Частотный преобразователь — виды, принцип действия, схемы подключения
 Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ее стандартная величина в 50 герц подразумевает совершение пятидесяти периодов колебаний в течение одной секунды. За одну минуту их число возрастает в 60 раз и составляет 50х60=3000 оборотов. Такое же число раз проворачивается ротор под воздействием приложенного электромагнитного поля.
Если изменять величину частоты сети, приложенной к статору, то можно регулировать скорость вращения ротора и подключенного к нему привода. Этот принцип заложен в основу управления электродвигателями.
Виды частотных преобразователей
По конструкции частотные преобразователи бывают:
1. индукционного типа;
Асинхронные электродвигатели, выполненные по схеме с фазным ротором и запущенные в режим генератора, являются представителями первого вида. Они при работе обладают низким КПД и отмечаются маленькой эффективностью. Поэтому они не нашли широкого применения в производстве и используются крайне редко.
Способ электронного преобразования частоты позволяет плавно регулировать обороты как асинхронных, так и синхронных машин. При этом может быть реализован один из двух принципов управления:
1. по заранее заданной характеристике зависимости скорости вращения от частоты (V/f);
2. метод векторного управления.
Первый способ является наиболее простым и менее совершенным, а второй используется для точного регулирования скоростей вращения ответственного промышленного оборудования.
Особенности векторного управления частотным преобразованием
Отличием этого способа является взаимодействие, влияние устройства управления преобразователя на «пространственный вектор» магнитного потока, вращающийся с частотой поля ротора.
Алгоритмы для работы преобразователей по этому принципу создаются двумя способами:
1. бессенсорного управления;
Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции (ШИМ) инвертора для заранее подготовленных алгоритмов. При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
Этим способом пользуются при управлении несколькими электродвигателями, подключенными параллельно к преобразователю частоты. Потокорегулирование подразумевает контроль рабочих токов внутри двигателя с разложением их на активную и реактивную составляющие и внесение корректив в работу преобразователя для выставления амплитуды, частоты и угла для векторов выходного напряжения.
Это позволяет повысить точность работы двигателя и увеличить границы его регулирования. Применение потокорегулирования расширяет возможности приводов, работающих на малых оборотах с большими динамическими нагрузками, такими как подъемные крановые устройства или намоточные промышленные станки.
Использование векторной технологии позволяет применять динамическую регулировку вращающихся моментов к трехфазным асинхронным двигателям.
Принципиальную упрощенную электрическую схему асинхронного двигателя можно представить следующим видом.
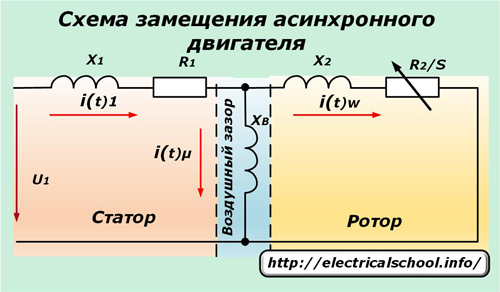
На обмотки статора, обладающие активным R1 и индуктивным X1 сопротивлениями, приложено напряжение u1. Оно, преодолевая сопротивление воздушного зазора Хв, трансформируется в обмотку ротора, вызывая в ней ток, который преодолевает ее сопротивление.
Векторная диаграмма схемы замещения
Ее построение помогает понять происходящие процессы внутри асинхронного двигателя.
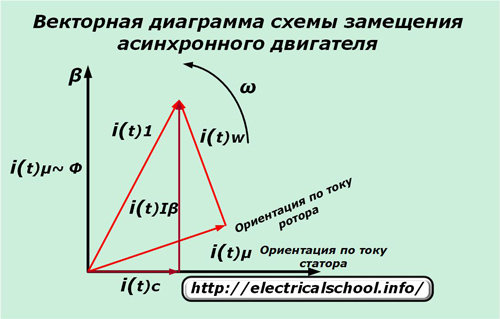
Энергия тока статора разделяется на две части:
iµ — потокообразующую долю;
iw — моментообразующую составляющую.
При этом ротор обладает активным сопротивлением R2/s, зависящим от скольжения.
Для бессенсорного управления измеряются:
По их значениям рассчитывают:
iµ — потокообразующую составляющую тока;
iw — моментообразующую величину.
В алгоритм расчета уже заложили электронную эквивалентную схему асинхронного двигателя с регуляторами тока, в которой учтены условия насыщения электромагнитного поля и потерь магнитной энергии в стали.
Обе этих составляющих векторов тока, отличающиеся по углу и амплитуде, вращаются совместно с системой координат ротора и пересчитываются в стационарную систему ориентации по статору.
По этому принципу подстраиваются параметры частотного преобразователя под нагрузку асинхронного двигателя.
