Симистор схема для включения двигателя
Многообразие материалов на эту тему практически не оставляет шансов на оригинальность, но кое-что можно представить, дабы сократить время на поиск нужных решений и обозначить «подводные камни». И прежде всего представить практическое, без академичности, которая векторными диаграммами управления и матрицами отпугивает многих, а привлекает только тех, кому нужен реферат потолще.
Необходимо отметить, что выбор индуктивной нагрузки, коей является двигатель, вовсе не отвергает данное решение для управления освещением или нагревательными элементами. Двигатель, достаточно капризный элемент и не всякий подходит для данной схемы. И более того, режим плавного управления мощностью двигателя не всегда удается осуществить. Это зависит от многих факторов: мощность двигателя, инерционность нагрузки на валу, реактивные и активные параметры обмоток. Для надёжного решения всех этих проблем предназначены частотные инверторы. Тем не менее, данная схема значительно проще по сложности, чем частотное управление и иногда обеспечивает приемлемые результаты.
Вот совокупность всех аспектов проблемы управления:
- Прежде всего, слово «микроконтроллер» в заглавии статьи, говорит о том, что управлять нагрузкой необходимо не потенциометром, (таких решений предостаточно), а именно микроконтроллером.
- Обязательное наличие гальванической развязки.
- Плавное управление мощностью, а не старт-стопное.
- Контроль перехода через ноль (Zero-Cross).
- Некоторые особенности выбора сглаживающего фильтра RC snubber.
- Программная реализация событий управления на примере Atmega16A.
- Обзор аналогичных решений в Интернете.
Схема 1. Узел управления нагрузкой.
Схема 2. Датчик перехода через ноль (Zero-Cross).
Цепи:
- VCC – 5 вольт, питание низковольтной части узла, полученное стабилизатором напряжения;
- GND – общая точка низковольтной части;
- DRV – выход микроконтроллера, для управления нагрузкой (PC6 для Atmega16A);
- ZERO — вход TTL-сигнала (PD2/INT0 для Atmega16A) от события перехода через ноль сети 220;
- L,N — фаза и нейтраль сети 220;
Элементы:
- MOC3052 — оптотриак (симистор), обеспечивающий гальваническую развязку;
- BT136 — триак (симистор), обеспечивающий управление мощной нагрузкой;
- BC847 – транзистор, управляющий MOC3052;
- R1,R2 – делитель, запирающий транзистор по умолчанию.
- RS,CS — сглаживающий фильтр RC snubber, необходимый только для индуктивной нагрузки.
- PC814 — оптрон датчика Zero-Cross;
- RZ0,RZ1 — токозадающие резисторы, двухваттные;
- SN74HC14D – триггер Шмидта, для повышения помехоустойчивости;
- М — двигатель, схема включения типа «звезда»;
- CF — фазосдвигающий конденсатор.
Диаграмма фазового управления.
Оптрон PC814 обладает той особенностью, что содержит два внутренних светодиода, и реагирует на разнополярное напряжение при токе 10 мА. Поэтому характер импульсов сигнала ZERO именно такой, как показано на диаграмме. На токозадающих сопротивлениях RZ0 и RZ1 падает практически всё напряжение питающей сети, поэтому на их ваттности не надо экономить. Вместо двух последовательных сопротивлений можно использовать одно, соответствующего типа.
Сигнал ZERO попадает на микроконтроллер PD2/INT0 и вызывает аппаратное прерывание ниспадающим фронтом. Как будет показано далее, программа обработки прерывания запускает счетчик, время работы которого и будет определять фазовую задержку включения симистора относительно события перехода через ноль. Сигнал DRV формируется этой задержкой. На диаграмме показано, что передний фронт сигнала DRV смещается так, что энергетика на нагрузке уменьшается синхронно, через каждые 10 миллисекунд. Этого можно достичь только программным способом.
