Собрать управление шаговыми двигателями
Материал перевел и подготовил RA3TOX (сайт «Радиофанат»)
 В данной статье описывается простой способ ручного управления четырехполюсным однополярным шаговым двигателем. Для этого необходим галетный переключатель, восемь недорогих выпрямительных диодов и несколько других компонентов.
В данной статье описывается простой способ ручного управления четырехполюсным однополярным шаговым двигателем. Для этого необходим галетный переключатель, восемь недорогих выпрямительных диодов и несколько других компонентов.
Полная схема для ручного управления шаговым электродвигателем показана на рисунке 1. Поворачивая галетный переключатель S1 по часовой стрелке, шаговый двигатель вращается также по часовой стрелке. Поверните поворотный переключатель против часовой стрелки, а шаговый двигатель вращается против часовой стрелки. Поверните поворотный переключатель, и шаговый двигатель остановится с полным крутящим моментом (называемым удерживающим моментом). Это имитирует базовые функции управления, доступные со стандартного контроллера шагового двигателя — за исключением того, что ручной контроллер шагового двигателя работает полностью вручную. С помощью светодиода и геркона можно контролировать состояние двигателя, когда он завершит один полный оборот.

Рис.1. Схема устройства.
Возможные аврианты применения устройства — это позиционирование световых или вентиляционных отверстий, ручное вращение стрелок настенных часов, дистанционное управление роботами и роботизированными игрушками, видеокамерами. Для радиолюбителей возможно его применение в поворотных устройствах антенн, вращении конденсаторов в магнитных рамочных антеннах и т.п.
Четырехполюсный униполярный шаговый двигатель может, как правило, управляться четырьмя различными способами — каждый из которых имеет свои преимущества и недостатки:
- Управление волной (Wave control) — это самая простая форма управления, так как она возбуждает только одну обмотку (или фазу) за раз. Его главный недостаток — плохой крутящий момент.
- Полношаговое управление (Full-step control) — это простое средство управления с хорошим крутящим моментом, использующее одновременно две обмотки двигателя.
- Полушаговое управление (Half-step control) . Это более сложная форма управления,имеющая по сравнению с предыдущим методов в два раза больше шагов. Он имеет хороший крутящий момент и стабилизирует работу двигателя. Однако этот метод не подходит при ручном управлении.
- Микрошаговый контроль (Micro-steppping control) — это комплексная форма управления со сложной схемой, которая обеспечивает бесчисленные «промежуточные шаги» и высокую точность. Он часто используется в промышленности.
Для наших целей нам лючше всего подходит полношаговый контроль, так как он прост в реализации и имеет хороший крутящий момент. Для этого необходимо, чтобы 4-х битная управляющая последовательность двигалась вправо или влево по обмоткам шагового двигателя. Однополюсный четырехпозиционный галетный переключатель будет выполнять эту задачу с помощью мультиплексирования восемью диодами. Однако, поскольку такие переключатели обычно не имеют вращения на 360 градусов, вместо них используется тройной четырехпозиционный переключатель.
Следует отметить, что стандартный переключатель здесь не подходит , так как в момент переключения происходит кратковременная потеря питания на выводах двигателя во время вращения, что неблагоприятно скажется на крутящем моменте, особенно, если мотор установлен вертикально. Поэтому здесь используется переключатель ( make-before-break rotary switch ), который создает новый контакт перед тем как разорван предыдущий. Контакты переключаются как-бы в нахлест. Электролитический конденсатор C1 сглаживает мгновенный всплеск напряжения, когда переключатель перемещается. Если не требуется удерживающий крутящий момент, цепь питания может быть отключена, как только шаговый двигатель достигнет нужного положения. Момент затяжки (остаточный крутящий момент, когда шаговый двигатель выключен) обычно составляет одну десятую от состояния удержания крутящего момента. Красный светодиод. D9 указывает наличие питающего напряжения (состояние выключателя S3 — On/Off ).
