Возбуждение двигателя постоянного тока. Схемы возбуждения.
Возбуждение двигателя постоянного тока является отличительной особенностью таких двигателей. От типа возбуждения зависят механические характеристики электрических машин постоянного тока. Возбуждение может быть параллельным последовательным смешанным и независимым. Тип возбуждения означает, в какой последовательности включены обмотки якоря и ротора.
При параллельном возбуждении обмотки якоря и ротора включаются параллельно друг другу к одному источнику тока. Так как у обмотки возбуждения больше витков чем у якорной то и ток в ней течет незначительный. В цепи, как обмотки ротора, так и обмотки якоря могут включаться регулировочные сопротивления.
Обмотка возбуждения может подключаться и к отдельному источнику тока. В этом случае возбуждение будет называться независимым. У такого двигателя характеристики будут схожи с двигателем, в котором применяется постоянный магнит. Скорость вращения двигателя с независимым возбуждением, как и у двигателя с параллельным возбуждением зависит от тока якоря и основного магнитного потока. Основной магнитный поток создается обмоткой ротора.
Скорость вращения можно регулировать с помощью реостата включенного в цепь якоря изменяя тем самым ток в нем. Также можно регулировать ток возбуждения, но здесь нужно быть осторожным. Так как при его чрезмерном уменьшении или полном отсутствии в результате обрыва питающего провода ток в якоре может возрасти до опасных значений.
Также при малой нагрузке на валу или в режиме холостого хода скорость вращения может настолько увеличится, что может привести к механическому разрушению двигателя.
Если обмотка возбуждения включена последовательно с якорной, то такое возбуждение называется последовательным. При этом через якорь и обмотку возбуждения протекает один и тот же ток. Таким образом, магнитный поток изменяется с изменением нагрузки двигателя. А следовательно скорость двигателя будет зависеть от нагрузки.
Двигатели с таким возбуждением нельзя запускать на холостом ходу либо с небольшой нагрузкой на вал. Их применяют в том случае если, требуется большой пусковой момент или способность выдерживать кратковременные перегрузки.
При смешанном возбуждении используются двигатели, у которых на каждом полюсе есть по две обмотки. Их можно включить так чтобы магнитные потоки как складывались, так и вычитались.
В зависимости от того как соотносятся магнитные потоки двигатель с таким возбуждением может работать как двигатель с последовательным так и двигатель с параллельным возбуждением. Все зависит от ситуации, если нужен большой стартовый момент, такая машина работает в режиме согласного включения обмоток. Если же необходима постоянная скорость вращения, при динамически изменяющейся нагрузке применяют встречное включение обмоток.
В машинах постоянного тока можно изменять направление движения ротора. Для этого необходимо изменить направление тока в одной из обмоток. Якорной либо возбуждения. Изменением полярности направление вращения двигателя можно добиться только в двигателе с независимым возбуждением, или в котором используется постоянный магнит. В других схемах включения нужно переключать одну из обмоток.
Стартовый ток в машине постоянного тока достаточно велик, поэтому ее следует запускать с добавочным реостатом, чтобы избежать повреждения обмоток.
Управление возбуждением двигателей постоянного тока
Управление двигателями постоянного тока
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого (рис.1), параллельного (рис.2), последовательного (рис.3) и смешанного (рис.4) возбуждения. При параллельном, последовательном и смешанном возбуждении напряжение на обмотке возбуждения зависит от напряжения на обмотке якоря, при независимой системе возбуждения, обмотка возбуждения питается от дополнительного источника постоянного тока и не зависит от режима работы и нагрузки двигателя.
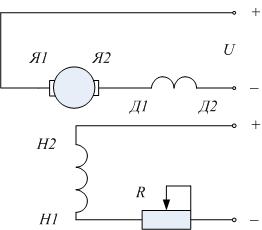 Рис.1 Схема независимого возбуждения
Рис.1 Схема независимого возбуждения
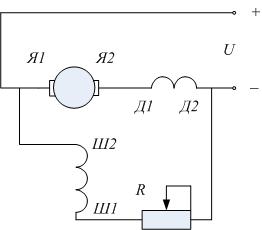 Рис.2 Схема параллельного возбуждения
Рис.2 Схема параллельного возбуждения
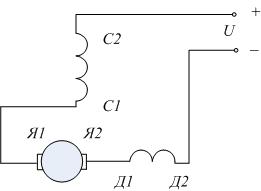 Рис.3 Схема последовательного возбуждения
Рис.3 Схема последовательного возбуждения
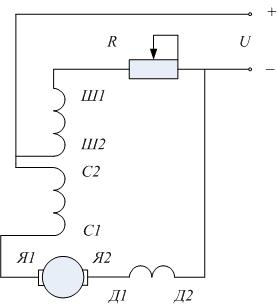 Рис.4 Схема смешанного возбуждения
Рис.4 Схема смешанного возбуждения
Для регулирования скорости двигателей постоянного тока применяют различные способы.
В общем случае скорость двигателя определяется выражением:

Как видно из выражения (1.1), регулировать скорость двигателя постоянного тока возможно двумя способами:
— Изменением питающего напряжения U
— Изменением магнитного потока машины Ф (изменением тока возбуждения)
Раньше регулирование питающего напряжения встречало трудности связанные с преобразованием напряжения постоянного тока, изменение скорости вращения двигателя осуществлялось с помощью включения в цепь якоря дополнительного регулировочного реостата. Основными недостатками этого метода являются потери в реостате, через который протекает ток полной нагрузки двигателя, неудобство управления.
Наиболее удобным, распространенным и экономичным способом регулирования скорости вращения двигателя постоянного тока, является изменение магнитного потока машины (изменение тока возбуждения). Экономия связана с тем, что в данном случае управлять можно не большим током якоря, а малым током возбуждения, что уменьшает потери и удешевляет систему управления. Однако этот способ позволяет лишь увеличивать скорость вращения двигателя.
Согласно выражению (1.1), с уменьшением Ф скорость возрастает (рис.5). Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Ф, т. е. с наименьшей величиной n. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, и потери при регулировании минимальны. Максимальная скорость вращения в данном случае ограничивается механической прочностью машины и условиями ее коммутации.
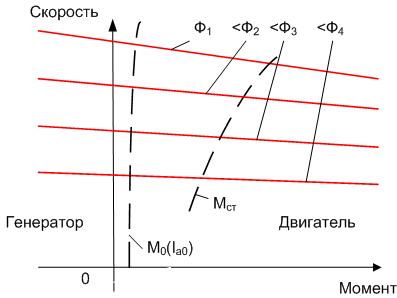
Рис.5 Характеристики ДПТ при регулировании тока возбуждения
Современные способы регулирования скорости двигателей постоянного тока
Сегодня основным средством управления двигателями постоянного тока становятся современные тиристорные регуляторы (назовем их “приводы постоянного тока”), их производят множество фирм, специализирующихся на приводной технике (например, Control Techniques, Siemens, Sprint-Electric и т.д.). Современные приводы постоянного тока позволяют управлять не только скоростью вращения двигателя, но и его моментом (например, на линиях намотки). За счет различных интерфейсов обмена сигналами с автоматизированной системой управления, изменять параметры работы двигателя достаточно просто и удобно.
Приводы постоянного тока могут работать как в одном квадранте, так и во всех четырех, при этом изменяя не только ток обмотки якоря, но и ток обмотки возбуждения — многие приводы имеют встроенные “контроллеры поля”, что дает возможность регулировать скорость двигателя в самом широком диапазоне.
Следует отметить, что “ослабление” поля при задании скорости двигателя выше номинальной, привод производит автоматически, контроллер поля представляет собой тот же тиристорный регулятор. Встроенные контроллеры поля имеют приводы Mentor, Mentor MP (Control Techniques), PL, PLX (Sprint-Electric). Остальные модели приводов постоянного тока этих брендов для питания обмотки возбуждения двигателей имеют неуправляемые выпрямители.
Номинальный ток контроллеров возбуждения приводов постоянного тока имеют следующие значения:
Sprint-Electric PL, PLX — 8A (для приводов с номинальным током якоря 12-123A), 16A (для приводов с номинальным током якоря 155-330A), 32A (для приводов с номинальным током якоря 430-630A).
Control Techniques Mentor — M25(R) — M210(R) — 8 А, остальные габариты с неуправляемым выпрямителем.
Control Techniques Mentor MP —
MP25Ax(R), MP45Ax(R), MP75Ax(R), MP105Ax(R), MP155Ax(R), MP210Ax(R) — 8А
MP350Ax(R), MP420Ax(R), MP550Ax(R), MP700Ax(R), MP825Ax(R), MP900Ax(R) — 10A
MP1200Ax(R), MP1850Ax(R) — 20А.
Для токов обмотки возбуждения имеющих значение свыше 8А, Control Techniques предлагает внешние контроллеры поля, которые связываются с приводом постоянного тока по цифровой шине — это контроллеры FXM-5 (до 90А) и FXMP-25 (до 25А).
На практике часто встречаются двигатели с низковольтными обмотками возбуждения с большими токами. В данном случае, для изменения тока можно применить приводы постоянного тока, при этом вместо обмотки якоря подключить обмотку возбуждения. Это может быть любой аналоговый или цифровой привод постоянного тока. При использовании в качестве регуляторов поля простых аналоговых преобразователей Sprint-Electric (модели 340, 680, 1220, 340i, 680i, 1220i, 370, 370E, 400E, 800E, 1200E, 400, 800, 1200, 400i, 1600i, 3200i, SL, SLE), производитель рекомендует настраивать их в режим управления моментом.
Привод Mentor MP (Control Techniques) имеет для этого специальный режим.
Электропривод с двигателями постоянного тока (стр. 10 )
 | Из за большого объема этот материал размещен на нескольких страницах: 1 2 3 4 5 6 7 8 9 10 |

Схемы с шунтированием якоря ДПТ последовательного возбуждения применяются для обеспечения низких скоростей движения, а также получения определенной скорости идеального холостого хода ДПТ последовательного возбуждения. Такие схемы нашли применение в электрическом транспорте, электроприводе грузоподъемных машин и ряде других случаев.
3.19. ТОРМОЖЕНИЕ ДПТ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ
Для ДПТ последовательного возбуждения возможны два варианта тормозного режима: при его работе генератором последовательно с сетью (режим торможения противовключением) и независимо от сети (режим динамического торможения).
Торможение противовключением ДПТ последовательного возбуждения, как и для ДПТ независимого возбуждения, может быть осуществлено двумя путями. Один из них связан с изменением полярности напряжения на обмотке якоря при сохранении того же направления тока в обмотке возбуждения. Одновременно с этим для ограничения переходного тока в цепь якоря ДПТ вводится дополнительный резистор R д .
В результате выполнения этих операций ДПТ (рис. 381) перейдет с естественной характеристики 1 на характеристику 2, участок b с которой соответствует режиму торможения противовключением.
Торможение противовключением также реализуется в том случае, когда ДПТ последовательного возбуждения будет нагружен активным моментом Мс, превышающим момент короткого замыкания М к ,з . Рассмотрим этот способ с помощью рис. 3.81.

Допустим, что ДПТ в исходном режиме работает в точке а на характеристике 1, преодолевая активный момент нагрузки Мс. Если теперь, не изменяя полярность напряжения на ДПТ, ввести в его якорную цепь дополнительный резистор R д , то ДПТ будет иметь характеристику вида 3. Так как момент ДПТ при этом стал меньше момента нагрузки, то он начнет вначале тормозиться, а затем и разгоняться в противоположном направлении, пока в точке d моменты нагрузки Мс и ДПТ не сравняются. Двигатель при этом будет работать в режиме торможения противовключением.

Динамическое торможение ДПТ последовательного возбуждения реализуется в двух схемах его включения.
В первой схеме (рис. 3 82, а) обмотка возбуждения ОД через дополнительный резистор R в подключается к источнику постоянного тока, а обмотка якоря замыкается на резистор R д . Получается схема, типичная для ДПТ независимого возбуждения, в которой ДПТ последовательного возбуждения имеет характеристики, изображенные на рис. 3.82, б.
Специфичным для ДПТ последовательного возбуждения является динамическое торможение с самовозбуждением, которое реализуется по схеме рис. 3.83. Для возникновения и существования режима самовозбуждения необходимо выполнение следующих условий: 1) наличие остаточного магнитного потока в ДПТ Фост; 2) совпадение по направлению Фост и магнитного потока Ф, создаваемого током возбуждения; 3) замкнутая цепь якоря; 4) скорость ДПТ должна быть отличной от нуля;

5) наводимая в якоре ЭДС должна быть равна суммарному падений напряжения в резисторах якорной цепи, т. е. E = IR .
При выполнении этих условий торможение самовозбуждением происходит следующим образом Вследствие наличия остаточного магнитного поля при вращении якоря в нем наводится ЭДС, под действием которой по якорю и обмотке возбуждения ДПТ протекает ток. Этот ток создает основной магнитный поток Ф, который, совпадая по направлению с остаточным потоком Фост, приведет к увеличению ЭДС. Это, в свою очередь, повлечет за собой увеличение тока в ДПТ, и такой процесс самовозбуждения ДПТ будет продолжаться до тех пор, пока ЭДС не станет равной суммарному падению напряжения в цепи якоря.

Статические характеристики ДПТ последовательного возбуждения в этом режиме можно получить графоаналитическим способом, использовав условие E = IR . Для этого на одной плоскости (рис. 3.84, а) совмещаются характеристики холостого хода Е( I ), представляющие собой зависимость ЭДС машины от тока возбуждения при фиксированной скорости якоря w = const , и вольт-амперная характеристика цепи якоря IR ( I ) .
Точки пересечения этих характеристик соответствуют установившемуся режиму при данных параметрах цепи якоря ДПТ и его скорости. Так, при суммарном сопротивлении цепи якоря R 1 точками установившегося режима являются точки 1 2 и 3, а при другом, большем сопротивлении цепи якоря R 2 > R 1 – точки 4 и 5.
Если теперь использовать координаты этих точек установившегося режима, а именно значения скорости и тока, то можно получить искомые статические электромеханические характеристики ДПТ. На рис. 3.84, б выполнено это построение, в результате которого получены электромеханические характеристики для двух принятых значений суммарного сопротивления цепи якоря R 1 и R 2. Механические характеристики ДПТ последовательного возбуждения могут быть получены из электромеханических характеристик при использовании универсальных характеристик.
Отметим, что для режима торможения с самовозбуждением существует определенное критическое сочетание параметров, соответствующее границе этого режима. Такому критическому сочетанию на рис. 3.84, а при сопротивлении цепи якоря R1 соответствует скорость w 4 = w кр1 (при сопротивлении R 2 – скорость w 3 = w кр2 ). При меньших скоростях самовозбуждение ДПТ не наступает.
Режим торможения с самовозбуждением используется для интенсивного электрического торможения в электроприводах транспортных в грузоподъемных машин.
3.20. СХЕМА УПРАВЛЕНИЯ ДПТ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ
Релейно-контакторные схемы управления ДПТ последовательного возбуждения при пуске, реверсе и торможении выполняются по тем же принципам времени, скорости (ЭДС), тока и пути, что и для других видов ДПТ. Многие типовые узлы, которые были рассмотрены ранее, могут быть использованы в электроприводе с ДПТ последовательного возбуждения,
Рассмотрим схему управления ДПТ последовательного возбуждения, показанную на рис. 3.85 Эта схема обеспечивает пуск ДПТ в две ступени по принципу времени и реверс или торможение противовключением по принципу ЭДС. Схема включает в себя пять однополюсных контакторов КМ, КМ1, КМ2, КМЗ, КМ4; два контактора ускорения КМ5 и КМ6, контактор противовключения КМ7; реле противовключения KVI и KV 2 ; реле времени КТ1 и КТ2; выключатели QF 1 и QF 2.
Органом управления в схеме является командоконтроллер SA , имеющий три положения: нулевое, «Вперед» и «Назад». Защиту электропривода обеспечивают максимальные реле КА1, КА2, реле напряжения KV и предохранители FA . Реле противовключения KVI и KV 2 настраиваются таким же образом, что и в схеме рис 3 45, а.
Пуск ДПТ, например, в условном направлении «Вперед» осуществляется переводом командоконтроллера SA в положение «Вперед» Если защита находится в исходном положении, то это приведет к срабатыванию аппаратов КМ, КМ1, КМ2 и подключению ДПТ к сети Возникшее за счет пускового тока падение напряжения на резисторах R п и R д1 вызовет включение реле КТ1 и КТ2, которые разомкнут свои контакты в цепи аппаратов КМ5 и КМ6.
Одновременно с этим сработает реле KVI и своим контактом подаст питание на контактор КМ7. Последний, сработав, закоротит ступень противовключения R п и одновременно катушку реле КТ1, которое, потеряв питание, начнет отсчет выдержки времени. Далее в порядке, рассмотренном выше для аналогичных схем, в функции времени произойдет последовательное закорачивание ступеней пускового резистора R д1 и R д2.
Для реверса командоконтроллер SA переставляется в положение «Назад». При его переходе в это положение отключаются аппараты КМ1, КМ2, КМ7, КМ5, КМ6, вводя в цепь якоря резисторы R п, R д1, R д2 и подготавливая тем самым ДПТ к реверсу или торможению

При последующем включении аппаратов КМ, КМ2, КМ4 изменяется полярность напряжения на якоре ДПТ, и он переходит в режим торможения противовключением. В соответствии со своей настройкой реле KV 2, несмотря на замыкание контакта КМ3 в своей цепи питания, не срабатывает, вследствие чего контакторы КМ7, КМ5 и КМ6 лишены питания и торможение происходит при полностью введенных в цепь якоря резисторах R п + R д1 + R д2 .