Принцип работы частотного преобразователя
В основу этого устройства, которое еще называют инвертором, заложено двойное изменение формы сигнала питающей электрической сети.
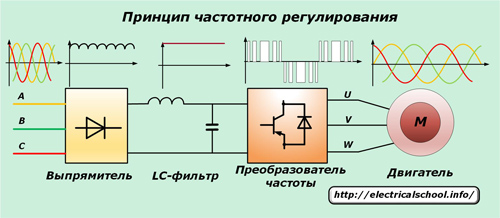
Вначале промышленное напряжение подается на силовой выпрямительный блок с мощными диодами, которые убирают синусоидальные гармоники, но оставляют пульсации сигнала. Для их ликвидации предусмотрена батарея конденсаторов с индуктивностью (LC-фильтр), обеспечивающая стабильную, сглаженную форму выпрямленному напряжению.
Затем сигнал поступает на вход преобразователя частоты, который представляет собой мостовую трехфазную схему из шести силовых транзисторов серии IGBT или MOSFET с диодами защиты от пробоя напряжений обратной полярности. Используемые ранее для этих целей тиристоры не обладают достаточным быстродействием и работают с большими помехами.
Для включения режима «торможения» двигателя в схему может быть установлен управляемый транзистор с мощным резистором, рассеивающим энергию. Такой прием позволяет убирать генерируемое двигателем напряжение для защиты конденсаторов фильтра от перезарядки и выхода из строя.
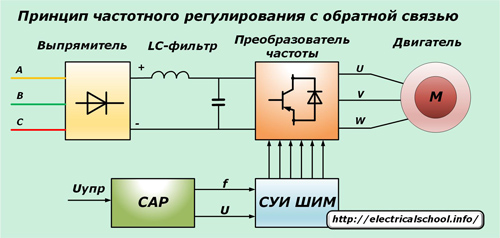
Способ векторного управления частотой преобразователя позволяет создавать схемы, осуществляющие автоматическое регулирование сигнала системами САР. Для этого используется система управления:
2. ШИМ (широтного импульсного моделирования).
Метод амплитудного регулирования основан на изменении входного напряжения, а ШИМ — алгоритма переключений силовых транзисторов при неизменном напряжении входа.
При ШИМ регулировании создается период модуляции сигнала, когда обмотка статора подключается по строгой очередности к положительным и отрицательным выводам выпрямителя.
Поскольку частота такта генератора довольно высокая, то в обмотке электродвигателя, обладающего индуктивным сопротивлением, происходит их сглаживание до синусоиды нормального вида.
![]()
Способы ШИМ управления позволяют максимально исключить потери энергии и обеспечивают высокий КПД преобразования за счет одновременного управления частотой и амплитудой. Они стали доступны благодаря развитию технологий управления силовыми запираемыми тиристорами серии GTO или биполярных марок транзисторов IGBT, обладающих изолированным затвором.
Принципы их включения для управления трехфазным двигателем показаны на картинке.
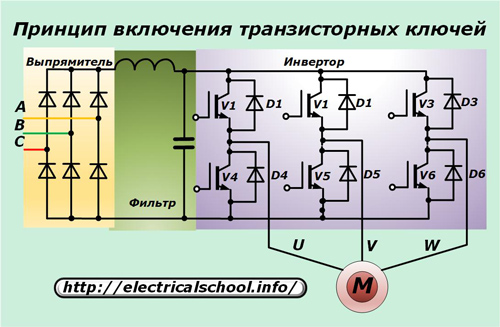
Каждый из шести IGBT-транзисторов подключается по встречно-параллельной схеме к своему диоду обратного тока. При этом через силовую цепь каждого транзистора проходит активный ток асинхронного двигателя, а его реактивная составляющая направляется через диоды.
Для ликвидации влияния внешних электрических помех на работу инвертора и двигателя в конструкцию схемы преобразователя частоты может включаться помехозащитный фильтр, ликвидирующий:
наводимые работающим оборудованием электрические разряды.
Их возникновение сигнализирует контроллер, а для уменьшения воздействия используется экранированная проводка между двигателем и выходными клеммами инвертора.
С целью улучшения точности работы асинхронных двигателей в схему управления частотных преобразователей включают:
ввода связи с расширенными возможностями интерфейса;
информационный Led-дисплей, отображающий основные выходные параметры;
тормозной прерыватель и встроенный ЭМС фильтр;
систему охлаждения схемы, основанную на обдуве вентиляторами повышенного ресурса;
функцию прогрева двигателя посредством постоянного тока и некоторые другие возможности.
Эксплуатационные схемы подключения
Частотные преобразователи создаются для работы с однофазными или трехфазными сетями. Однако, если есть промышленные источники постоянного тока с напряжением 220 вольт, то от них тоже можно запитывать инверторы.