Идентификация обмоток двигателя
Как известно, нет стандартного цветового кодирования для идентификации проводов четырехфазного униполярного шагового двигателя. Автор опробовал шесть шаговых двигателей, из которых только два имели одинаковую цветовую маркировку проводов! Такие двигатели иногда имеют пять выводов, иногда шесть, а иногда и восемь выводов (для каждой из четырех обмоток). К счастью, задача идентификации не слишком сложна. Первый шаг — найти общий провод или выводы. Шестивыводный четырехобмоточный шаговый двигатель имеет два общих провода, которые, скорее всего, находятся в центре двух рядов по три (они часто используются в принтерах или факсимильных аппаратах). Пятипроводный двигатель имеет один общий вывод. Эти двигатели обычно используется в 5-дюймовых дисководах.
Обмотки легко протестировать с помощью мультиметра: Если имеется шесть проводов — измерьте сопротивление на всевозможные комбинации выводов (например, зелено-белое, зелено-красное, бело-красное . ). Большое сопротивление указывает на последовательное соединение двух обмоток, а малое на отдельную обмотку. Когда определите центральные выводы — соедините их вместе.
В случае пяти проводов, находим только один провод, при котором измеряются самые низкие сопротивления. Это и будет общий провод.
Большинство четырехполюсных однополярных шаговых двигателей питаются напряжением 12 вольт или что-то около этого. Рекомендуется использовать регулируемый источник питания на 12 В, так как нерегулируемое питание может существенно повышаться 12 В, что может привести к чрезмерному нагреву двигателя или даже к перегоранию. Источник питания должен обеспечить мощность 6 Вт или 500 мА для небольших двигателей (диаметром от 3 до 4 см).
Следующим шагом является подключение общего провода двигателя к положительной клемме источника питания 12 В. Теперь возьмите отрицательный провод источника 12 В и поочередно подключите его к четырем выводам в различных последовательностях. После того, как вы нашли последовательность, которая продвигает двигатель небольшими шагами по часовой стрелке, обозначьте эти провода от А до D. То, что вы только что достигли — это управление волной (Wave Control), см. Таблицу 1.
Таблица 1: Wave Control
Наконец, обмотки А-D должны быть под напряжением в последовательности, которая показанная в таблице 2, и которая является полношаговым управлением (Full-step Control).
Таблица 2: Full-step Control
Таблица, нарисованная здесь, является наиболее логически последовательным способом, и вы сможете оценить смещение двоичной последовательности 1-0-0-1 по проводам шагового двигателя.
Графическое подключение обмоток (или фаз) от А до D показано на рисунке 2.

Рис.2 Униполярный привод.
Устройство собрано на макетной плате. Элементы переключения — галетник и тумблер включения питания монтируются на передней панеле прибора. Также на корпусе прибора установлено гнездо для подключения источника питания.


Рис.3. Компоновка элементов.
На галетном переключателе необходимо убрать ограничитель перемещения ползунка, чтобы он проворачивался по кругу.
В конструкции использованы резисторы мощностью 0.25W 5%, электролитический конденсаторы 1000 мкф на 16 В. Полупроводниковые диоды D1. D8 типа 1N4001 50V 1A . Светодиод D9 — 5 мм красный, D10 — 5 мм зеленый. Для контроля оборотов используется маленький магнит, который устанавливается на подвижной планке, закрепленной на валу шагового двигателя. Геркон фиксируется в подходящем месте и будет замыкаться в момент прохождения около него магнита.

Рис.4. Размещение элементов в корпусе.
В случае использования мощного шагового двигателя рекомендуется увеличить емкость электролитического конденсатора. При этом понадобится и более мощный исочник питания.

Хотя большинство 12 вольтовых однополярных шаговы двигателей рассчитаны на непрерывное питание, они могут достаточно ощутимо нагреваться. Если полный крутящий момент не требуется, простым решением является установка 15-омного проволочного резистора в одну из линий питания обмоток.
Тяговое усилие маленького четырехфазного униполярного шагового двигателя довольно сильно ощущается пальцами, и такие двигатели могут найти большое применений. Как видите, затраты на изготовление такого привода во много раз меньше, чем у обычной системы управления шаговым двигателем на микроконтроллерах или микросхемах. Примечание от RA3TOX.
