Схема динамического торможения асинхронного двигателя с короткозамкнутым ротором

Динамическое торможение асинхронного двигателя выполняется отключением двигателя от трехфазной сети и подачи постоянного напряжения на любые две обмотки статора (AB, BC или AC). Магнитный поток в обмотках статора, взаимодействует с током ротора, создавая тормозной момент, что приводит к полному останову двигателя.
Пуск асинхронного двигателя с кз ротором
Подача напряжения на управляющую и силовую цепь осуществляется автоматическим выключателем QF. Нажатием кнопкой SB1 “Пуск” запитывается магнитный пускатель КМ1, который срабатывает и замыкает свои контакты:
- КМ1.1 в цепи статора — двигатель запускается
- КМ1.2 — шунтирует кнопку “Пуск”
- КМ1.3 -подает напряжения на реле времени КТ
и размыкает нормально замкнутый контакт КМ1.4 который не даст сработать магнитному пускателю КМ2, после срабатывания реле времени КТ.
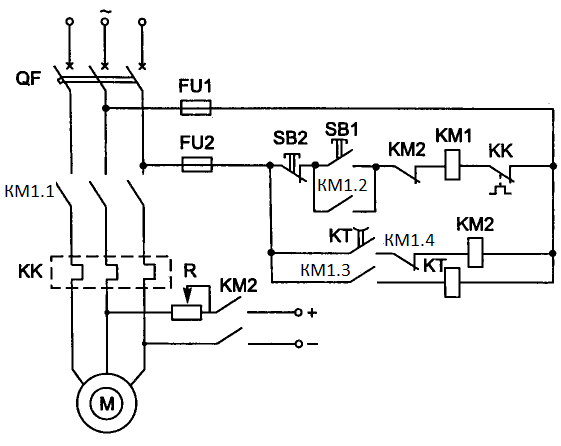 Рисунок.1. Схема управления асинхронным двигателем с короткозамкнутым ротором с динамическим торможением в функции времени
Рисунок.1. Схема управления асинхронным двигателем с короткозамкнутым ротором с динамическим торможением в функции времени
Осатнов асинхронного двигателя с кз ротором
При нажатии кнопки SB2 “Стоп” катушка пускателя КМ1 обесточивается и пускатель одновременно возвращает свои контакты в исходное положение:
- Размыкает КМ1.1 (прекращает подачу электрического тока на обмотку статора) – асинхронный двигатель обесточен.
- Размыкает КМ1.2 — разблокирует кнопку пуска
- Размыкает КМ1.3 — обесточивает реле времени КТ
- Замыкает нормально замкнутый контакт КМ1.4, что приводит подачи напряжения на контактор КМ2, так как контакты реле времени КТ размыкаются не сразу, а через заданный временной интервал. При срабатывании КМ2 на статор асинхронного двигателя подаётся постоянное напряжение, двигатель переходит в режим динамического торможения.
В схеме применено реле времени с выдержкой времени при размыкании. Длительность подачи постоянного напряжения на статор будет равна выдержки реле КТ. После истечении выдержки скорость вала двигателя близка к нулю, контакты КТ размыкаются и обесточивают КМ2 и двигатель отключается от сети.
Для регулировки интенсивности торможения в цепь статора включен регулировочный резистор R. В схеме применена блокировка с помощью размыкающих контактов КМ1.4 и КМ2 для невозможности включения статора двигателя одновременно в сеть постоянного и трехфазного тока.
Схемы торможения асинхронных двигателей
 После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбегом . Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
В тех же случаях, когда продолжительность свободного выбега значительна и оказывает влияние на производительность электродвигателя (работа с частыми пусками), для сокращения времени остановки применяют искусственный метод преобразования кинетической энергии, запасенной в движущейся системе, называемый торможением .
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.
 При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя либо отдается в сеть, либо преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
Наиболее совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя незначительны
Схемы динамического торможения асинхронных двигателей
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные н а рис. 1, из которых схема р и с. 1, а применяется пр и наличии сети постоянного тока, а схема рис. 1, б — при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
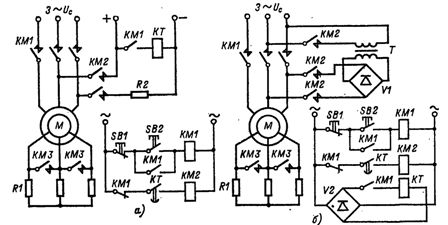
Рис. 1 Схемы управления динамическим торможением асинхронных двигателей с фазным ротором с заданием времени при наличии и отсутствии сети постоянного тока
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме рис. 1, а дополнительным резистором R2, а в схеме рис. 1. б соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть выбран как на постоянном, так и на переменном токе в зависимости от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные н а рис. 1 схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведенная на р и с. 1 , б.
