AVR Урок 18. Подключаем шаговый двигатель. Часть 1
Урок 18
Подключаем шаговый двигатель
Сегодня мы попробуем к микроконтроллеру Atmega8a подключить шаговый двигатель.
Шаговые двигатели – это такие двигатели, которые посредством подачи напряжения на определённую обмотку переводят свой ротор в определённое место, тем самым достигается более точное управление угловой скоростью. Можно также, в принципе, управлять и положением ротора, но это уже как-то больше сервоприводы, с которыми, мы, возможно, тоже, когда-то столкнёмся.
Шаговые двигатели в наше время приобретают всё больший интерес, так как в наш век точной электроники люди что-то мастерят движущееся, наподобие роботов и каких-то умных машин, также доходит дело до определённых летательных аппаратов и прочих устройств.
Поэтому я также не обошел этот вопрос стороной и решил также что-то об этом рассказать и подключить шаговый двигатель к контроллеру и попробовать им поуправлять. Как только мне это удалось, я решил этим поделиться и с вами.
Мне в руки попался именно вот такой вот шаговый двигатель 28-BJ48 компании Kiatronics

Питается данный двигатель от 5 вольт, питание подается попеременно на различные обмотки, которых 4, и если питание снимается с одной обмотки и подается на другую, то ротор. соответственно. устраемляется к ней.
Данные обмотки своими сердечниками в статоре находятся не в 4 местах, а намного чаще, а именно каждая повторяется 2048 раз, поэтому когда мы подаем напряжение на соседнюю обмотку, ротор поворачивается на очень малый угол. А если напряжение подавать ещё и на 2 соседние обмотки, то ротор можно расположить между ними, и количество положений при этом вообще удваивается. А есть вообще микрошаговый режим, когда мы на одну обмотку подаём меньшее напряжение, а на другую большее, то и вообще можно потеряться в количестве шагов и вообще крутить данный шаговый двигатель очень плавно.
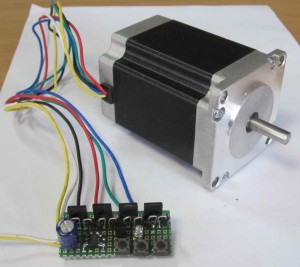
Питать двигатель лучше не от ножек контроллера, а лучше через какую-нибудь развязку. Можно использовать мощные транзисторы, но существует специальная микросхема-драйвер для шаговых двигателей. Как правило, выпускается данный драйвер в виде готовых модулей, выглядящих приблизительно вот так вместе с подключенным шаговым двигателем

Данный модуль представляем собой микросхему ULN2003. Можно использовать ее не только для двигателей. Но мы будем использовать здесь 4 входа и 4 выхода, так как у нашего двигателя 4 провода. каждый из которых подключен к определённой обмотке, а пятый провод является общим. Подключенный таким образом мотор уже не влияет на ножки портов, у которых ограничен максимальный ток и можно уже ничего не бояться на этот счёт. При подключении к ножкам контроллера мы используем входы модуля IN1, IN2, IN3 и IN4, а разъём двигателя просто соединим с разъёмом модуля.
Нарисуем вот такую схему, чтобы лучше понять принцип работы двигателя (чтобы увидеть процесс рисования, смотрите видеоверсию урока, ссылка на которую внизу страницы)
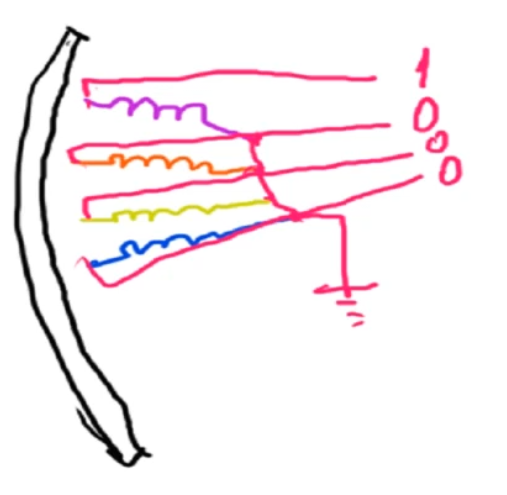
Здесь мы видим 4 катушки, одним выводом которые соединены к общему проводу, а на другие выводы каждой катушки мы будем подавать логические уровни, например на рисунке поданы 1000.
Данные обмотки потом по кругу так циклически и повторяются.
Теперь рассмотрим возможные режимы управления с помощью логических уровней.
1 режим – этот простейший режим, при котором мы по очереди подаём логические единицы или высокие логические уровни на каждую обмотку. Называется он также полношаговый режим или One Phase Step Mode.
Схематично данный режим можно изобразить таким образом

Существует также ещё один интересный режим – это режим когда ротор будет шагать между обмотками, то есть мы единички будем подавать на 2 соседние обмотки

А также есть ещё и третий решим – это полушаговый режим, когда мы уже чередуем комбинации, сначала ротор будет находиться у обмотки, потом наполовину переместится к соседней обмотке, потом совсем к соседней обмотке и т.д. Это полушаговый режим или one and two-phase-on

Вот таких вот три режима существуют. мы остановимся на 3 режиме, так как он будет самый плавный и самый интересный.
На следующем занятии мы соберём всю нашу схему с шаговым двигателем и начнём уже писать какой-то исходный код.
Программатор и шаговый двигатель 28YBJ-48 с драйвером ULN2003 можно приобрести здесь:
Смотреть ВИДЕОУРОК (нажмите на картинку)
ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ
Блог технической поддержки моих разработок
Простой контроллер шагового двигателя на PIC12F629
В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение (прошивка) для него.
Общее описание.
Контроллер шагового двигателя разработан на PIC контроллере PIC12F629. Это 8 выводной микроконтроллер стоимостью всего 0,5 $. Несмотря на простую схему и низкую стоимость комплектующих, контроллер обеспечивает довольно высокие характеристики и широкие функциональные возможности.