На мой взгляд, самый дефицитный элемент в этом приводе — это галетный переключатель. Можно попытаться найти его на AliExpress по названию » make-before-break rotary switch » или переделать (расширить) подвижную пластину стандартного галетника. Есть керамические галетник с широким контактом, как показано на левом рисунке. На среднем рисунке галетник с узким коммутирующим контактом (самый распространенный вариант). Проще всего переделать контакты на коричневых открытых галетниках (правый рисунок). Из представленных образцов наиболее применим средний галетник (2 направления на 5 положений), но надо поискать такой с широким ползунковым контактом, при этом два крайних положения 4 и 5 следует замкнуть.



Несколько конструкций переключателей.
Собрать управление шаговыми двигателями
Пропорциональное управление шаговым двигателем
Автор: МКС, uels73@mail.ru
Опубликовано 14.08.2013
Создано при помощи КотоРед.
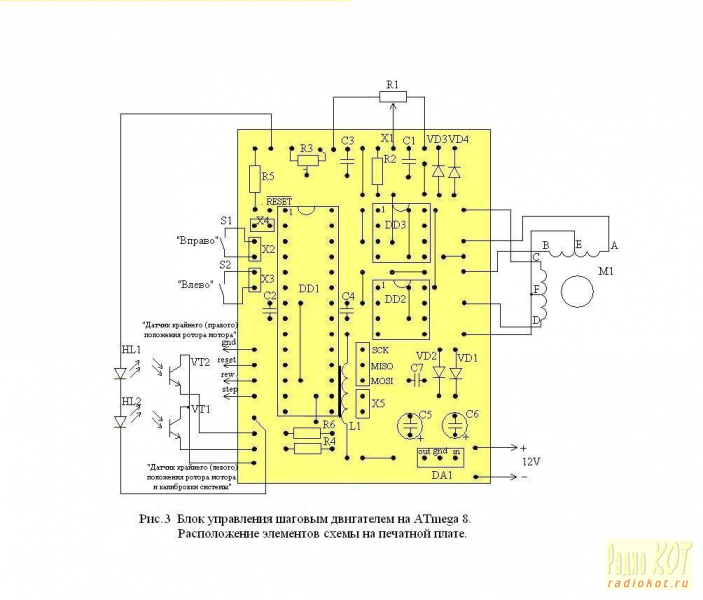
Описываемое ниже устройство позволяет управлять униполярным шаговым двигателем типа СДХ 1,8/40 и аналогичным. Схема электрическая принципиальная блока управления изображена на рис.1. Он выполнен на базе микроконтроллера ATmega 8 работающего от встроенного тактового генератора на частоте 2 МГц. В качестве ключей, коммутирующих обмотки шагового двигателя М1, использованы логические элементы микросхем DD2, DD3 типа SN75452 (русский аналог — К155ЛА18). Это микросхемы – повышенной мощности с открытым коллекторным выходом.
Блок поддерживает пропорциональное и дискретное управление мотором. В режиме пропорционального управления — угол поворота ротора двигателя, задается переменный резистором R1. В режиме дискретного управления — вращение двигателя «влево», «вправо», «стоп» осуществляется кнопками S1 и S2. Кроме этого, в схеме можно выбирать шаговый или полушаговый режим работы, а также скорость вращения двигателя.
Установкой перемычки X4 выбирается пропорциональное управление, а при ее отсутствии – дискретное управление. Перемычкой X5 определяется шаговый и полушаговый режим работы двигателя. Все эти режимы работы инициализируются только в момент включения схемы или сброса микроконтроллера. Поэтому нужные перемычки необходимо установить перед включением питания. В микроконтроллере задействованы два канала АЦП. На вход одного из них – ADC5 (28 ножка) подключен подстроечный резистор R3. С его помощью регулируется скорость вращения двигателя при любом режиме работы схемы.
