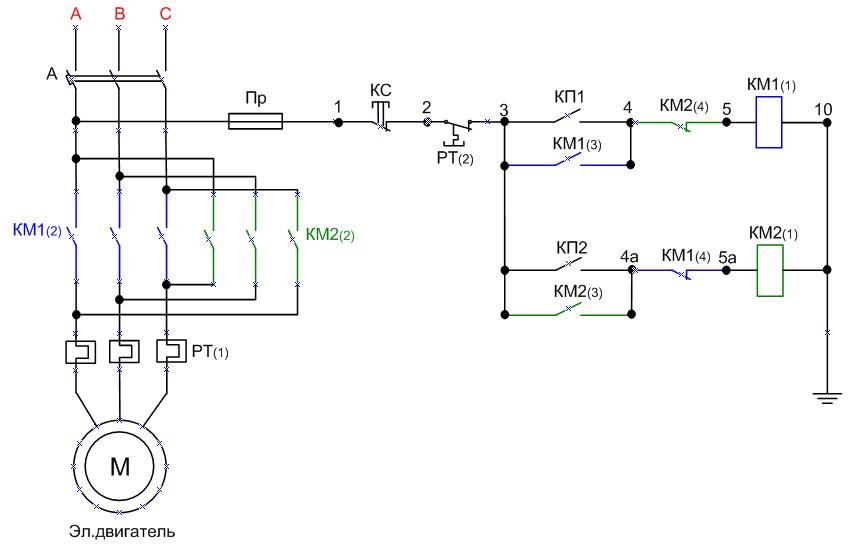
Поскольку вращающееся магнитное поле отсутствует, то и ротор останется неподвижным, ибо нет сил, приложенных к нему для начала вращения. Для повышения надежности работы релейных контакторных аппаратов, большей частью рассчитанных на низкое напряжение, и для повышения безопасности эксплуатации применяются схемы с питанием цепей управления от источника пониженного напряжения.
Вентилятор напольный, китайский. Ремонт, схема, параметры.

Схемы управления асинхронным двигателем с короткозамкнутым ротором с реверсивным магнитным пускателем.
Трехфазный переменный ток Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии.

Схема включает блок управления тиристорами БУ и релейно-контактный узел управления. Поскольку вращающееся магнитное поле отсутствует, то и ротор останется неподвижным, ибо нет сил, приложенных к нему для начала вращения.
Двигатель вращается расторможенным.
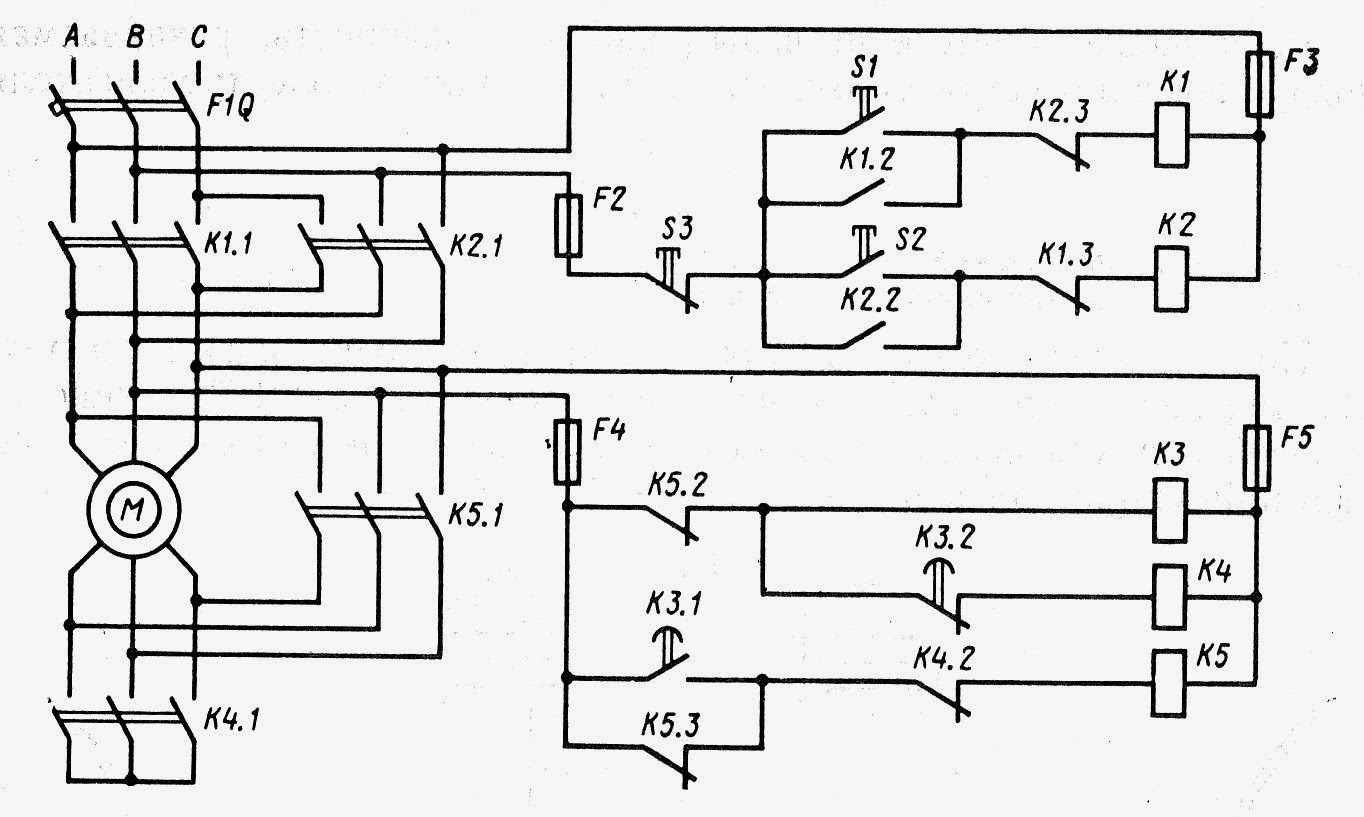