- Контроллер имеет варианты схем для управления как униполярным, так и биполярным шаговым двигателем.
- Обеспечивает регулировку скорости вращения двигателя в широких пределах.
- Имеет два режима управления шаговым двигателем:
- полношаговый;
- полушаговый.
- Обеспечивает вращение в прямом и реверсивном направлениях.
- Задание режимов, параметров, управление контроллером осуществляется двумя кнопками и сигналом ВКЛ (включение).
- При выключении питания все режимы и параметры сохраняются в энергонезависимой памяти контроллера и не требуют переустановки при включении.
Контроллер не имеет защиты от коротких замыканий обмоток двигателя. Но реализация этой функции значительно усложняет схему, а замыкание обмоток – случай крайне редкий. Я с таким не сталкивался. К тому же механическая остановка вала шагового двигателя во время вращения не вызывает опасных токов и защиты драйвера не требует.
Про режимы и способы управления шаговым двигателем можно почитать здесь, про дайверы здесь.
Схема контроллера униполярного шагового двигателя с драйвером на биполярных транзисторах.
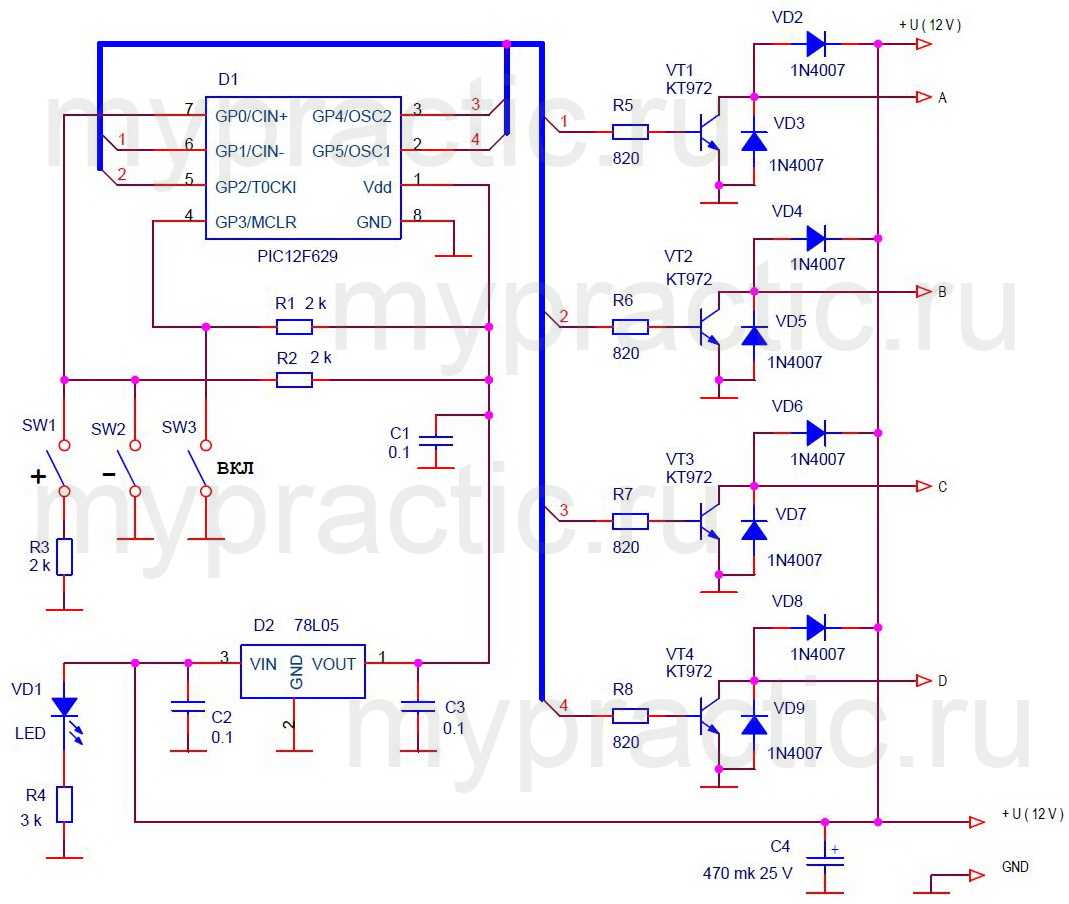
Объяснять в схеме особенно нечего. К PIC контроллеру подключены:
- кнопки «+» и «–» (через аналоговый вход компаратора);
- сигнал ВКЛ (включение двигателя);
- драйвер ( транзисторы VT1-Vt4 , защитные диоды VD2-VD9).
PIC использует внутренний генератор тактирования. Режимы и параметры хранятся во внутреннем EEPROM.
Схема драйвера на биполярных транзисторах КТ972 обеспечивает ток коммутации до 2 А, напряжение обмоток до 24 В.
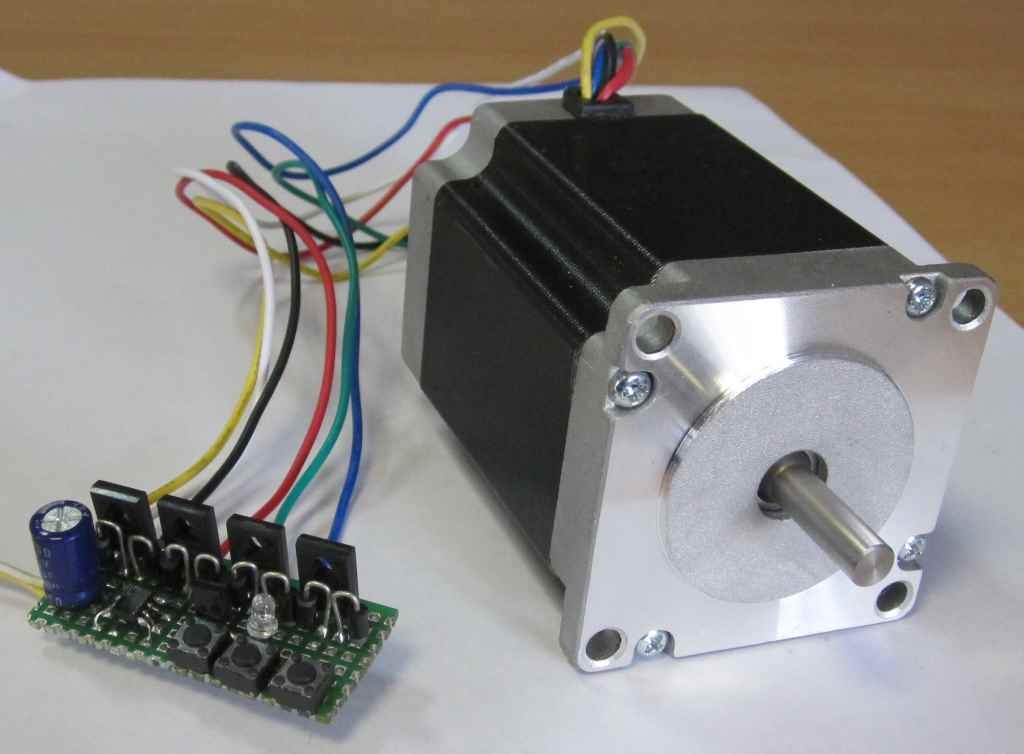
Я спаял контроллер на макетной плате размерами 45 x 20 мм.