В режиме пропорционального управления задействуется еще один канал АЦП – ADC4 (27 ножка). На его вход через интегрирующую цепь R2, C1 подключен переменный резистор R1, который задает угол поворота ротора мотора. Скорость работы АЦП в данной управляющей программе осуществляет преобразования с 8 — битной точностью. Поэтому положение ручки переменного резистора R1 программа контроллера условно разбивает на 255 шагов. После включения питания, программа выполняет калибровку положения ротора шагового двигателя. Для этого, перед началом работы, автоматически выполняется команда «вращение двигателя влево» до тех пор, пока флажок, закрепленный на роторе мотора, не «доедет» до концевого датчика (оптопары) VT1, HL1. При поступлении сигнала с датчика VT1, программа обнуляет регистр-счетчик количества шагов двигателя, измеряет напряжение на выходе переменного резистора R1, преобразует его в цифровой код в диапазоне от 0 до 255, записывает его в старший байт регистра результата преобразования АЦП (это количество шагов переменного резистора R1), а затем сравнивает его содержимым регистра-счетчика количества шагов двигателя. Если число шагов резистора R1 больше чем шагов двигателя М1, то выдается команда: «вращение двигателя вправо». При этом с каждым шагом ротора происходит инкремент счетчика шагов двигателя и его сравнение с числом в регистре АЦП (шаги резистора R1). Когда число шагов двигателя станет равно числу в регистре АЦП, выполняется команда: «стоп». Поворачивая ручку резистора R1 «влево», уменьшается уровень постоянного напряжения на входе АЦП. При этом число в регистре результата преобразования АЦП станет меньше чем текущее значение регистра — счетчика шагов. В этом случае выдается команда: «вращение двигателя влево». С каждым шагом двигателя происходит декремент регистра-счетчика шагов двигателя до тех пор, пока числа в обоих регистрах не станут равны. Таким образом, вращая ручку переменного резистора R1, ротор двигателя поворачивается в том же направлении и на такое же количество шагов.
Отмечу, что предлагаемый двигатель совершает один оборот на 360° за 200 шагов (т.е. один шаг – 1,8 град.). Следовательно, в данной схеме, за 255 условных шагов от переменного резистора R1, ротор мотора сделает более одного оборота и повернется на угол 459°. Поэтому для ограничения угла поворота двигателя используется концевой датчик (оптопара) для крайнего правого положения ротора. Он выполнен на элементах VT2, HL2. Для более точного копирования угла поворота ручки переменного резистора ротором двигателя необходимо установить в разрыв вывода сопротивления R1, подключенного к «+5 В», ограничительный резистор Rогр.. Его номинал следует тщательно подобрать (в пределах от 1 до 3 кОм).
В управляющей программе предусмотрена функция повторной калибровки положения ротора двигателя в процессе работы устройства. Например, в случае проскальзывания шагов ротора, по какой либо причине (двигатель перегружен, зацепился за что-то и т.д.), можно повернуть ручку переменного резистора R1 в крайнее левое положение и подождать 2 — 3 секунды. При этом происходит проверка положения флажка ротора с помощью оптического датчика крайнего левого положения VT1. Если флажок не зашел в зону срабатывания датчика, значит в процессе работы произошло смещение шагов ротора мотора М1 относительно шагов резистора R1. В этом случае запускается программа повторной калибровки системы, и работа устройства восстанавливается.
Для работы схемы в режиме пропорционального управления оптический датчик крайнего левого положения и калибровки VT1 — обязателен. Датчик крайнего правого положения VT2 можно не ставить, если нет необходимости в ограничении положения ротора при вращении вправо. Но, тогда, необходимо 14 вывод микроконтроллера подключить к +5 В.
При пропорциональном управлении двигателем в полушаговом режиме ротор совершает поворот в пределах от 0° до 230°. Мощность мотора уменьшается, зато увеличивается плавность хода. Это необходимо учитывать при выборе этого режима работы.
В режиме дискретного управления вращение «вправо» осуществляется кнопкой S1, вращение «влево» — кнопкой S2. Если кнопки не нажаты, выполняется команда «стоп». Программа калибровки двигателя и переменный резистор R1 в этом режиме не используются. Оптические датчики VT1, HL1 и VT2, HL2 работают как ограничители крайних положений ротора двигателя М1. Если ограничение вращения не требуется, то эти оптопары можно не ставить. Но при этом необходимо выводы 14, 15 микроконтроллера припаять к +5В.
В случае необходимости контроля над работой шагового двигателя другими (внешними) устройствами, в схеме предусмотрены специальные выходы на старших пинах порта D микроконтроллера. На выводе PD7 «step» формируется кратковременный импульс прямоугольной формы при каждом шаге двигателя (может пригодиться для внешнего счетчика шагов). Вывод PD6 «rewers» – сигнал реверса двигателя (лог. 0 — вращение вправо, лог. 1 – вращение влево). При обнулении (сбросе) программного счетчика — регистра количества шагов, на выводе PD5 формируется кратковременный импульс «reset». Эти выходы работают и в режиме пропорционального управления.