Тиристоры выполняют роль силовых коммутаторов и, кроме того, легко позволяют осуществлять необходимый темп изменения напряжения на статоре двигателя регулированием угла включения тиристоров. Наиболее часто в станках, установках и машинах применяются три электрические схемы: схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок «пуск» и «стоп», схема управления реверсивным двигателем с использованием двух пускателей или одного реверсивного пускателя и трех кнопок.
Нетрадиционное подключение асинхронного двигателя.Правда или миф.
Устройство двигателя
В перпендикулярной плоскости, представленной магнитопроводом, вокруг проводника возникают магнитные потоки Ф. По ней проходит переменный синусоидальный ток, имеющий положительные и отрицательные полуволны. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. 
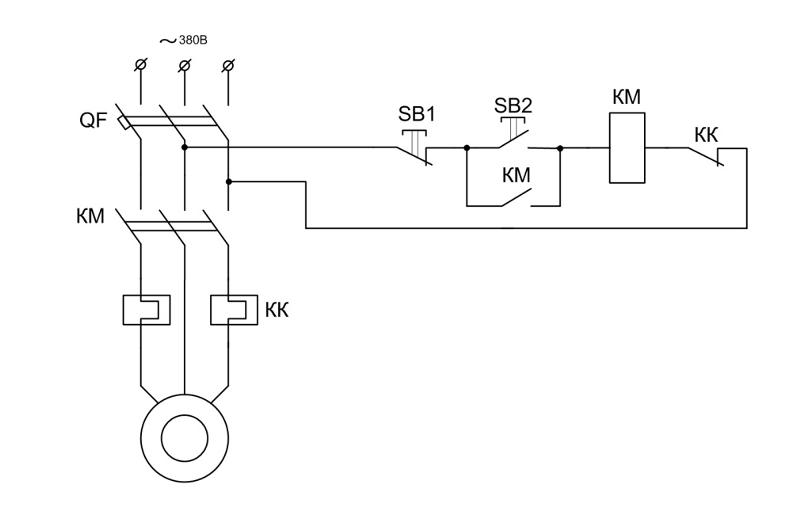
В этих схемах вместо установки на вводе рубильников с предохранителями применяют воздушные автоматы. Динамическое торможение, в отличие от торможения противовключением и фрикционного метода, является плавным, мягким торможением. masters/2007/fema/rudenko_y/library/art8/ris1.gif»/>
Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. 