По мере снижения скорости растет напряжение на катушке реле К V 2 (см рис 346, б), и при скорости, близкой к нулю, произойдет его срабатывание. Если при этом контроллер остается в положении «Назад», то начинается процесс разбега ДПТ в этом направлении с рассмотренным выше порядком работы схемы.
Если при достижении нулевой скорости переместить контроллер в среднее положение, то ДПТ будет отключен от сети и схема вернется в исходное положение.
В общем случае точный анализ переходных процессов в электроприводе с ДПТ последовательного возбуждения и получение зависимостей изменения координат во времени являются сложными задачами. Это определяется тем, что дифференциальные уравнения для якорной цепи двигателя и механической части привода являются нелинейными из-за наличия в них произведения двух переменных – тока и магнитного потока для момента и скорости и потока для ЭДС. Дополнительное усложнение исследования связано с нелинейной зависимостью магнитного потока от тока, выражаемой кривой намагничивания, а также нелинейностью характеристик ДПТ. В связи с этим точное исследование Переходных процессов в электроприводе возможно только с помощью вычислительных машин. В практических инженерных расчетах, как правило, пользуются различными приближенными способами получения кривых переходного процесса
3.21. СХЕМА ВКЛЮЧЕНИЯ И ХАРАКТЕРИСТИКИ ДПТ СМЕШАННОГО ВОЗБУЖДЕНИЯ
Основная схема включения ДПТ смешанного возбуждения приведена на рис 3.86, а. Двигатель имеет две обмотки возбуждения – последовательную ОВП, включенную последовательно с якорем, и независимую ОВН. Магнитный поток ДПТ вследствие этого представляет собой сумму двух составляющих – потока Фо, в,н, создаваемого ОВН, и потока Фо, в,п, создаваемого ОВП.
Зависимость обеих составляющих и суммарного потока ДПТ Ф в функции тока показана на рис 3.86, б соответственно в виде штриховых линий 1 и 2 и сплошной линии 3. Важно отметить, что при токе якоря, стремящемся к значению – I 1, магнитный поток Ф стремится к нулю, т. е. ДПТ размагничивается.
Электромеханическая и механическая характеристики ДПТ смешанного возбуждения выражаются соответственно формулами (3.163) и (3.164), в которых магнитный поток Ф также есть функция тока.
Для получения участков характеристик при w > w 0 (второй квадрант) проведем следующий дополнительный анализ.
1 При I ® — I 1 (см рис 3.86, б) магнитный поток Ф ® и согласно (3.163) w ® ¥ . Таким образом, вертикальная линия, соответствующая значению тока I =- I 1 , является асимптотой электромеханической характеристики, вид которой показан на рис 3.87, а.
2 Механическую характеристику ДПТ смешанного возбуждения во втором квадранте можно получить из рассмотрения формулы электромагнитного момента ДПТ постоянного тока (3.3) Из нее следует, что когда I ® — I 1 Ф ® и w ® ¥ , момент ДПТ стремится к нулю. Другими словами, ось скорости является асимптотой механической характеристики Так как при w = w 0 М=0, то на интервале скорости w 0 w ¥ момент принимает экстремальное значение Мтах, а механическая характеристика имеет вид кривой, показанной на рис. 3.87, б.
Двигатель смешанного возбуждения, имея две обмотки возбуждения, сочетает в себе свойства как ДПТ независимого возбуждения, так и ДПТ последовательного возбуждения.
Двигатель смешанного возбуждения может работать во всех возможных режимах, а именно двигателем, генератором параллельно, последовательно и независимо от сети, а также в режимах холостого хода и короткого замыкания.

Регулирование координат ДПТ смешанного возбуждения может осуществляться всеми характерными для ДПТ способами, связанными с изменением магнитного потока, напряжения и сопротивления резистора в цепи якоря.
Управление ДПТ смешанного возбуждения осуществляется с помощью схем, рассмотренных применительно к ДПТ независимого и последовательного возбуждения.
Отметим, что из-за относительно невысоких технико-экономических показателей ДПТ смешанного возбуждения (высокая стоимость, повышенные масса, габариты и расход материалов) электропривод с ДПТ смешанного возбуждения применяется сравнительно редко.