Если ток коммутации не превышает 0,5 А, можно использовать транзисторы серии BC817 в корпусах SOT-23. Устройство получится совсем миниатюрным.
Программное обеспечение и управление контроллером.
Резидентное программное обеспечение написано на ассемблере с циклической переустановкой всех регистров. Программа зависнуть в принципе не может. Загрузить программное обеспечение (прошивку) для PIC12F629 можно здесь.
Управление контроллером достаточно простое.
- При активном сигнале «ВКЛ» (замкнут на землю) двигатель крутится, при неактивном (оторван от земли) – остановлен.
- При работающем двигателе ( сигнал ВКЛ активен) кнопки «+» и «–» меняют скорость вращения.
- Каждое нажатие на кнопку «+» увеличивает скорость на минимальную дискретность.
- Нажатие кнопки «–» — уменьшает скорость.
- При удержании кнопок «+» или «–» скорость вращения плавно увеличивается или уменьшается, на 15 значений дискретности в сек.
- При остановленном двигателе ( сигнал ВКЛ не активен).
- Нажатие кнопки «+» задает режим вращения в прямом направлении.
- Нажатие кнопки «–» переводит контроллер в режим реверсивного вращения.
- Для выбора режима – полношаговый или полушаговый необходимо при подаче питания на контроллер удерживать кнопку «–» в нажатом состоянии. Режим управления двигателем будет изменен на другой (проинвертирован). Достаточно выдержать кнопку – нажатой в течение 0,5 сек.
Схема контроллера униполярного шагового двигателя с драйвером на MOSFET транзисторах.
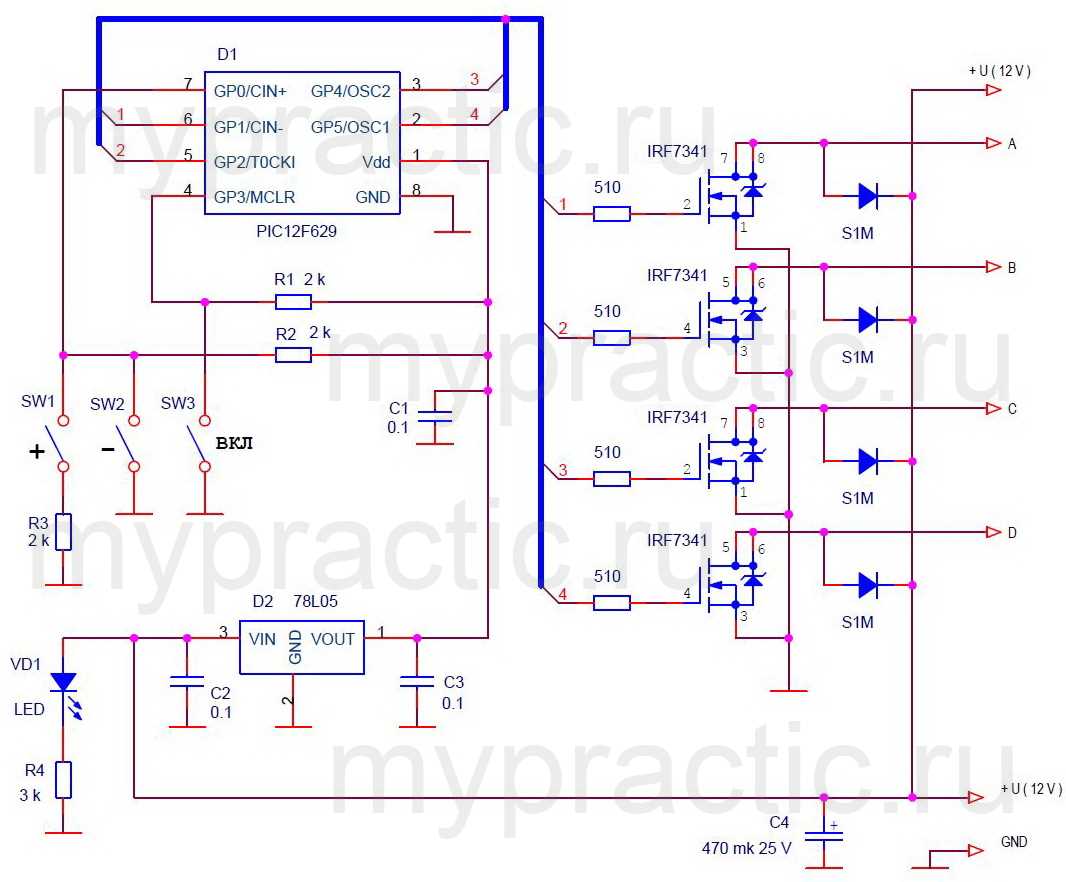
Низкопороговые MOSFET транзисторы позволяют создать драйвер с более высоким параметрами. Применение в драйвере MOSFET транзисторов, например, IRF7341 дает следующие преимущества.
- Сопротивление транзисторов в открытом состоянии не более 0,05 Ом. Значит малое падение напряжения (0,1 В при токе 2 А), транзисторы не греются, не требуют радиаторов охлаждения.
- Ток транзисторов до 4 А.
- Напряжение до 55 В.
- В одном 8 выводном корпусе SOIC-8 размещены 2 транзистора. Т.е. на реализацию драйвера потребуется 2 миниатюрных корпуса.
Таких параметров невозможно достичь на биполярных транзисторах. При токе коммутации свыше 1 А настоятельно рекомендую вариант утройства на MOSFET транзисторах.
Подключение к контроллеру униполярных шаговых двигателей.
В униполярном режиме могут работать двигатели с конфигурациями обмоток 5, 6 и 8 проводов.
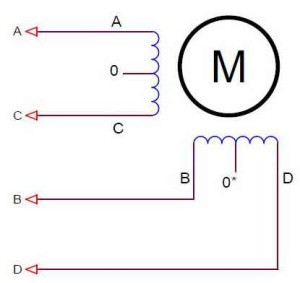
Схема подключения униполярного шагового двигателя с 5 и 6 проводами (выводами).
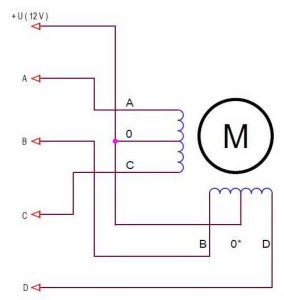
Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 6 проводов выводы промаркированы следующим цветами.
| Обозначение вывода на схеме | Цвет провода |
| A | черный |
| желтый | |
| C | зеленый |
| B | красный |
| 0* | белый |
| D | синий |
Конфигурация с 5 проводами это вариант, в котором общие провода обмоток соединены внутри двигателя. Такие двигатели бывают. Например, PM35S-048.

Документацию по шаговому двигателю PM35S-048 в PDF формате можно загрузить здесь.
Схема подключения униполярного шагового двигателя с 8 проводами (выводами).
То же самое как и для предыдущего варианта, только все соединения обмоток происходят вне двигателя.
Как выбирать напряжение для шагового двигателя.
По закону Ома через сопротивление обмотки и допустимый ток фазы.
U = Iфазы * Rобмотки
Сопротивление обмотки постоянному току можно измерить, а ток надо искать в справочных данных.
Подчеркну, что речь идет о простых драйверах, которые не обеспечивают сложную форму тока и напряжения. Такие режимы используются на больших скоростях вращения.
Как определить обмотки шаговых двигателей, если нет справочных данных.
В униполярных двигателях с 5 и 6 выводами, средний вывод можно определить, измерив, сопротивление обмоток. Между фазами сопротивление будет в два раза больше, чем между средним выводом и фазой. Средние выводы подключаются к плюсу источника питания.
Дальше любой из фазных выводов можно назначить фазой A. Останется 8 вариантов коммутаций выводов. Можно их перебрать. Если учесть, что обмотка фазы B имеет другой средний провод, то вариантов становится еще меньше. Попутка обмоток фаз не ведет к выходу из строя драйвера или двигателя. Двигатель дребезжит и не крутится.
Только надо помнить, что к такому же эффекту приводит слишком высокая скорость вращения (выход из синхронизации). Т.е. надо скорость вращения установить заведомо низкую.
Схема контроллера биполярного шагового двигателя с интегральным драйвером L298N.
Биполярный режим дает два преимущества:
- может быть использован двигатель с почти любой конфигурацией обмоток;
- примерно на 40% повышается крутящий момент.
Создавать схему биполярного драйвера на дискретных элементах – дело неблагодарное. Проще использовать интегральный драйвер L298N. Описание на русском языке есть здесь.
Схема контроллера с биполярным драйвером L298N выглядит так.
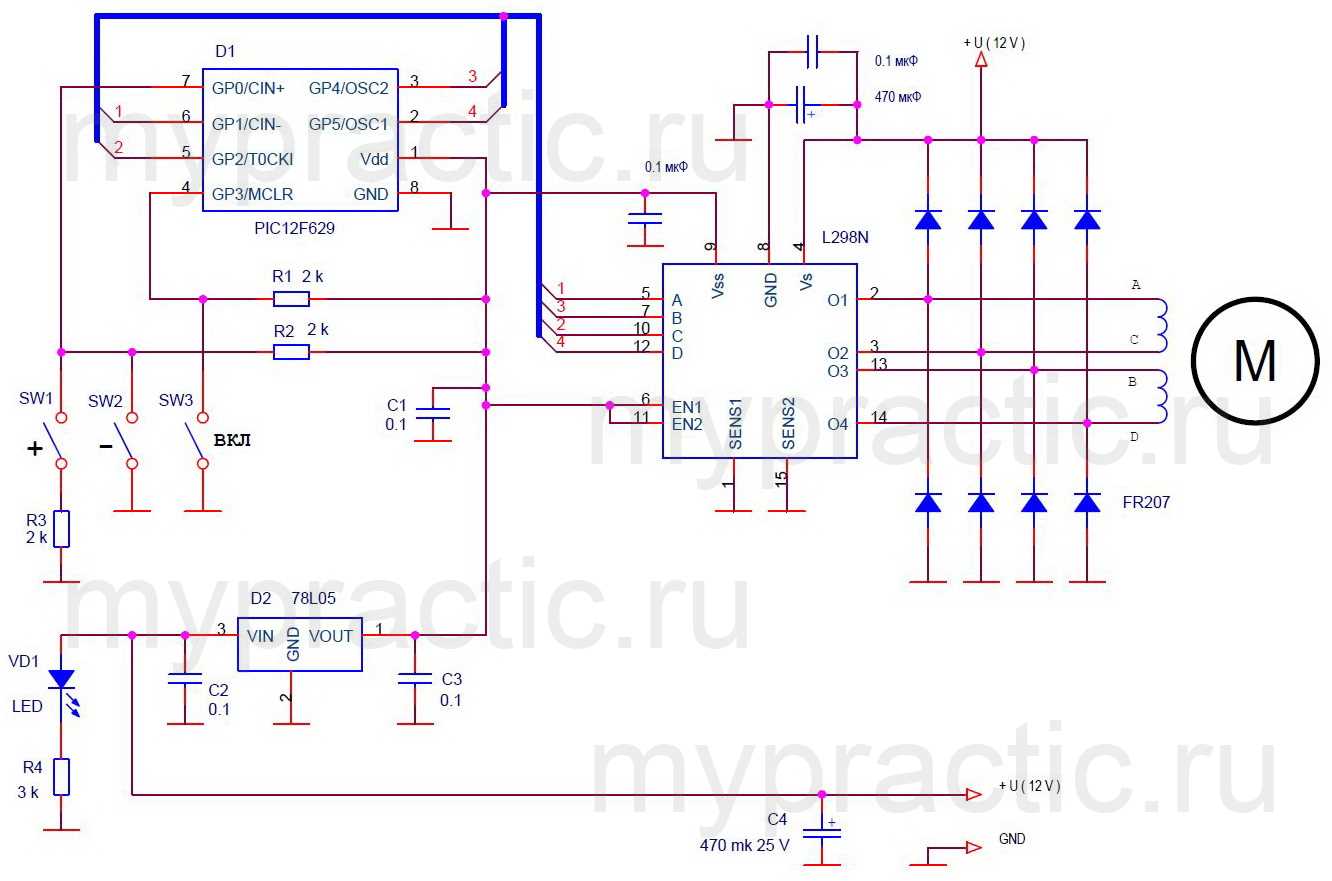
Драйвер L298N включен по стандартной схеме. Такой вариант контроллера обеспечивает фазные токи до 2 А, напряжение до 30 В.
Подключение к контроллеру биполярных шаговых двигателей.
В этом режиме может быть подключен двигатель с любой конфигурацией обмоток 4, 6, 8 проводов.