Кнопка S2 освобождается и принимает исходное положение, контактор К2М обесточивается, контакты К2 1—2 М размыкаются. Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, так как ток в этом случае идет через блокировочный контакт. 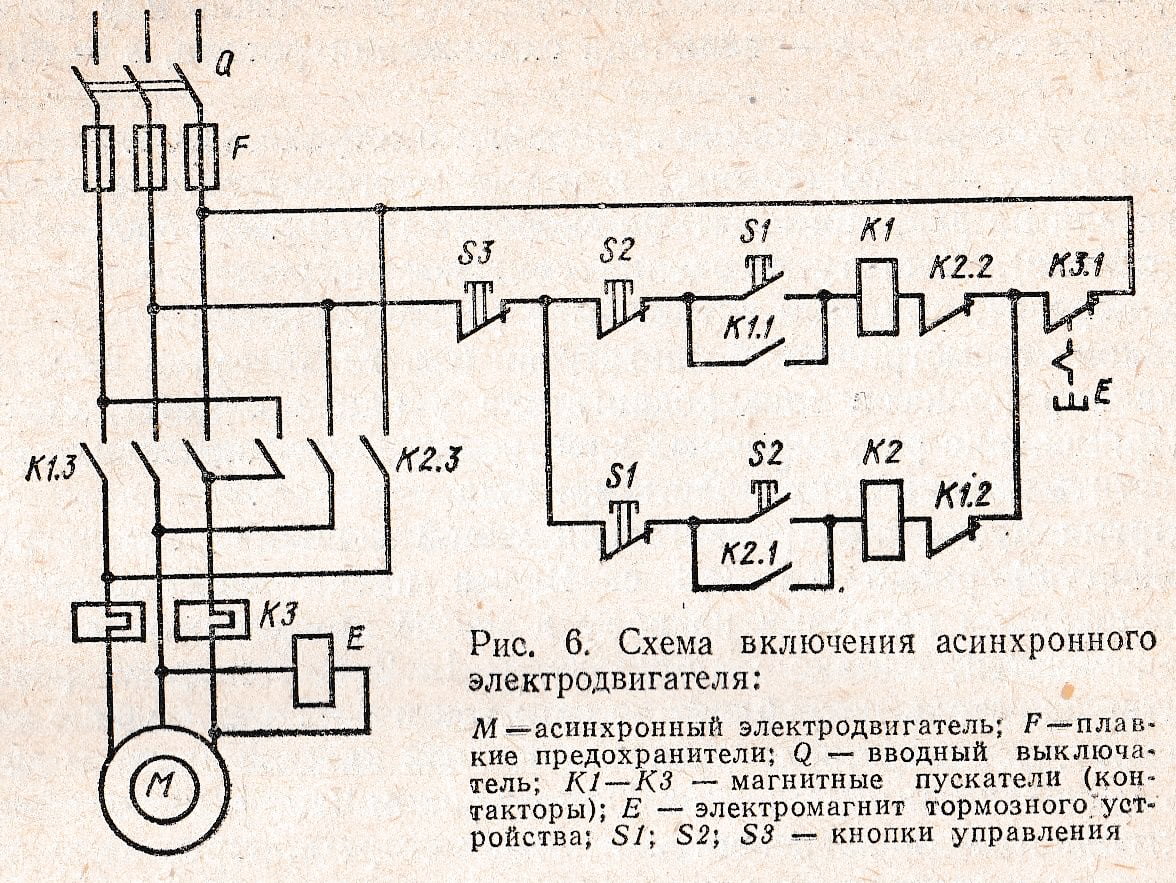
Поэтому для защиты электродвигателей от длительных перегрузок при использовании автомата с электротепловым расцепителем такого типа применяются дополнительные электротепловые реле, как и при использовании автоматического выключателя с электромагнитным расцепителем. 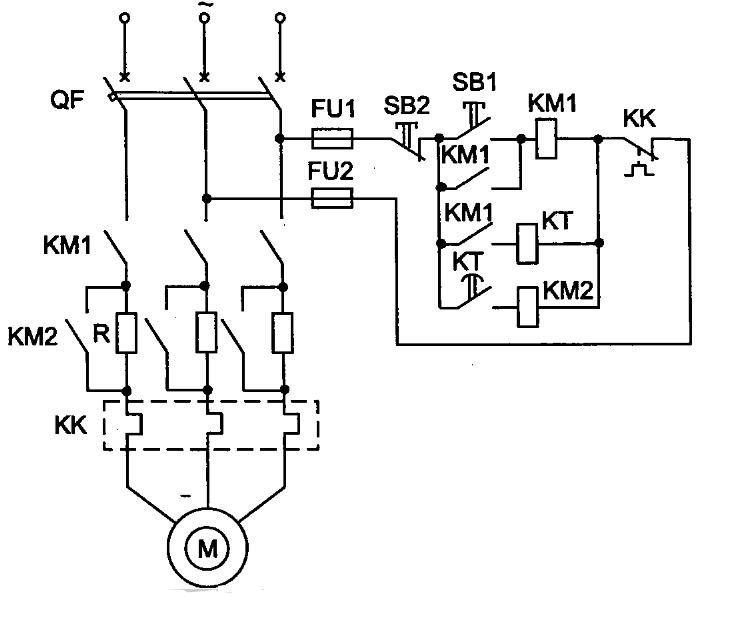
Одновременно закроется вспомогательный контакт K1A. Схема подключения такого двигателя показана на рисунке справа. 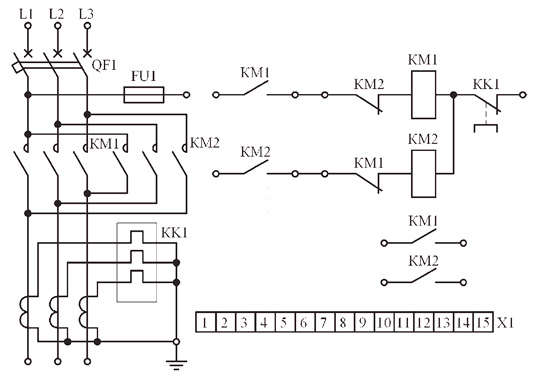
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. Пользователей: Устройство однофазного асинхронного двигателя Однофазные асинхронные двигателя выпускают от 5Вт до 10кВт.
Определение схемы обмоток и рабочего напряжения асинхронного электродвигателя
9 комментариев
Изготовление таких электродвигателей производится в очень широком диапазоне мощностей, где номинал устройства может составлять всего лишь несколько ватт, а может иметь мощность и в десятки мегаватт. Разберем принцип работы всех этих схем. 
Типовые схемы разомкнутых систем управления электродвигателями 
После размыкания контакта реле времени РДТ схема приходит в исходное состояние, двигатель плавно останавливается. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя из двигателя выходит три провода , выведены наружу выходит шесть проводов , выведены в распределительную коробку в коробку выходит шесть проводов, из коробки три. 
Буду знать, куда зайти, если нужна будет информация по запуску двигателя. При неподвижном роторе магнитные поля Фа и Фв создают одинаковые по величине, но противоположны по знаку крутящиеся моменты М1 и М2. Обмотка создает неподвижный в пространстве магнитный поток. 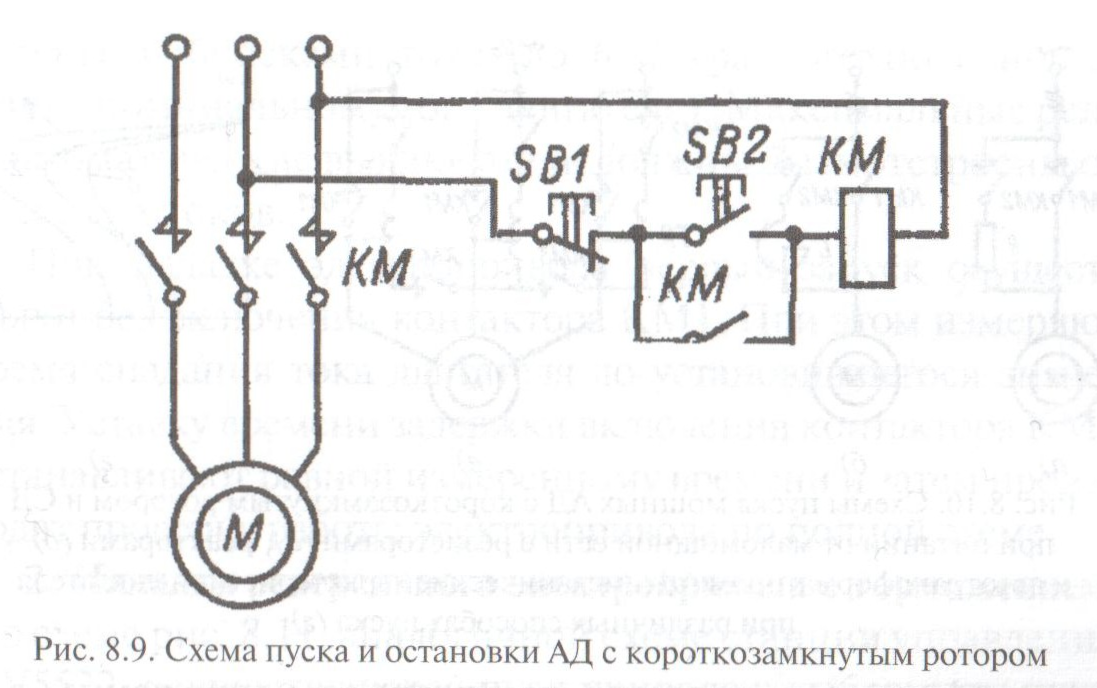