Управляющая программа для микроконтроллера написана на языке Ассемблер. Файл прошивки прилагается. Кроме этого, необходимо запрограммировать фьюзы: CKSEL0=0, CKSEL1=1, CKSEL2=0, CKSEL3=0, SUT0=0, SUT1=1, SKOPT=1.
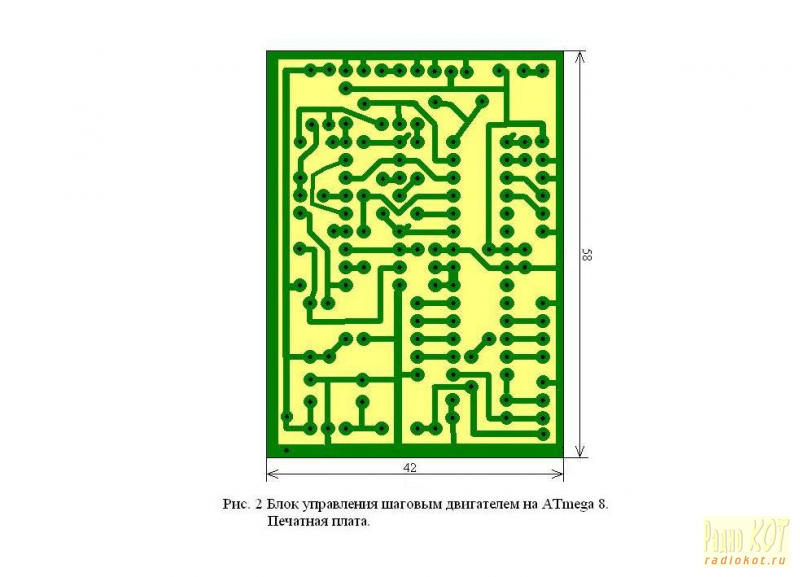
Печатная плата блока управления изображена на рис. 2. Она изготовлена из одностороннего фольгированного стеклотекстолита размерами 42 × 58 мм. В прикрепленном файле с расширением .lay прилагается рисунок для «лазерно-утюжной» технологии изготовления платы. Расположение элементов схемы на печатной плате приведено на рисунке 3.
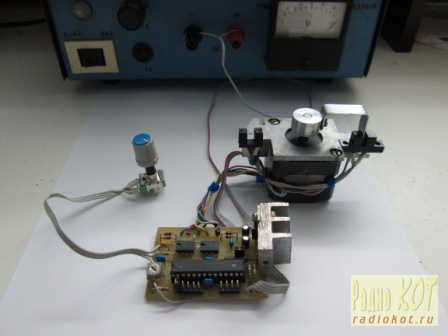
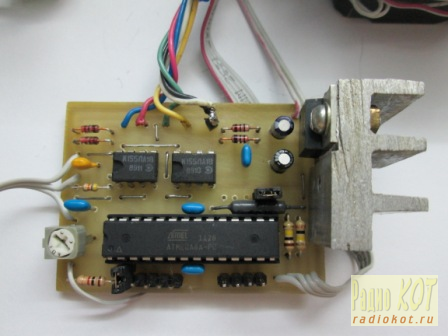
После установки микросхемы – стабилизатора DA1, к ней, необходимо прикрутить радиатор площадью не менее 4 см². Собранная конструкция представлена на фото. 1 и фото. 2.
Как уже отмечалось, логические микросхемы SN75452 можно заменить русским аналогом — К155ЛА18. Раньше они использовались в старых пятидюймовых флоппи дисководах вместе с предлагаемым шаговым двигателем.
Предлагаемый блок может быть использован в различных устройствах с электромеханическим приводом. Например, у меня два таких модуля с шаговыми двигателями пропорционально управляют видеокамерой наблюдения с удаленным доступом по двум осям координат. Один мотор поворачивает камеру по оси Х, другой – по оси Y (фото. 3).
Видеоролик о работе девайса: