Возбуждение двигателя постоянного тока. Схемы возбуждения.
Возбуждение двигателя постоянного тока является отличительной особенностью таких двигателей. От типа возбуждения зависят механические характеристики электрических машин постоянного тока. Возбуждение может быть параллельным последовательным смешанным и независимым. Тип возбуждения означает, в какой последовательности включены обмотки якоря и ротора.
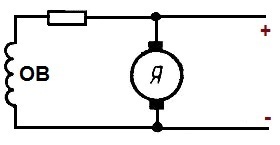
При параллельном возбуждении обмотки якоря и ротора включаются параллельно друг другу к одному источнику тока. Так как у обмотки возбуждения больше витков чем у якорной то и ток в ней течет незначительный. В цепи, как обмотки ротора, так и обмотки якоря могут включаться регулировочные сопротивления.
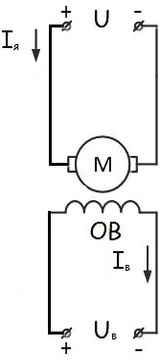
Обмотка возбуждения может подключаться и к отдельному источнику тока. В этом случае возбуждение будет называться независимым. У такого двигателя характеристики будут схожи с двигателем, в котором применяется постоянный магнит. Скорость вращения двигателя с независимым возбуждением, как и у двигателя с параллельным возбуждением зависит от тока якоря и основного магнитного потока. Основной магнитный поток создается обмоткой ротора.
Скорость вращения можно регулировать с помощью реостата включенного в цепь якоря изменяя тем самым ток в нем. Также можно регулировать ток возбуждения, но здесь нужно быть осторожным. Так как при его чрезмерном уменьшении или полном отсутствии в результате обрыва питающего провода ток в якоре может возрасти до опасных значений.
Также при малой нагрузке на валу или в режиме холостого хода скорость вращения может настолько увеличится, что может привести к механическому разрушению двигателя.
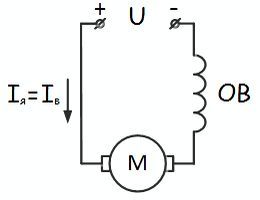
Если обмотка возбуждения включена последовательно с якорной, то такое возбуждение называется последовательным. При этом через якорь и обмотку возбуждения протекает один и тот же ток. Таким образом, магнитный поток изменяется с изменением нагрузки двигателя. А следовательно скорость двигателя будет зависеть от нагрузки.
Двигатели с таким возбуждением нельзя запускать на холостом ходу либо с небольшой нагрузкой на вал. Их применяют в том случае если, требуется большой пусковой момент или способность выдерживать кратковременные перегрузки.
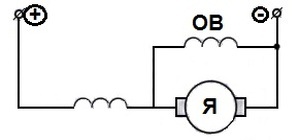
При смешанном возбуждении используются двигатели, у которых на каждом полюсе есть по две обмотки. Их можно включить так чтобы магнитные потоки как складывались, так и вычитались.
В зависимости от того как соотносятся магнитные потоки двигатель с таким возбуждением может работать как двигатель с последовательным так и двигатель с параллельным возбуждением. Все зависит от ситуации, если нужен большой стартовый момент, такая машина работает в режиме согласного включения обмоток. Если же необходима постоянная скорость вращения, при динамически изменяющейся нагрузке применяют встречное включение обмоток.
В машинах постоянного тока можно изменять направление движения ротора. Для этого необходимо изменить направление тока в одной из обмоток. Якорной либо возбуждения. Изменением полярности направление вращения двигателя можно добиться только в двигателе с независимым возбуждением, или в котором используется постоянный магнит. В других схемах включения нужно переключать одну из обмоток.
Стартовый ток в машине постоянного тока достаточно велик, поэтому ее следует запускать с добавочным реостатом, чтобы избежать повреждения обмоток.
Схемы соединения обмоток машин постоянного тока
V. СХЕМЫ ОБМОТОК МАШИН ПОСТОЯННОГО ТОКА
38. ЯКОРНЫЕ ОБМОТКИ (ОСНОВНЫЕ СВЕДЕНИЯ)*
Обмотка якоря состоит из секций. Секция представляет собой наименьшую часть обмотки, заключенную между двумя присоединениями к коллектору. Секция может состоять из одного, двух или нескольких витков. Активные стороны одной секции располагаются под разными полюсами на расстоянии, обычно равном или несколько меньшем полюсного деления.
Полюсное деление — часть окружности якоря, приходящаяся на один полюс. Величина полюсного деления (см)
В зависимости от формы секций различают волновые, петлевые и комбинированные (лягушечьи) обмотки. Волновые и петлевые обмотки в зависимости от шага по коллектору могут быть простыми и сложными. Сложные обмотки называют также многоходовыми.
Волновые в петлевые якорные обмотки обычно выполняют двухслойными **, присоединяя к каждой коллекторной пластине выводы двух секций. Следовательно, число секций обмотки S равно числу коллекторных пластин К. В пазу якоря может быть расположено две, четыре, шесть и более сторон секций. Каждая пара расположенных друг над другом сторон образует элементарный паз, число которых в реальном пазу обозначается ип. Число элементарных пазов якоря равно произведению числа пазов z на ип и равно числу секций, т. е. zэ=zип=S=K***.
Лягушечья обмотка укладывается в пазах якоря в четыре слоя, причем волновая обмотка охватывает петлевую (одна сторона секции волновой обмотки располагается у клина, вторая — на дне паза).
В зависимости от взаимного расположения выводов секций различают также неперекрещенные и перекрещенные обмотки (рис. 89, 90).
Катушкой якорной обмотки называют группу секций, образующих элемент обмотки до укладки в пазы. Катушка состоит из одной или нескольких секций, обычно имеющих общую корпусную изоляцию. Число секций в каждой стороне катушки равно числу элементарных пазов в реальном пазу якоря. Часть катушки, расположенную вне пазов, называют лобовой частью. Различают лобовую часть со стороны коллектора и с противоположной стороны.
При большом сечении шин катушки для облегчения укладки выполняют из двух частей (полукатушек). Секция в этом случае имеет обычно один виток и состоит из двух полусекций (стержней). Такая обмотка называется стержневой. Переход из верхнего слоя в нижний осуществляется при помощи хомутиков, надеваемых на концы стержней и припаиваемых к ним.
* Схемы разметки якоря см.: Виноградов Н. В. Обмотчик электрических машин. — М: Высшая школа, 1977.
** В очень редких случаях для низковольтных машин на большие токи применяют однослойные обмотки.
*** Исключение из этого правила составляет обмотка с «мертвой> секцией.
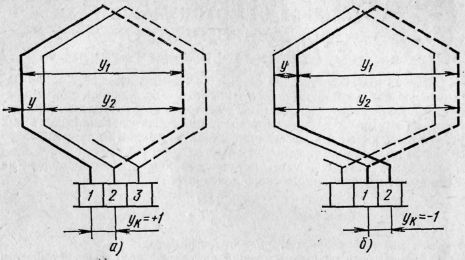
Рис. 89. Простая петлевая обмотка: а — неперекрещенная (правая), б — перекрещенная (левая)
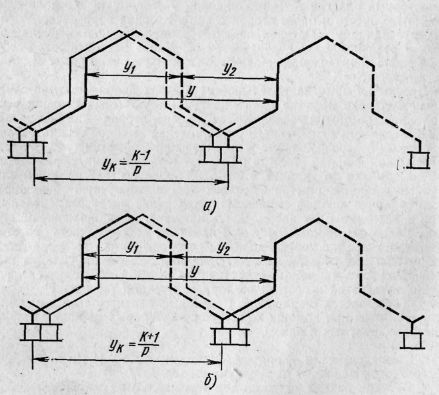
Рис. 90. Простая волновая обмотка: а — неперекрещенная (левая), б — перекрещенная (правая)
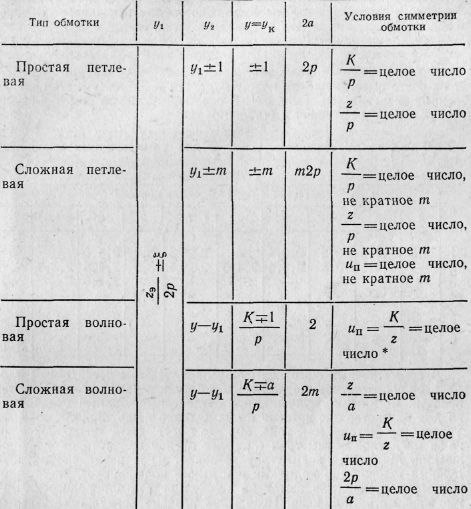
Таблица 59. Шаги, числа параллельных ветвей и условия симметрии петлевых и волновых обмоток
Примечание. y1 — первый шаг — расстояние между сторонами одной и той же секции (ширина секции). Обычно выполняются обмотки с первым шагом y1≤τ; y2 — второй шаг — расстояние между второй стороной данной секции и первой стороной следующей за ней по схеме секции; у — результирующий шаг — расстояние между верхними или нижними сторонами двух следующих друг за другом по схеме секций; ук — шаг по коллектору — расстояние между началом и концом секции, измеренное числом коллекторных делений; 2а — число параллельных ветвей; m — коэффициент кратности, равный числу простых обмоток, составляющих сложную; | — наименьшее дробное число, которое надо вычесть или прибавить, чтобы частное от деления числа элементарных пазов на число полюсов равнялось целому числу.
Шаги обмотки y1, y2 и у обычно выражают числом секций или элементарных пазов (табл. 59). Шаг по коллектору измеряют числом коллекторных пластин, а шаг по пазам yz — числом пазов. Полюсное деление т также может быть выражено числом элементарных пазов:
Якорные обмотки должны удовлетворять требованиям симметрии, поэтому соотношения между ип, z, а и К должны иметь определенные значения (см. табл. 59). В сложной волновой обмотке выбор ип и z еще более ограничен (табл. 60).
Какие существуют схемы подключения электродвигателей постоянного тока
В домашнем хозяйстве редко встретишь мотор, работающий на постоянном токе. Зато они всегда устанавливаются в детских игрушках, которые летают, ездят, шагают и т.д. Всегда они стоят в автомобилях: в различных приводах и вентиляторах. В электротранспорте чаще всего используют тоже их.
Другими словами, применяются двигатели постоянного тока там, где требуется достаточно широкий диапазон регулирования скорости и точность ее поддержания.
Электродвигатели постоянного тока
Электрическая мощность в моторе преобразуется в механическую, заставляющую его вращаться, а часть этой мощности расходуется на нагревание проводника. Конструкция двигателя электрического постоянного тока включает якорь и индуктор, которые разделяют воздушные зазоры. Индуктор, состоящий из добавочных и главных полюсов, и станины, предназначен для создания магнитного поля. Якорь, собранный из отдельных листов, обмотка рабочая и коллектор, благодаря которому постоянный ток подводится к рабочей обмотке, образуют магнитную систему. Коллектор – это насаженный на вал двигателя цилиндр, собранный из изолированных друг от друга медных пластин. К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
Щетки, в процессе работы, скользят по поверхности вращающегося коллектора, переходя от одной его пластины к другой. При этом, в параллельных секциях обмотки якоря происходит изменение тока (когда щетка накоротко замыкает виток). Процесс этот называют коммутацией.
Под влиянием своего магнитного поля, в замкнутой секции обмотки возникает ЭДС самоиндукции, вызывающая появление дополнительного тока, который на поверхности щеток распределяет неравномерно ток, что приводит к искрению.
Частота вращения – одна из важнейших его характеристик. Ее регулировать можно тремя способами: изменяя поток возбуждения, изменяя величину подводимого напряжения к двигателю, изменяя сопротивление в якорной цепи.
Два первых способа встречаются намного чаще третьего, ввиду его неэкономичности. Ток возбуждения регулируется при помощи любого устройства, у которого возможно изменять активное сопротивление (например, реостата). Регулирование при помощи изменения напряжения требует наличие источника постоянного тока: преобразователя или генератора. Такое регулирование применяют во всех промышленных электроприводах.
Торможение электрического двигателя постоянного тока
Для торможения электроприводов с ДПТ также есть три варианта: торможение противовключением, динамическое и рекуперативное. Первое происходит за счет изменения полярности тока в обмотке якоря и напряжения. Второе происходит благодаря замыканию накоротко (через резистор) обмотки якоря. Электрический двигатель при этом работает как генератор, преобразуя в электрическую, запасенную им механическую энергию, которая выделяется в виде тепла. Это торможение сопровождается мгновенной остановкой двигателя.