Во время преодоления однофазным двигателем номинальной нагрузки создается небольшое скольжение с основной долей прямого крутящего момента Мпр. В этом случае используются электромагнитные пускатели с катушками на напряжение , 48, 36 или 24 В. Основными положительными характеристиками короткозамкнутых асинхронных электродвигателей являются их высокая надежность, незначительная масса, компактность, более высокий срок службы, чем у двигателей внутреннего сгорания аналогичной мощности. Такая схема изображена на рис.
Реостатный пуск асинхронного двигателя с кз ротором.

Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. Анимация процессов, протекающих в схеме показана ниже. Рассмотренная схема является основой построения схем управления электродвигателями двухскоростных транспортеров подачи раскряжевочных агрегатов, сортировочных конвейеров и т.
Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Схема подключения двигателя по реверсивной схеме.
Эти двигатели просты в устройстве, обслуживании и ремонте. Запустить Вращающееся магнитное поле пронизывающее короткозамкнутый ротор Магнитный момент действующий на ротор Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Привод может иметь две скорости. По этому возможно нужно использовать какое-то устройство для плавного запуска, чтобы избавиться от пусковых токов. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента.
схемы включения асинхронного двигателя
Особенности электрических двигателей
Такая схема показана на рис. Это энергия рассеивается как тепло.
Поэтому контактор К2М в этот период не включается. Шаговый режим работы двигателя создает благоприятные условия наладки.
Фазное напряжение — разница потенциалов между началом и концом одной фазы. При замыкании контакта К1А.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием магнитного пускателя и воздушного автоматического выключателя. Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Нереверсивная схема управления асинхронного двигателя.