Схема подключения биполярного шагового двигателя с 4 проводами (выводами).
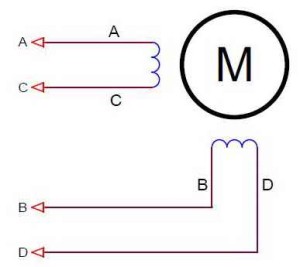
Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 4 провода выводы промаркированы следующим цветами.
| Обозначение вывода на схеме | Цвет провода |
| A | черный |
| C | зеленый |
| B | красный |
| D | синий |
Схема подключения биполярного шагового двигателя с 6 проводами (выводами).
Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с такой конфигурацией обмоток выводы промаркированы следующим цветами.
| Обозначение вывода на схеме | Цвет провода |
| A | черный |
| C | зеленый |
| B | красный |
| D | синий |
Такая схема требует напряжения питания в два раза большего по сравнению с униполярным включением, т.к. сопротивление обмоток в два раза больше. Скорее всего, контроллер надо подключать к питанию 24 В.
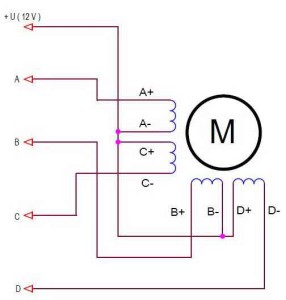
Схема подключения биполярного шагового двигателя с 8 проводами (выводами).
Может быть два варианта:
- с последовательным включением
- с параллельным включением.
Схема последовательного включения обмоток.
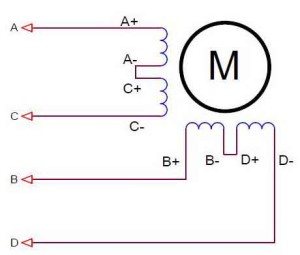
Схема с последовательным включением обмоток требует в два раза большего напряжения обмоток. Зато не увеличивается ток фазы.
Схема параллельного включения обмоток.
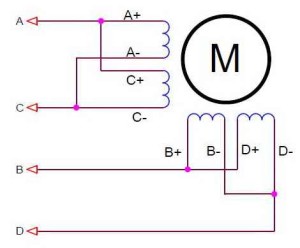
Схема с параллельным включением обмоток увеличивает в 2 раза фазные токи. К достоинствам этой схемы можно отнести, низкую индуктивность фазных обмоток. Это важно на больших скоростях вращения.
Т.е. выбор между последовательным и параллельным включением биполярного шагового двигателя с 8 выводами определяется критериями:
- максимальный ток драйвера;
- максимальное напряжение драйвера;
- скорость вращения двигателя.
Программное обеспечение (прошивка) для PIC12F629 можно загрузить здесь.