Последнее происходит, если электрический мотор, включенный в сеть, вращается со скоростью, которая выше скорости холостого хода. ЭДС обмотки двигателя в этом случае, превышает значение напряжении я в сети, что приводит к изменению на противоположное направление тока в обмотке мотора, т.е. двигатель отдает в сеть энергию, переходя в режим генератора. Одновременно возникает тормозной момент на валу.
Преимущества двигателей постоянного тока
Сравнивая их с асинхронными моторами, нужно отметить отличные пусковые качества, высокую (до 3000 об/мин) частоту вращения, а также хорошую регулировку. Из недостатков отметить можно? Сложность конструкции, низкую надежность, высокую стоимость и затраты на ремонт и обслуживание.
Принцип действия ДПТ
ДПТ, как и любой современный мотор, работает на основе «Правила левой руки», с которым все знакомы еще со школы и закона Фарадея. При подключении тока к нижней обмотке якоря в одном направлении, а к обмотке верхней – в другом, якорь начинает вращаться, а уложенные в его пазах проводники – выталкиваться магнитным полем статора или обмоток корпуса двигателя постоянного тока. Вправо выталкивается нижняя часть, а влево – верхняя. В результате якорь вращается до тех пор, пока его части не поменяются местами. Чтобы добиться непрерывного вращения, необходимо полярность обмотки якоря регулярно менять местами. Как раз этим и занимается коллектор, коммутирующий при вращении обмотки якоря. На коллектор от источника подается напряжение через пару прижимных щеток из графита.
Принципиальные схемы ДПТ
Двигатель переменного тока подключается просто, в отличие от ДПТ. Обычно у таких двигателей высокой и средней мощности имеются отдельные выводы в клеммной коробке (от обмотки и якоря). На якорь обычно подается полное напряжение, а на обмотку — ток, регулировать который можно реостатом или напряжением переменным. От величины тока, имеющегося на обмотке возбуждения, прямопропорционально зависят обороты двигателя переменного тока.
В зависимости от того, какая используется схема подключения электродвигателя постоянного тока, двигатель электрический может быть постоянного тока, разделяют на самовозбуждающиеся и с независимым возбуждением (от отдельного источника).
Схема для подключения двигателя с возбуждением параллельным
Она аналогична предыдущей, но не имеет отдельного источника питания.
Когда требуется большой пусковой ток, применяют двигатели с возбуждением последовательным: в городском электротранспорте (троллейбусах, трамваях, электровозах).
Токи обоих обмоток в этом случае одинаковы. Недостаток – требуется постоянная нагрузка на вал, поскольку при ее уменьшении на 25%, резко увеличивается частота вращения и происходит отказ двигателя.
Есть еще моторы, которые крайне редко используются — со смешанным возбуждением. Их схема представлена ниже.
Электродвигатель постоянного тока с параллельным возбуждением
Под понятием «возбуждение» понимают создание в электрических машинах магнитного поля, которое необходимо, чтобы заработал двигатель. Схем возбуждения несколько:
С независимым возбуждением (питание обмотки происходит от постороннего источника).
Электродвигатель постоянного тока с параллельным возбуждением (источник питания обмотки возбуждения и якоря включены параллельно) – шунтовые.
С последовательным возбуждением (обе обмотки включены последовательно) – сериесные.
Со смешанным возбуждением – компаундные.
Бесщеточные моторы
Но, двигатель со щетками, которые быстро изнашиваются и приводят к искрению, не может использоваться там, где необходима высокая надежность, поэтому среди электротранспорта (электровелосипедов, скутеров, мотоциклов и электромобилей) наибольшее применение нашли бесщеточные электродвигатели. Они отличаются высоким КПД, невысокой стоимостью, хорошей удельной емкостью, длительным сроком службы, малыми размерами, бесшумной работой.
Работа этого двигателя основывается на взаимодействии магнитных полей электромагнита и постоянного. Когда за окном 21 век, а вокруг полно мощных и недорогих проводников, логично заменить механический инвертор цифровым, добавить датчик положения ротора, решающий в какой момент на конкретную катушку необходимо подать напряжение, и получить бесщеточный электродвигатель постоянного тока. В качестве датчика чаще используется датчик Холла.
Поскольку в этом двигателе удалены щетки, он не нуждается в регулярном обслуживании. Управляется двигатель постоянного тока при помощи блока управления, позволяющего изменять частоту вращения вала мотора, стабилизировать на определенном уровне обороты (независимо от имеющейся на валу нагрузки).