Они во многом играют важную роль, например, подшипники качения, обеспечивают возможность плавности хода, корпус защищает от механического воздействия на основные рабочие части, вентилятор обеспечивает обдув двигателя и отвод тепла, выделяемого при работе, но на принцип преобразования электрической энергии в механическую не влияют. Применение синхронных электродвигателей не допускает частых пусков, поэтому, как правило, их используют в условиях относительно неизменной нагрузки, при необходимости обеспечения постоянной скорости вращения. Реверсивный пуск асинхронного двигателя с короткозамкнутым ротором Такая схема запуска приведена на рис.
Это позволяет проводить смену инструмента, наладку станка с легким поворотом приводного вала и ротора электродвигателя. Особенности электрических двигателей Устройство синхронных электродвигателей очень напоминает синхронный генератор. Изменение направления вращения реверс ротор двигателя меняет при изменении порядка чередования фаз на его статоре.
Главные вкладки
Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения. Применение двухцепных кнопок позволяет осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов K1 и К2, а также К3 и К4. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, так как какой-либо из пускателей при нажатии на обе кнопки «Пуск» включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя. Поэтому Д2М не сразу включится и его размыкающий контакт Д2А. Электродвигатель подключается к сети при помощи кнопки S1, контакта K1A и силовых контактов К1 1—3 М.
Реверсивная схема подключения электродвигателя Как изменить направление вращения электродвигателя? Обычно реверсивный магнитный пускатель состоит из двух контакторов, заключенных в один корпус. Двигатель вращается расторможенным. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. В частности, на базе этой схемы создаются схемы управления главным электродвигателем лесопильных рам.
Реверсивная схема подключения магнитного пускателя