Пуск двигателя с фазным ротором
Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению s п= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
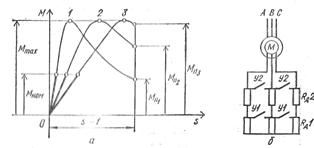
Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток I п = (4,5 — 7) I ном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.

Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1 , а, кривая 3), если критическое скольжение двигателя с фазным ротором
s кр = ( R2′ + R д ‘) / ( Х1 + Х2 ‘) = 1 ,
где R д ‘ — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0,1 — 0,4) M ном, нормальным, если Мп — (0,5 — 0,75) Мном, и тяжелым при Мп ≥ Мном.
Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0,85 Ммах, момент переключения М2 > > Мс (рис. 2), а также ускорение.

Переключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1 , t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой.
Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 — 2,5) I ном и ток переключения I 2, который должен обеспечить момент переключения М 2 > М c .
Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 — 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой.
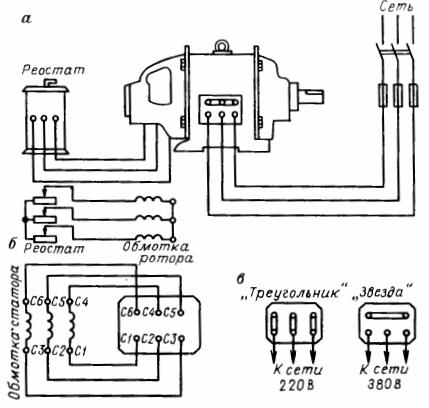
Рис. 3. Схема соединения обмоток двигателя с фазным ротором: а — к питающей сети, б — ротора, в — на доске зажимов.
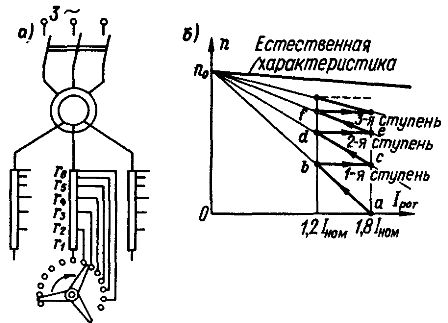
Рис. 4. Пуск двигателя с фазным ротором: а — схема включения, б — механические характеристики
Схема пуска асинхронного двигателя с фазным ротором, функции времени.

Для уменьшения пускового тока и увеличения пускового момента — в цепь ротора включают токоограничивающий резистор R, ступени которого включены в цепь не только вовремя пуска, и торможении, а также при реверсе электродвигателя с фазным ротором.
Двигатель будет разгоняться по искусственной характеристики с большим пусковым моментом и меньшим пусковым током. По мере разгона ступени резистора будут шунтироваться до полного вывода из цепи (обмотка ротора закорочена), а следовательно электродвигатель перейдёт на свою естественную характеристику. Пуск окончен.
Схема пуска двигателя с фазным ротором, функции тока.
Схема подключения двигателя с фазным ротором, функции времени.
Схема подключения двигателя фазным ротором представлена на рисунке 1. В данной схеме используется управление функции времени и двухступенчатый пусковой резистор.
Включением автоматического выключателя QF напряжение подается на управляющую и силовую цепь. Это приводит к срабатыванию реле времени КТ1, КТ2 которые размыкают свои контакты. Нажатием кнопки SB1 “ Пуск” подключается магнитный пускатель КМ3, который:
размыкает контакты:
- КМ3.3 — снимает напряжения с реле времени КТ1, которое, после окончания выдержки времени, размыкает свои контакты КТ1.
замыкает контакты:
- КМ3.1 в цепи статора — двигатель запускается с включенными в цепь ротора двумя ступенями резистора, так как контакторы КМ1 и КМ2 питания не получают. До истечении выдержки времени КТ1.