Трехфазные модели рассчитываются на напряжение сети 380 вольт и выдают его на электродвигатель. Однофазные же инверторы питаются от 220 вольт и на выходе выдают три разнесенных по времени фазы.
Схема подключения частотного преобразователя к двигателю может быть выполнена по схемам:
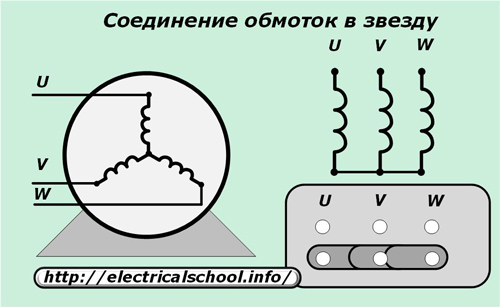
Обмотки двигателя собираются в «звезду» для преобразователя, запитанного от трехфазной сети 380 вольт.
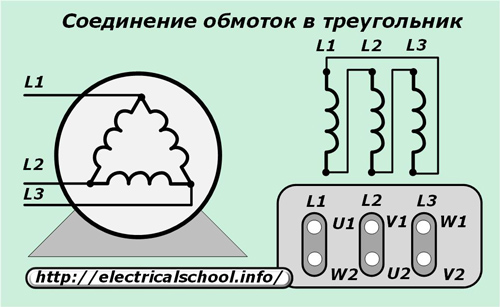
По схеме «треугольник» собирают обмотки двигателя, когда питающий его преобразователь подключен к однофазной сети 220 вольт.
Выбирая способ подключения электрического двигателя к преобразователю частоты надо обращать внимание на соотношение мощностей, которые может создать работающий двигатель на всех режимах, включая медленный, нагруженный запуск, с возможностями инвертора.
Нельзя постоянно перегружать частотный преобразователь, а небольшой запас его выходной мощности обеспечит ему длительную и безаварийную работу.
Как подключить частотный преобразователь, принцип управления электродвигателем через частотник

Чтобы подключить частотник к асинхронному трёхфазному двигателю, следует хотя бы на минимальном уровне разбираться в схеме его подключения и принципах работы. Нижеприведённая информация позволяет изучить данную тему.
Принцип управления электродвигателем
Ротор электрического двигателя функционирует благодаря вращению электромагнитных полей под статорной обмоткой. Скорость движения ротора находится в зависимости от промышленной частоты питающей сети.
Стандартное её значение составляет 50Гц и вызывает соответственно пятьдесят колебательных периодов за секунду. На протяжении минуты количество оборотов увеличивается до трёх тысяч. Настолько же часто осуществляются обороты ротора подвергаемого воздействию электромагнитных полей.
При изменении уровня прилагаемой к статору частоты, появляется возможность управления вращательной скоростью ротора и соединяемого с ним привода. Именно благодаря этому принципу осуществляется управление электродвигателем.
Классификация частотных преобразователей
По своим конструктивным различиям модели частотного преобразователя делятся на:
Индукционные.
Сюда относятся электрические двигатели имеющие асинхронный принцип работы. Данные устройства не отличаются высоким уровнем КПД и значительной эффективностью. Ввиду этих качеств они не имеют большой доли в общем числе преобразователей и редко применяются.
Электронные.
Пригодны для осуществления плавного управления оборотами в машинах асинхронного и синхронного типа. Управление в электронных моделях может производиться двумя способами:
Скалярный (согласно предварительно введённым параметрам взаимозависимости вращательной V и частоты).
Наиболее простой подход к управлению, довольно неточный.
Векторный.
Отличительной характеристикой является точность управления.
Векторное управление преобразователем частот
Принцип работы векторного управления заключается в следующем: при нём оказывается воздействие на магнитный поток, изменяя направление его “пространственного вектора” и регулирующий роторную частоту поля.
Создать рабочий алгоритм частотного преобразователя с векторным управлением можно при помощи двух способов:
Бессенсорное управление.
Осуществляется за счёт назначения зависимостей чередования между последовательностями широтно-импульсных модуляций инвертора для предварительно составленных алгоритмов. Регуляция размера амплитуды и выходной частоты, которую имеет напряжение, осуществляется в соответствии со скольжением и нагрузочным током, но обратная связь от роторной вращательной скорости не учитывается.
Потокорегулирование.
Рабочие токи устройства регулируются. При этом они раскладываются на активный и реактивный компонент. Это облегчает возможность внесения корректирующих изменений в рабочий процесс (изменение амплитуд, частот, векторных углов, которые имеет напряжение на выходе).