Если задача управления нагрузкой простая (включить/выключить) , то датчик Zero-Cross можно и не применять. Однако его использование уменьшает помехи при коммутации сильноточной нагрузки, да и режим, в котором пребывает силовой симистор более щадящий и он меньше нагревается. Используя данный подход в полном объеме, можно строить достаточно сложные воздействия на двигатель.
В представленной схемотехнике имеется один не большой «подводный камушек», о который можно споткнуться. При инициализации микроконтроллера может пройти достаточное время, это связано с конкретной задачей, когда его выходные сигналы находятся в третьем состоянии. В течении этого времени необходимо запереть транзистор BC847. Иначе возможен скачек напряжения, который пройдет на нагрузку.
Сглаживающий фильтр RC-snubber.
Необходимо иметь в виду, что при отключении и включении симистора из-за реактивного сопротивления обмоток может возникать короткий бросок и даже затухающие колебания на нагрузке. Для предотвращения этих бросков служит фильтр RS, CS. В литературе по триакам приводятся номиналы этих элементов: RS = 39 Ом, CS = 0.01 мкФ. При этом для мощности RS нет рекомендаций. Мой практический опыт говорит о том, что сопротивление RS горит так, что выгорает весь узел с симистором. При этом оборудование испытывалось, собственные колебания подавлены, работа стабильная, но иногда у заказчика происходит пробой узла. Причины этих возгораний носят случайный характер и систематизации не поддаются. Можно только предположить, что причиной может быть не сам узел симистор – двигатель, а наводимая на него через питающую сеть импульсная помеха от другого оборудования.
И так, для подавления собственных колебаний представленные номиналы вполне оправданы, и вообще-то не критичны. RS должно быть того же порядка, что и активное сопротивления двух обмоток (схема «звезда»). Собственные колебания могут быть от 1 до 10кГц. На этой частоте реактивное сопротивление CS от 16кОм до 1.6кОм, поэтому всё напряжение приложено к CS. Гораздо хуже, когда возникает внешняя импульсная помеха, её параметры не известны.
Поэтому мои рекомендации таковы:
RS эквивалентно активному сопротивлению обмоток, а мощность не менее двух ватт. CS большего номинала чем 0.01 мкФ, с напряжением 400V и более.
Вот здесь есть интересные материалы на эту тему:
Программная реализация управления.
Пример программы реализован в проекте AVR-studio Ver 4.18 build 716.
- Частота процессора 8 МГц внутренняя без кварца.
- Регистр счетчика TCCR2 настроен на внутреннее прерывание с периодом 20 мкс.
- Программа обработки этого прерывания SIGNAL(SIG_OUTPUT_COMPARE2) вызывает процедуру drv_act().
- Процедура drv_act() в зависимости от флага drv_faza0 запускает счетчик задержки относительно момента перехода через ноль.
- Процедура обработки прерывания SIGNAL (SIG_INTERRUPT0) от датчика Zero-Cross управляет флагом drv_faza0.
- Весь период полуволны в 10 мс разбивается на 500 значений задержки.
- В массиве pwm_array[] заранее формируется набор задержек. Перебор индекса массива происходит в программе обработки прерывания SIGNAL (SIG_INTERRUPT0).
Более подробно см. проект.
Ниже будет описано, что можно получить, манипулируя полуволнами, но автор, работая над реальным проектом управления двигателем, не ограничился статическими значениями задержек. Для более стабильного результата была реализована следящая система поддержания заданных оборотов двигателя на основе тахометра. Программно это поддержано в процедуре NormalCtrl(), но описания этой части не входит в рамки данной статьи.
Управление двигателем с помощью манипуляций полуволнами.
- Двигатель: асинхронный , 3 фазы, 250 Ватт, 220 В, 2730 об/мин, тип АИР56В2N3.
- Фазосдвигающий конденсатор CF = 10мкФ х 400 В.
- Активное сопротивление каждой обмотки Ra = 39 Ом.
- RS = 46 Ом, CS = 0.22 мкФ.
- Двигатель не нагружен, холостой ход.
- Напряжения снимались через резистивный делитель относительно нейтрали N.
На диаграммах 1,2,3 зелёный график – напряжение на нагрузке (LOAD), жёлтый график – точка между сопротивлением RZ1 и PC814, она показывает реальные моменты перехода через ноль.
При определённой задержке фазы включения симистора, близкой к той, что показана на диаграмме 1, наблюдалась устойчивая работа двигателя на оборотах в два раза меньше максимальных. Однако незначительное уменьшение этой задержки, приводило к тому, что двигатель, постепенно разгоняясь, выходил на полные обороты и симистор открывался полностью, игнорируя управляющее воздействие.
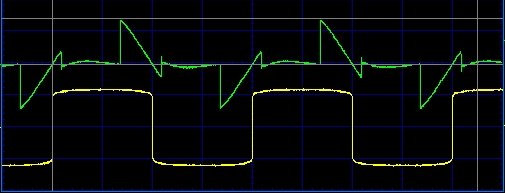
Диаграмма 1. Начало вращения, постепенный набор оборотов.
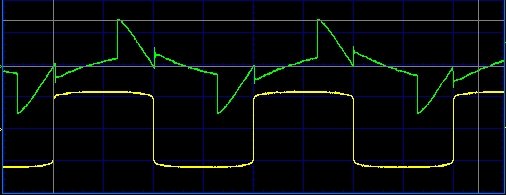
Диаграмма 2. Обороты, близкие к максимальным, вырождение участков закрытого симистора.
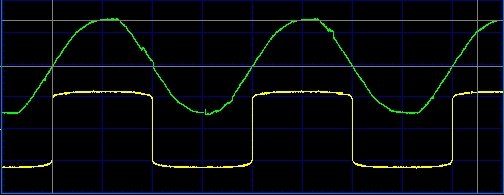
Диаграмма 2. Обороты максимальные, симистор открыт.
Можно предположить, что срыв работы симистора, как управляющего элемента, объясняется динамическим изменением реактивной составляющей сопротивления обмоток двигателя, в результате чего симистор переходит в открытое состояние. К этим сложностям добавляется то обстоятельство, что неустойчивость симистора так же зависит и от момента на валу двигателя. Если удалось подобрать фазы задержек на холостых оборотах, то при нагрузке для устойчивой работы эти параметры будут совершенно иными.
Однако же заставить работать двигатель на оборотах, кратных максимальным можно. Получить достаточно плавную регулировку, правда, не получится. Самое же проблематичное это получить вращение двигателя при оборотах в диапазоне 0.75MAX
Схемы регуляторов мощности (диммеров) на симисторах.
Принцип работы симисторных регуляторов мощности (напряжения) в цепях
переменного тока.
Что такое симистор, принцип его работы, а также справочные характеристики некоторых популярных приборов мы с Вами внимательно рассмотрели на странице  Ссылка на страницу.
Там же мы отметили, что симистор пришёл на смену рабочей лошадке-тиристору и практически полностью вытеснил его из электроцепей переменного тока.
Вспомним пройденный материал.
Отличительной чертой симистора является то, что при подаче на его управляющий электрод тока (напряжения), прибор переходит в проводящее состояние, замыкая нагрузку, причём проводит ток, независимо от полярности, приложенного к нагрузке напряжения.
Полярность открывающего напряжения должна быть либо отрицательной для обеих полярностей напряжения на условном аноде, либо совпадать с полярностью «анодного» напряжения (т.е. быть плюсовой в момент прохождения положительной полуволны и минусовой — в момент прохождения отрицательной).
Итак. Важным плюсом симисторных схем в электроцепях переменного тока является отсутствие выпрямительных устройств, и двухполюсность напряжения в нагрузке, что даёт возможность подключать их, помимо всего прочего, как трансформаторам, так и электродвигателям переменного тока.
Познакомимся с расхожими схемами симисторных регуляторов.
Для начала давайте рассмотрим простейшую, но вполне себе работоспособную схему симисторного регулятора мощности с фазово-импульсным управлением, позволяющего работать с нагрузками вплоть до 1200 Вт.
Рис.1
При замене симистора на другой, с большей величиной допустимого тока, мощность нагрузки можно увеличивать практически неограниченно.
А теперь — как это всё работает?
В начале действия положительного полупериода симистор закрыт. По мере увеличения сетевого напряжения конденсатор С1 заряжается через последовательно соединённые резисторы R1 и R2. Причём увеличение напряжения на конденсаторе С1 отстаёт (сдвигается по фазе) от сетевого на величину, зависящую от суммарного сопротивления резисторов и номинала ёмкости С1. Чем выше значения резисторов и конденсатора — тем больше сдвиг по фазе.
Заряд конденсатора продолжается до тех пор, пока напряжение на нём не достигнет порога пробоя динистора (около 35 В). Как только динистор откроется (следовательно, откроется и симистор), через нагрузку потечёт ток, определяемый суммарным сопротивлением открытого симистора и нагрузки.
При этом симистор остаётся открытым до конца полупериода, т.е. момента, когда полуволна сетевого напряжения приблизится к нулевому уровню.
Переменным резистором R2 устанавливают момент открывания динистора и симистора, производя тем самым регулировку мощности, подводимой к нагрузке.
При действии отрицательной полуволны принцип работы устройства аналогичен.
Диаграммы напряжения на нагрузке при различных значениях переменного резистора приведены на Рис.1 справа.
Для предотвращения ложных срабатываний триаков, вызванных переходными процессами в индуктивных нагрузках (например, в электродвигателях и обмотках трансформаторов), симисторы должны иметь дополнительные компоненты защиты. Это, как правило, демпферная RC-цепочка (снабберная цепь) между силовыми электродами триака, которая используется для ограничения скорости изменения напряжения (на схеме Рис.1 показана синим цветом).
В некоторых случаях, когда нагрузка имеет ярко выраженный ёмкостной характер, между силовыми электродами необходима индуктивность для ограничения скорости изменения тока при коммутации.
Существуют и различные модификации приведённой выше простейшей схемы диммера.
Рис.2
Дополнительная цепочка R3 C2 (Рис.2 слева) призвана увеличить максимально достижимый фазовый сдвиг между сетевым напряжением и напряжением, поступающим на левый вывод динистора, что в свою очередь позволяет производить более глубокую регулировку мощности, подводимой к нагрузке.
На схеме, приведённой на Рис.2 справа, цепь, образованная диодами D1, D2 и резистором R1, обеспечивает плавность регулировки при минимальной выходной мощности. Без неё характеристика управления регулятором имеет гистерезис, что проявляется в скачкообразном повышении регулируемой мощности от нуля до 3. 5% от максимальной.
Диодно-резисторная цепочка разряжает конденсатор при переходе сетевого напряжения от отрицательной к положительной полуволне и, тем самым, устраняет эффект скачкообразного начального увеличения мощности в нагрузке.
Изредка можно встретить устройства, в которых регулировка мощности производится посредством отдельной схемы, которая формирует импульсы с регулируемой длительностью для управления симистором.
Такие диммеры обладают значительно лучшими характеристиками, чем представленные выше, однако обратной стороной медали является повышенная сложность устройств и необходимость наличия отдельного источника питания схемы. Исключения составляют устройства, выполненные на специализированных ИМС. Примером такой микросхемы является фазовый регулятор КР1182ПМ1. 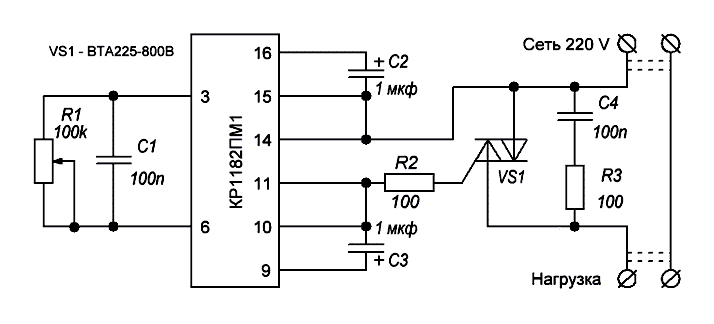
Рис.3
Применение КР1182ПМ1 в регуляторах мощности (Рис.3) позволяет добиваться как хорошей повторяемости, так и широкого диапазона перестройки и высокой температурной стабильности.
А если уж мы решили заморачиваться созданием отдельной схемы формирования управляющих импульсов, то имеет смысл отказаться от фазово-импульсного метода управления, и обратиться в сторону регуляторов мощности, работающих по принципу пропускания через нагрузку определённого целого числа периодов сетевого напряжения в единицу времени.
При таком способе регулирования появляется возможность включения симистора вблизи точки пересечения сетевым переменным напряжением нулевого потенциала, вследствие чего радикально снижается уровень помех, вносимых в электросеть.
Освещение таким диммером не запитаешь ввиду заметного мерцания, а вот для беспомехового регулирования мощности электронагревательных приборов — самое то.
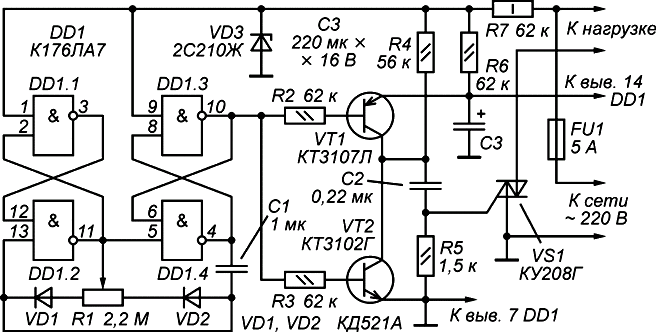
Данная схема (Рис.4) перекочевала со страницы https://www.radiokot.ru/circuit/power/converter/50/ и представляет собой модификацию регулятора мощности, описанного в журнале Радио, 2009, № 9, с. 40–41 «В.Молчанов Симисторный регулятор мощности». Вот, что пишет автор.
«Устройство предназначено для беспомехового регулирования мощности электронагревательных приборов, работающих от сети переменного тока 220 В.
Кроме снижения уровня коммутационных помех, в регуляторе реализован принцип пропускания в нагрузку целого числа периодов сетевого напряжения. При таком способе регулирования с высокой точностью обеспечивается отсутствие постоянной составляющей напряжения на нагрузке, вследствие чего дополнительно снижается уровень искажений, вносимых в электросеть. Это особенно важно в случае мощной нагрузки.
Максимальная мощность нагрузки, подключаемой к регулятору, составляет 1 кВт. Потребляемый регулятором ток от сети не превышает 4 мА (действующее значение), типовое потребление – 3,5 мА.
На микросхеме DD1 и элементах R1, C1, VD1, VD2 выполнен синхронизированный с сетью генератор прямоугольных импульсов. Период импульсов, вырабатываемых генератором, составляет около 1,3 с. Резистор R1 регулирует скважность импульсов. Элементы DD1.1, DD1.2 и DD1.3, DD1.4 включены как два RS‑триггера, на входы которых (выводы 1 и 9 микросхемы) через делитель R7R6 поступает часть сетевого напряжения. Транзисторы VT1 и VT2 выполняют функцию мощного инвертора логических сигналов для управления симистором. Питание устройства осуществляется через параметрический стабилизатор, в котором задействованы балластный резистор R7, стабилитрон VD3 и сглаживающий конденсатор C3. Когда напряжение на верхнем по схеме сетевом выводе относительно нижнего отрицательное, стабилитрон VD3 пропускает ток в прямом направлении, когда положительное – ограничивает напряжение на выводах 1 и 9 микросхемы DD1 на уровне 10 В. Ток, проходящий через эти выводы и внутренние защитные диоды микросхемы, заряжает конденсатор C3 до напряжения около 9,2 В, которое служит для питания низковольтной части устройства. Использование защитных диодов микросхемы не приводит к её защёлкиванию, поскольку амплитудное значение тока через резистор R7 ограничено и составляет около 5 мА.
Во время проверки регулятора мощности удобно в качестве нагрузки подключить лампу накаливания (желательно на 100 Вт или более). Устройство обычно не нуждается в налаживании, но если оказалось, что симистор VS1 открывается ненадёжно (лампа в нагрузке не включается или мерцает), можно попробовать уменьшить сопротивление резистора R4 или подобрать экземпляр симистора с меньшим током открывания. Резистор R4 позволяет выставить мгновенное напряжение сети, при котором происходит открывание симистора. Это напряжение может быть рассчитано по формуле Uпор ≈ Uпит∙R7/(2∙R4), где Uпит ≈ 9,2 В – напряжение на конденсаторе C3, сопротивления резисторов R6 и R7 должны быть равны. Уменьшение сопротивления резистора R4 обеспечивает более надёжное открывание симистора, но увеличивает уровень создаваемых помех, поэтому делать его сопротивление менее 30 кОм нежелательно».
И конечно, было бы совсем неправильно не упомянуть о таком важном представителе симисторного семейства, как — оптосимистор.
Оптосимистор включается посредством освещения полупроводникового слоя и представляет собой комбинацию оптоизлучателя и симистора в одном корпусе. Преимущество — простая однополярная схема управления и гальваническая изоляция цепей управления от фаз сетевого напряжения.
Оптосимисторы могут коммутировать нагрузку как сами (Рис.5),
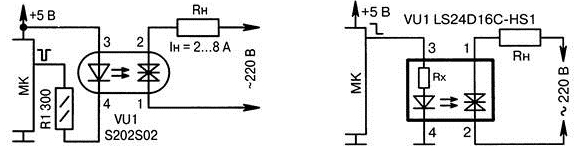
Рис.5
так и управлять более мощными симисторами (Рис.6).
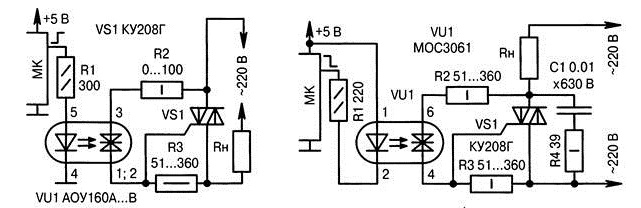
Рис.6
За счёт полной гальванической развязки управляющих цепей оптосимистора, основное его предназначение — это управление мощностью нагрузки при помощи логических устройств или микроконтроллеров с собственными цепями питания. 
Рис.7
В качестве примера на Рис.7 приведена схема регулятора мощности паяльника.
Вот, как работу этой схемы описывает уважаемый Falconist на странице сайта http://forum.cxem.net .
«Оптосимистор серии МОС204х/306х/308х содержит внутри себя схему пересечения питающим напряжением нуля, т.е. открывается только в точке нулевого значения синусоидального сетевого напряжения, независимо от момента поступления управляющего напряжения на его светодиод. Тем самым обеспечивается ключевой режим подключения нагрузки, с практически полным отсутствием ВЧ помех, проникающих в сеть 220 В. Поэтому его замена на оптосимисторы МОС302х/305х, не имеющих такой схемы, крайне нежелательна, т.к. порочит сам принцип беспомехового регулирования.
Конденсатор С1 является балластным реактивным сопротивлением. Ток, который он пропускает совместно с подключенным параллельно ему резистором R1,приближенно составляет 16 мА. Данный ток используется для питания таймера DA1 и инфракрасного светодиода оптрона DA2».
Работа таймера, формирующего управляющий сигнал для оптотиристора, аналогична работе DD1 на Рис.4 и сводится к формированию импульсов с изменяемой скважностью.