Схема замещения асинхронного двигателя
При практических расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора.
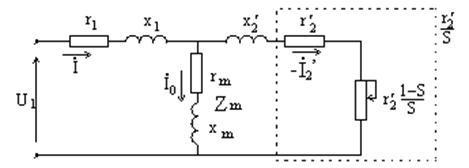
По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию (а не в электрическую, как это происходит в трансформаторе), поэтому на схеме замещения добавляют переменное активное сопротивление r2 ‘ (1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Z н .
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания.
Как и у трансформатора, у асинхронного двигателя есть Т-образная схема замещения.

Более удобной при практических расчетах является Г-образная схема замещения.

В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения подводимого к двигателю, к ЭДС статора.

Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Параметры схемы замещения рассматриваются подробнее в статье векторная диаграмма асинхронного двигателя
Схемы замещения асинхронной машины




![]()
![]()
Для исследования работы асинхронной машины часто используются схемы замещения, которые должны отвечать основным уравнениям ЭДС и токов реальной машины.
Реально обмотки статора и ротора связаны электромагнитно. Схемы, где электромагнитная связь обмоток заменяется электрической, называются схемами замещения асинхронной машины. В теории асинхронных машин используются две схемы замещения: а) Т-образная; б) Г-образная.
Т-образная схема замещения.
В этой схеме замещения сопротивления  в разных цепях. Из опыта короткого замыкания обычно определяют их сумму т.е.
в разных цепях. Из опыта короткого замыкания обычно определяют их сумму т.е.
Поэтому в теории асинхронных машин чаще пользуются Г-образной схемой замещения. При переходе к Г-образной схеме замещения:
1) ток I1 должен оставаться неизменным, т.е. I1 = const.
2) При скольжении S = 0 ток  , т.е. ток
, т.е. ток  должен проходить по тем же сопротивлениям Z1 и Zm.
должен проходить по тем же сопротивлениям Z1 и Zm.
3) Кроме того параметры первичной обмотки и вторичной обмотки соответственно должны измениться на коэффициент С1 и  .
.
Г-образная схема замещения

В Г-образной схеме рабочая ветвь и цепь намагничивания независимы, а сопротивления активные и индуктивные можно просуммировать.
В Г-образной схеме замещения
 ,
,
где  — комплексное число
— комплексное число
Ток I1, не должен изменяться, тогда исходя из Т-образной схемы

а, в Г-образной схеме ток
после преобразования получим
 ,
,
поэтому параметры статорной обмотки должны умножить на коэффициент С1, а параметры роторной обмотки на (см. Г-образную схему). Покажем связь между током в роторе  (Т-образной схемы замещения) с током
(Т-образной схемы замещения) с током  (Г-образной схемы замещения).
(Г-образной схемы замещения).
Из Т-образной схемы ток
 ,
,
если подставить выражение тока  и преобразуем это выражение, тогда получим
и преобразуем это выражение, тогда получим
 ,
,
тогда отношение токов

равно комплексному коэффициенту С1.
т.е. С1 представляет собою отношение напряжения приложенного к двигателю  к напряжению на намагничивающем контуре при токе идеального холостого хода (S = 0).
к напряжению на намагничивающем контуре при токе идеального холостого хода (S = 0).
Cхема замещения асинхронного электродвигателя
Трехфазные асинхронные электродвигатели, или как их еще называют индукционные электродвигатели, являются наиболее распространенными в промышленности. Данный тип электродвигателя, аналогично машинам постоянного тока тоже обладают свойствами обратимости, и может работать как в двигательном, генераторном, так и в тормозных режимах – противовключение, динамическое торможение. Режим работы асинхронного электродвигателя характеризуют знаком и величиной скольжения.
Пожалуй, основным методом анализа установившихся режимов индукционного электродвигателя является использование эквивалентных схем замещения. В таком случае обычно рассматривают явление, которое относится к одной фазе многофазного двигателя при соединении его обмоток звездой.
Упрощенная картина магнитных потоков работающего асинхронного электродвигателя позволяет представить его в виде эквивалентной схемы:

Электромагнитная связь первичной и вторичной цепи осуществляется потоком взаимоиндукции Ф, индуктирующим в роторной обмотке ЭДС Е2S. Сопротивление индуктивное первичной цепи Х1 обусловлено наличием потока рассеивания, связанного только с этой цепью. Аналогично сопротивления Х2 обусловлено потоком рассеивания Ф25.
Частота тока ротора будет определяться скоростью его вращения относительно скорости вращения магнитного поля статора, то есть зависеть от скольжения и будет равна f2 = f1S.
Ток вторичной цепи при вращающемся роторе:

Также выражения для I2 может иметь:

Выше показанные выражения имеют не только различную форму записи, но и имеют совершенно разный физический смысл. А смысл его в том, что вместо вращающегося ротора можно рассматривать неподвижный, в котором будет индуцироваться ЭДС Е2. При этом индуктивное сопротивление будет равно Х2, а активное возрастет на величину  так как
так как  . При этом I1 останется прежним по фазе и величине, что не повлияет на потребляемую из сети мощность. Поскольку I1 и I2 не изменятся, то естественно и потери в первичных и вторичных цепях также не изменятся, соответственно мощность тоже не будет изменяться, а мощность развиваемая двигателем при вращении, будет равна мощности, потребляемой в добавочном сопротивлении . Таким образом, эквивалентная схема замещения асинхронной машины может быть заменена схемой замещения с добавочным сопротивлением rд во вторичной цепи:
. При этом I1 останется прежним по фазе и величине, что не повлияет на потребляемую из сети мощность. Поскольку I1 и I2 не изменятся, то естественно и потери в первичных и вторичных цепях также не изменятся, соответственно мощность тоже не будет изменяться, а мощность развиваемая двигателем при вращении, будет равна мощности, потребляемой в добавочном сопротивлении . Таким образом, эквивалентная схема замещения асинхронной машины может быть заменена схемой замещения с добавочным сопротивлением rд во вторичной цепи:

Т – образная схема замещения
После приведения первичной и вторичной ЭДС они будут равны Е1 = Е2 / и это дает возможность соединить эквивалентные точки и получить такую схему:

Недостатком Т – образной схемы замещения помимо сложностей расчета, является зависимость всех токов I1, I2 / , Iμ от скольжения s.
Из Т – образной схемы замещения видно, что в режиме холостого хода, при I2 / = 0 и s = 0, ток в контуре будет обуславливаться сопротивлениями намагничивающего контура и первичной цепи и совсем не будет зависеть от скольжения. Данное обстоятельство позволит вынести на зажимы электродвигателя намагничивающий контур и перейти к Г – образной схеме замещения.
Г – образная схема замещения
Данная схема замещения позволяет изучать процессы в асинхронном электродвигателе, которые имеют место при изменении скольжения электрической машины.

Учет контура намагничивания необходим при определении I1, который потребляется из сети. Но Г — образная схема замещения будет справедлива лишь при наличии определенных допущений:
- Все цепи имеют неизменные (постоянные) параметры. Это значит, что приведенное вторичное сопротивление r2 / не будет зависеть от частоты цепи вторичной (ротора), а насыщение не будет влиять на реактивное сопротивление статорных и роторных обмоток Х1 и Х2 / ;
- Полная проводимость намагничивающего контура принимается неизменной, а ток намагничивания, независимо от нагрузки, будет всегда пропорционален напряжению, приложенному к обмоткам;
- Потери добавочные не учитываются;
- Паразитные моменты, создаваемые высшими гармониками МДС, также не учитывают.
Следует также помнить и то, что в Г – образной схеме замещения в величины сопротивлений необходимо внести соответствующие поправки:


В выше перечисленных уравнениях величины имеющие индекс «дейст» соответствуют реальным значениям параметров асинхронной машины, а без индексов – те, которые используют в эквивалентной схеме.
Поскольку отношение r1/xμ довольно таки мало, то практически довольно часто принимают:

Обычно δ лежит в пределах 1,05 – 1,1.
Первичный ток I1 будет равен при любом скольжении:

Приведенный роторный ток:

Показанное выше выражение показывает, что ток ротора является функцией скольжения. При s = 0 I2 / = 0. При увеличении скольжения I2 / также будет расти, а при s = 1 достигнет своего максимума, или тока короткого замыкания, или пускового:

Если в роторной цепи отсутствует добавочное сопротивление (АД с КЗ ротором), пусковой ток может достигнуть довольно приличных значений, а именно 5 – 8 раз больше чем его номинальное значение.
Данная зависимость показана ниже:

Отношения пускового значения к номинальному является очень важным параметром для асинхронных машин с короткозамкнутым ротором, так как наличие пусковых токов приводит к просадкам напряжения, что особо ощутимо при использовании электродвигателей средней и большой мощности. Поэтому данная характеристика приводится в каталогах по выбору электрических машин.