Способствует повышению точности и диапазона регуляции вращений асинхронного двигателя. Весьма актуален такой подход для устройства с малыми оборотами и высоким уровнем двигательных нагрузок.
В целом, схема векторного управления более прочих подходит для динамической регулировки вращающегося момента трёхфазного асинхронного двигателя.

Подключение транзисторных ключей
Все шесть IGBT-транзисторов соединяются с соответствующими диодами обратного тока с соблюдением встречно-параллельной схемы. После по цепи силового подключения, образуемой каждым транзистором происходит прохождение активного тока асинхронного двигателя, с последующим направлением его реактивной составляющей через диоды. С целью обеспечения безопасности инвертора и асинхронного двигателя от воздействия сторонних электрических помех конструкция преобразователя частоты может включать в себя помехозащитные фильтры. Если промышленные источники постоянного тока имеют рабочее напряжение в 220 В, то они также могут использоваться для запитывания инверторов.
Как подключить частотник к асинхронному двигателю?
Используемый для управления частотой напряжения преобразователь зачастую используется для энергоснабжения трёхфазных двигателей. С помощью преобразователя частоты также возможно обеспечить присоединение такого устройства к однофазной сети, предотвратив снижение его рабочей мощности. Этим они значимо выигрывают у конденсаторов, которые при подключении не могут сохранить исходный уровень мощности. Подробней про применение частотника для трехфазника- смотрите здесь.
При подключении частотного преобразователя следует предварительно разместить автоматический выключатель, функционирующий от тока сети по значению равного номинальному (или наиболее близкого к таковому) уровню потребления тока в двигателе. Если используется частотник трёхфазного типа, то соответственно следует воспользоваться трёхфазным автоматом с общим рычагом. Такой вариант обеспечивает быстрое обесточивание всех фаз сразу при замыкании на одной из них.
Ток срабатывания по своим характеристикам должен совпадать с однофазным током электрического двигателя.
В случае же, если для частотного преобразователя свойственно однофазное питание, то следует применить одинарный автомат, который подходит для работы с утроенным однофазным током.
Однако, при любых обстоятельствах установку частотного преобразователя нельзя осуществлять через включение автомата в месте разрыва нулевых или заземляющих проводов. В таких условиях подразумевается только прямое включение автомата.

Дальнейшую настройку преобразователя частоты осуществляют через соединение с контактами электрического двигателя. Используются при этом фазные провода. Но предварительно производится соединение обмоток электрического двигателя по схеме “звезда” или “треугольник”.
Работа по той или иной схеме базируется на том, каков тип преобразователя частоты и характер производимого им напряжения.
По стандарту корпус каждого двигателя имеет отметку с двумя значениями, которым может равняться напряжение. Если частотник продуцирует напряжение соответствующее нижней границы, то соединение осуществляется по типу “треугольник”. В остальных случаях для использования принцип “звезды”.
Месторасположение управляющего пульта, обязательно прилагающегося при покупке частотного преобразователя, следует подбирать тщательно, чтобы обеспечить наибольшее удобство пользования.
Подключения пульта управления осуществляется по схеме обозначенной в прилагаемой к преобразователю инструкции. После рукоятка фиксируется на нулевом уровне, и автомат включается. В этот момент должно наблюдаться свечение светового индикатора.
Для использования частотного преобразователя, следует надавить кнопку “RUN” (она уже запрограммирована надлежащим образом). Далее делается лёгкий поворот рукоятки, провоцирующий старт постепенного вращения электрического двигателя. Если вращение осуществляется в направлении, противоположном необходимому, то следует нажать реверс. После при помощи рукоятки настраивается требуемая частота вращения устройства. При этом следует учитывать, что на корпусе пульта управления зачастую прописаны не уровни частоты вращения двигателя, выражаемые в оборотах в минуту, а частоты, которую имеет питающее напряжение, выражаемое в герцах.
Чтобы ограничить пусковой ток и снизить пусковой момент в момент пуска асинхронного двигателя с уровнем мощности больше 5000Вт, используется подключение типа “звезда-треугольник”. До достижения номинала скорости задействуется схема подключения частотного преобразователя “звезда”, а после питание осуществляется по схеме “треугольник”. В момент переключения уровень пускового тока уменьшается в три раза относительно прямого пуска. При начале работы по второй схеме до момента разгона двигателей ток возрастёт до уровня прямого пуска. Такой варианты наиболее актуален для, имеющих большую маховую массу, позволяя после разгона сбросить нагрузку.
Логично, что использование такой схемы возможно только с двигателями, рассчитанными на подключения обоих типов.
Проведение работы по схеме “звезда-треугольник” всегда чревато резкими скачками уровня тока в противовес плавному нарастанию в условиях прямого пуска. В момент смены соединения скорость резко снижается и увеличить её можно только увеличив силу тока.