- КМ3.2 — шунтирует кнопку “ Пуск” (позволяет не удерживать кнопку SB1 в нажатом положении)
- КМ3.4 – в цепи катушек магнитных пускателей КМ1 и КМ2, но до окончания выдержки времени КТ1 пускатели КМ1 и КМ2 не получают питания.
 Рисунок 1.1 GIF — анимация схемы работы пуска асинхронного двигателя с фазным ротором
Рисунок 1.1 GIF — анимация схемы работы пуска асинхронного двигателя с фазным ротором
 Рисунок 1.1 GIF — анимация схемы работы пуска асинхронного двигателя с фазным ротором
Рисунок 1.1 GIF — анимация схемы работы пуска асинхронного двигателя с фазным ротором Для удобства просмотра — в конце статьи выложены все кадры анимации.
По истечении времени выдержки, КТ1 срабатывает и замыкает свои контакты – по катушке КМ1 протекает ток, пускатель срабатывает и шунтирует первую ступень пускового резистора R. Одновременно своими нормально замкнутыми контактами КМ1.1 обесточивает реле времени КТ2. До окончания выдержки времени КТ2 двигатель разгоняется только со второй ступенью сопротивления. После окончания выдержки резистор полностью шунтируется и двигатель переходит на свою естественную механическую характеристику. Пуск окончен.
Описание фазного ротора
Время на чтение:
Асинхронный двигатель с фазным ротором широко применяется как в быту, так и на производстве. Ниже рассмотрено, что из себя представляет АД, каковы его конструкция и принцип функционирования, какую схему использовать для подключения и пуска.
Что такое АД с фазным ротором
Асинхронную машину изобрели в 1888 г., когда практически одновременно Н. Тесла запатентовал схему электромотора, а Г. Феррарис написал теоретическую статью о принципах функционирования АД. Год спустя похожая установка была изобретена и русским ученым О. Доливо-Добровольским, в которой использовалась трехфазная обмотка.
Эти изобретения стали революционными в мировой промышленности, и по сей день многофазные АД применяются в большинстве сфер жизни: от бытовых задач до массивных производств. Революция произошла благодаря конструкции мотора, обеспечивающей большую эффективность работы. Отныне все действия на производствах осуществлялись быстрее и с меньшими затратами.
 АД с фазным ротором
АД с фазным ротором
К сведению! Именно прототип Доливо-Добровольского дал начало всем существующим сегодня АД.
Технические параметры
Асинхронная машина обладает следующими техническими характеристиками:
- габариты и мощность. Они должны равняться приведенным в техрегламенте;
- степень защиты. При эксплуатации в разных условиях требуется различный уровень защиты. Машина может работать на улице или в помещениях, в зависимости от этого требуется определенный уровень защиты;
- хорошая степень изоляции. Нужно, чтобы мотор был устойчив нагреванию;
- вид. Существуют различные типы асинхронных машин, предназначенные для эксплуатации в экстремальных погодных условиях, при очень низких или высоких температурах (в холодной местности на севере или на жаркой территории на юге). Необходимо, чтобы устройство двигателя соответствовало окружающим условиям;
- абсолютное соответствие режимам работы (на практике и в теории);
- система охлаждения, работающая согласно конкретному режиму;
- громкость работы при холостом включении не должна превышать второй класс.
Как работает
Принцип функционирования электродвигателя с фазным ротором основан на магнитном поле, которое вращается с угловой скоростью, зависящей от частоты сети и пар полюсов обмотки статора. Поле образовывается при соединении с сетью трехфазной намотки. Как правило, асинхронный мотор имеет намотку во много фаз (обычно три фазы), но существуют и однофазные.
При пересечении обмоток магнитное поле в соответствии с правилом электромагнитной индукции индуктирует электродвижущую силу в этих намотках. Если намотка ротора замкнута, ее электродвижущая сила вводит в электроцепи ротора энергию. Образуется электромагнитный момент.
Мотор назвали асинхронным из-за того, что угловая скорость ротора не равна угловой скорости вращения электромагнитного поля, то есть они двигаются несинхронно.
Процессы, проходящие в асинхронном электродвигателе, измеряют параметром под названием скольжение, который рассчитывается как разность угловых скоростей ротора и магнитного поля.
Обратите внимание! Скольжение бывает положительным и отрицательным в зависимости от режима функционирования электромотора.
При идеальном холостом ходе оно равняется нулю, ротор и поле крутятся с равной быстротой. Никакой электродвижущей силы не образуется, ток и электромагнитный момент нулевые. При включении двигателя скольжение равняется 1 и при идеальном ходе постепенно достигает 0. Если вращать ротор в другую сторону относительно магнитного поля (разница угловых скоростей будет больше 1), появится тормозной момент, так как электродвигатель переходит в режим противовключения.
 Расчет скольжения
Расчет скольжения
В соответствии со значением скольжения в ходе работы электродвигателя различают 3 режима его функционирования:
- противовключение (скольжение стремится от 1 до бесконечности);
- генераторный (скольжение от 0 до бесконечности);
- двигательный (скольжение стремится от единицы до нуля).
Конструкция
Устройство трехфазного асинхронного двигателя с фазным ротором включает 2 главные детали — статор и ротор. Ротор представляет собой движущуюся часть, а статор — фиксированную. Между ними есть воздух.
 Устройство асинхронного электромотора
Устройство асинхронного электромотора
Конструкция статора включает шихтованный магнитный провод, который запрессован в литую станину. Внутри провода есть пазы, предназначенные для вложения проводников намотки. Они представляют собой стороны мягких катушек с большим количеством витков.
К сведению! Эти катушки создают 3 фазы обмотки статора, поэтому АД называют 3-фазным. Оси катушек находятся под углом 120° относительно друг друга.
Контачат фазы обмотки разными схемами: «звездой» и «треугольником». Выбор схемы зависит от напряжения в электросети. При значении 220 В в спецификациях асинхронного электромотора используется схема «треугольник», при 220/380 В — «звезда».
Ротор является цилиндром, сложенным из круглых листов электротехнической стали. Стопка этих листов насаживается на вал. Есть 2 типа роторов, различающиеся по разновидности обмотки: фазные и короткозамкнутые. Именно фазные используются в мощных асинхронных электрических движках.
Где применяется
Большая часть всех электродвигателей, выпускающихся в производственных масштабах, являются асинхронными.
 Крановый асинхронный электродвигатель
Крановый асинхронный электродвигатель
Список сфер, где применяются асинхронные моторы:
- медицинское оборудование;
- техника для записи звука;
- устройства автоматики;
- бытовые приборы.
Обратите внимание! АД применяется там, где нужны высокие мощности, но вместе с тем нет необходимости в плавном регулировании скорости вращения в больших диапазонах.
Такие электромоторы чаще всего используют в тяжелом оборудовании, к примеру, в подъемных кранах, станках, лифтах и прочих подъемниках. Проще говоря, асинхронную машину нужно подключать в тех условиях, где работа производится под нагрузкой.
Схема пуска и подключения асинхронного двигателя
Есть 2 основных схемы подключения — «звезда» и «треугольник». Часто применяется 1 тип, намотки при этом подключаются на фазное напряжение. При схеме «треугольник» их подсоединяют к линейному.
 Асинхронный двигатель с фазным ротором, схемы подключения «звезда» и «треугольник»
Асинхронный двигатель с фазным ротором, схемы подключения «звезда» и «треугольник»
Каждую схему используют для разных целей. Если требуется, чтобы в двигателе достигалась большая мощность на валу, но некритично, если будут просадка напряжения и высокие пусковые токи, нужно подключить обмотки «треугольником». В остальных случаях выбор схемы зависит от напряжения.
Таким образом, открытие Доливо-Добровольского сегодня сильно востребовано. АД используют во многих сферах, начиная от медицины и заканчивая бытовыми приборами. Перед применением двигателя главное — правильно выбрать схему подключения.