Схема замещения асинхронного двигателя
При практических расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора.
По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию (а не в электрическую, как это происходит в трансформаторе), поэтому на схеме замещения добавляют переменное активное сопротивление r2 ‘ (1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Z н .
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания.
Как и у трансформатора, у асинхронного двигателя есть Т-образная схема замещения.

Более удобной при практических расчетах является Г-образная схема замещения.

В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения подводимого к двигателю, к ЭДС статора.

Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Параметры схемы замещения рассматриваются подробнее в статье векторная диаграмма асинхронного двигателя
Схемы замещения асинхронного двигателя переменного тока

Из принципа действия асинхронного двигателя известно, что для того чтобы ротор асинхронного двигателя пришел во вращение, обмотка ротора должна быть замкнута накоротко .
Как видно из схемы, асинхронный двигатель при разомкнутом роторе представляет собой трехфазный трансформатор в режиме холостого хода, следовательно, для расчета параметров асинхронного двигателя можно использовать схему замещения трансформатора.
Схема замещения трансформатора.
Как видно из формулы скольжения, оно будет изменяться в двигательном режиме от 1 до 0. Отсюда следует, что при работе асинхронного двигателя ток ротора будет изменяться в зависимости от режима работы, то есть в зависимости от скольжения. Двигатель будет работать только в том случае, когда обмотка ротора замкнута. Чтобы учесть в схеме замещения влияние нагрузки на ток I2’, включаем в цепь ротора переменное сопротивление, равное по величине [(1-s)/s]·τ2’.
Схема замещения асинхронного двигателя:
Схема замещения асинхронного двигателя.
Т-образная схема замещения двигателя:
Т-образная схема замещения асинхронного двигателя.
Т-образная схема замещения асинхронного двигателя не совсем точно отражает физические процессы, происходящие в асинхронном двигателе, и поэтому не может быть использована для расчета его параметров.
Чтобы учесть влияние тока нагрузки на напряжение между точками 1 и 2 выносим намагничивающий контур на зажимы статора двигателя. Получаем схему замещения, у которой намагничивающий контур не зависит от нагрузки.
Г-образная схема замещения:
Г-образная схема замещения асинхронного двигателя.
I2’ – ток ротора, приведенный к статору.
Исследование методов расчета параметров схемы замещения асинхронного двигателя по данным каталога производителя

Рубрика: Технические науки
Дата публикации: 13.05.2020 2020-05-13
Статья просмотрена: 143 раза
Библиографическое описание:
Мясовский, В. А. Исследование методов расчета параметров схемы замещения асинхронного двигателя по данным каталога производителя / В. А. Мясовский. — Текст : непосредственный // Молодой ученый. — 2020. — № 20 (310). — С. 127-133. — URL: https://moluch.ru/archive/310/69984/ (дата обращения: 25.03.2021).
Работа представляет собой исследование методов расчета параметров схемы замещения асинхронного двигателя по данным каталога производителя и анализ результатов моделирования по этим расчетам в MATLAB Simulink.
Ключевые слова: расчет, параметры схемы замещения, асинхронный двигатель, каталожные данные, MATLAB Simulink.
Асинхронные двигатели получили широкое применение во всех отраслях промышленности, поскольку они обладают относительно невысокой стоимостью и намного проще в обслуживании, чем двигатели постоянного тока. Вследствие этого для изучения поведения асинхронных двигателей существуют различные способы моделирования процессов, происходящих при их работе. Конечно, есть более наглядный и реальный способ изучения — использование лабораторных стендов в учебных заведениях. Однако пользование лабораторными стендами ограничено по времени, поскольку их в учебном заведении не бесчисленное количество и при проведении работ необходимо присутствие ответственного лица — преподавателя или лаборанта. Также моделирование позволяет изучить процессы, происходящие в любом желаемом двигателе, для расчета параметров схемы замещения которого необходимы только каталожные данные, предоставляемые производителем. В данной статье и будут рассмотрены различные способы расчета параметров схемы замещения асинхронных двигателей.
Как было сказано ранее, параметры схемы замещения, необходимые для моделирования, возможно рассчитать при помощи каталожных данных двигателя, предоставляемых производителями асинхронных двигателей. Данные способы не претендуют на высокую точность результатов моделирования, но позволяют довольно достоверно оценить даже переходные процессы в двигателях. Конечно, существуют более точные способы расчета, которые позволяют производить более точное моделирование, однако они требуют большего количества данных асинхронной машины, которые обычно не предоставляются современными производителями. Например, в справочнике [2] имеются все параметры схемы замещения, однако данный справочник описывает определенную серию двигателей советского производства, которые не всегда могут являться исследуемым двигателем, хотя и обладают высокой распространенностью на территории России.
Для осуществления моделирования используется компьютерная программа MATLAB Simulink. Данная программа с огромным количеством прикладных пакетов позволяет проводить исследования в различных сферах науки от нейронных сетей до моделирования финансовых прогнозов. Также есть дополнительный пакет SimPowerSystems содержащий в себе большое количество готовых блоков для разрабатывания схем моделирования работы электрических систем. Схема моделирования представлена на рисунке ниже.
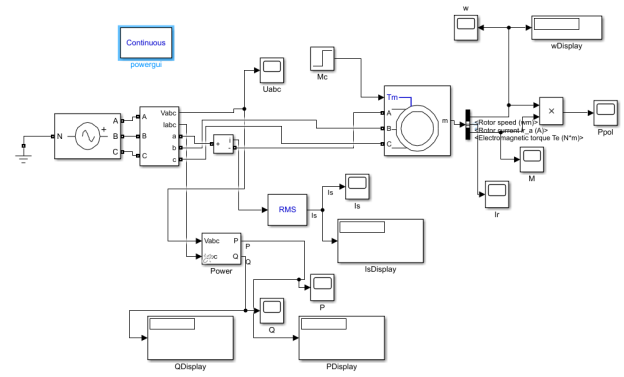
Рис. 1. Схема моделирования в MATLAB
Исследуемым двигателем был выбран двигатель высокой мощности и высокого питающего напряжения по следующим причинам:
- Двигатели высокой мощности невозможно исследовать на лабораторных стендах ввиду их отсутствия, поскольку они являются очень дорогими устройствами.
- Проверить возможность расчета параметров схемы замещения по каталожным данным достоверно отображать поведение двигателей при моделировании, так как обычно этими методами исследуются двигатели средней мощности и питанием напряжения от сети 380 Вольт.
Каталожные параметры исследуемого двигателя, питающегося от сети напряжением Uлн=10000 Вольт и частотой f1=50 Герц приведены в таблице ниже:
Паспортные данные асинхронного двигателя Siemens 1RA4 452–4HE80
 , кВт
, кВт
 , об/мин
, об/мин
 , %
, %
 , о.е.
, о.е.
 , А
, А
 , о.е.
, о.е.
 , о.е.
, о.е.
 , о.е.
, о.е.
Опытное определение параметров схемы замещения асинхронной машины.
Расчёт характеристик асинхронной машины будет более достоверным, если в их основу положить параметры схемы замещения, определяемые опытным путём.
Активное сопротивление обмотки статора  легко измерить ввиду доступности выводов статора. Остальные параметры асинхронной машины могут быть определены на основе несложных опытов холостого хода и короткого замыкания.
легко измерить ввиду доступности выводов статора. Остальные параметры асинхронной машины могут быть определены на основе несложных опытов холостого хода и короткого замыкания.
Режим холостого хода двигателя – это режим его работы без нагрузки на валу. Скольжение ротора в этом случае близко к нулю (S=0). Развиваемый двигателем электромагнитный момент  преодолевает лишь моменты от сил трения и момент сопротивления вентилятора, обдувающего двигатель. По сравнению с номинальным моментом величина
преодолевает лишь моменты от сил трения и момент сопротивления вентилятора, обдувающего двигатель. По сравнению с номинальным моментом величина  очень мала (
очень мала (  ). Ток ротора в этом режиме тоже близок к нулю (I / 2≈0). Мощность, потребляемая двигателем из сети Р10, переходит в потери: электрические в статорной обмотке Рэл1=m1 I 2 R1; в стали статора Рст1 и механические Рмех:
). Ток ротора в этом режиме тоже близок к нулю (I / 2≈0). Мощность, потребляемая двигателем из сети Р10, переходит в потери: электрические в статорной обмотке Рэл1=m1 I 2 R1; в стали статора Рст1 и механические Рмех:
Если у трансформатора величина тока холостого хода составляет несколько процентов от номинального, то в асинхронном двигателе – несколько десятков процентов (до 70…80% у многополюсных двигателей небольшой мощности).
Режим холостого хода позволяет определить сумму индуктивных сопротивлений статорной обмотки и намагничивающего контура схемы замещения
а также активное сопротивление намагничивающего контура схемы замещения
В опыте холостой ход измеряют мощность, потребляемую двигателем Р10, ток обмотки статора I и напряжение U1, приложенное к ней. Последнее обычно меняют в пределах (0,4…1,2) U1н, если желательно определить параметры х.х. при различных насыщениях магнитной цепи двигателя.
При известном сопротивление R1 вычисляют мощность Рхх = Рст1+Рмех = Р10 – m1I 2 R1, а затем строят зависимость  (Рис. 3.11).
(Рис. 3.11).
Поскольку потери в стали пропорциональны квадрату индукции (или квадрату приложенного напряжения), а механические потери остаются при изменении напряжения постоянными, зависимость (Рст1+Рмех) = f(U1 2 ) очень близка к прямой. Продолжая на графике эту прямую до пересечения с осью ординат, определяем Рмех. Таким образом определяют суммарные потери в стали Рст1 и механические Рмех, при этом потери в стали могут быть вычислены при любом напряжении.
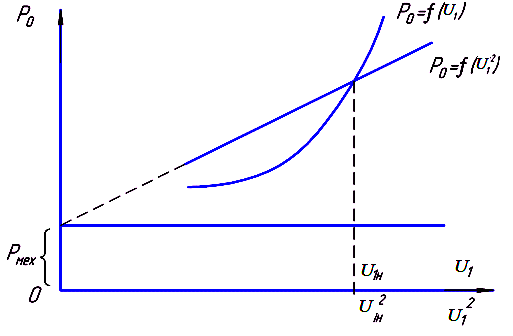
Рисунок 3.11 Зависимость потерь в стали и механических потерь от приложенного напряжения
Режим короткого замыкания асинхронного двигателя возникает в том случае когда ротор заторможен, S = 1. Опыт короткого замыкания проводят при пониженном значении подводимого напряжения U1, так чтобы ток статора I1k находился в пределах (0,25…1,25)I1н. По измеренным величинам напряжения U1, тока статора I1k и потребляемой мощности Р1к находят:
полное сопротивление короткого замыкания

активное сопротивление короткого замыкания
 ;
;
индуктивное сопротивление короткого замыкания
При измеренной величине R1 можно найти значение приведённого активного сопротивления обмотки ротора R2 1 = Rk — R1. Принимая в режиме опыта к.з.

 находят значение Х1 и Х2 ‘ .
находят значение Х1 и Х2 ‘ .
Из данных опытов холостой ход и короткое замыкание определяют значение индуктивного сопротивления контура намагничивания:
 .
.
На рисунке 3.12 показана зависимость I1k = f(U1).
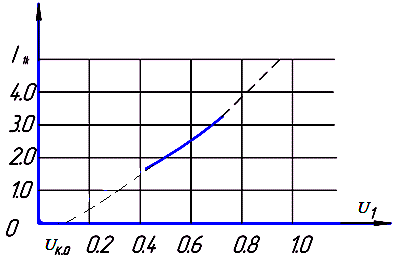
Рисунок 3.12 Зависимость тока статора в режиме короткого замыкания от приложенного напряжения
Эта зависимость, при токах I1k> I1н. Вогнутость начальной части кривой I1k = f(U1) объясняется уменьшением сопротивления Х1 и Х2 ‘ вследствие увеличения насыщение зубцовых слоёв возрастающими потоками рассеяния.
Величину тока короткого замыкания при номинальном напряжении, равную величине начального пускового тока двигателя I1кн=I1п определяют по выражению:
 ,
,
где  — ток короткого замыкания при наибольшем напряжении, достигнуто в опыте;
— ток короткого замыкания при наибольшем напряжении, достигнуто в опыте;
 — смотри рис 3.12.
— смотри рис 3.12.
Предполагая, что практически отношение токов короткого замыкая пропорционально напряжениям, мощность Р1к пересчитывают пропорционально квадрату напряжений:
Дата добавления: 2015-09-18 ; просмотров: 1867 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