Схемы торможения противовключением асинхронных двигателей
При управлении моментом при торможении противовключением асинхронного двигателя с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис. 2.
В качестве реле противовключения используется реле контроля скорости SR, укрепляемое на двигателе. Реле настраивается на напряжение отпадания, соответствующее скорости, близкой к нулю и равной (0,1 — 0,2) ω уст.
Схема используется для остановки двигателя с торможением противовключением в реверсивной (рис. 2, а) в в нереверсивной (рис. 2, б) схемах. Команда SR используется для отключения контакторов КМ2 или КМЗ и КМ4, отключающих обмотку статора от напряжения сети при скорости двигателя, близкой к нулю. При реверсировании двигателя команды SR не используются.
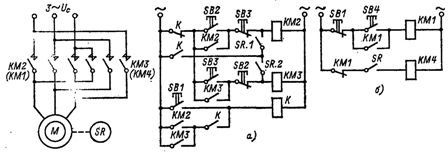
Рис. 2 Узлы схемы управления торможения противовключением асинхронного двигателя с коооткозамкнутым ротором с контролем скорости при остановке в реверсивной и нереверсивной схемах
Узел управления асинхронным двигателем с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящей из R1 и R2, приведен на рис. 3. Управляющее реле противовключения KV, в качестве которого применяется, например, реле напряжения постоянного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Часто для настройки реле KV используется дополнительный резистор R3. Схема в основном применяется при реверсировании АД со схемой управления, приведенной на рис. 3, а, но может использоваться и при остановке в нереверсивной схеме управления, приведенной на рис. 3, б.
При пуске двигателя реле противовключения КV не вклгочатся и ступень противовключения резистора ротора R1 выводится сразу после подачи управляющей команды на пуск.
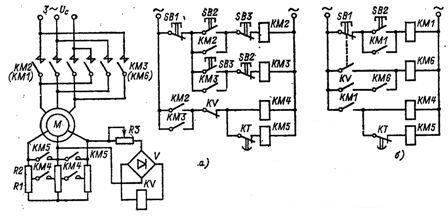
Реле KV отключает контакторы КМ4 и КМ5 и тем самым вводит полное сопротивление Rl + R 2 ротор двигателя.
В конце процесса торможения при скорости асинхронного двигателя, близкой к нулю и составляющей примерно 10 — 20 % установившейся начальной скорости ω пер = (0,1 — 0,2) ωуст , реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 с помощью контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме или команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
Схемы механического торможения асинхронных двигателей
При остановке асинхронных двигателей, а также для удержания механизма передвижения или подъема, например в крановых промышленных установках, в неподвижном состоянии при отключенном двигателе применяется механическое торможение. Оно обеспечивается электромагнитными колодочными или другими тормозами с трехфазным электромагнитом переменного тока, который при включении растормаживает тормоз. Электромагнит тормоза YB включается и отключается вместе с двигателем (рис 4, а).
Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если нужно отключать тормоз не одновременно с двигателем, а с некоторой задержкой по времени, например после окончания электрического торможения (рис. 4, б)
Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при отключении линейного контактора КМ1 (рис. 4, в).
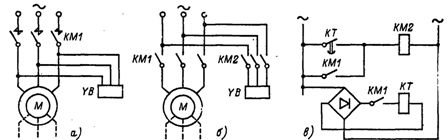
Рис. 4. Узлы схем, осуществляющих механическое торможение асинхронных двигателей
В асинхронных электроприводах применяются также электромагнитные тормоза постоянного тока при управлении электродвигателем от сети постоянного тока.
Схемы конденсаторного торможения асинхронных двигателей
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможение с самовозбуждением. Оно обеспечивается конденсаторами C1 — С3, подключенными к обмотке статора. Включаются конденсаторы по схеме звезды (рис. 5, а) или треугольника (рис. 5, б).
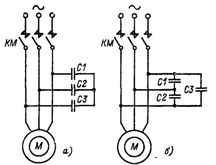
Рис. 5. Узлы схем, осуществляющих конденсаторное торможение асинхронных двигателей
Динамическое торможение двигателя
 Динамическое торможение применяют для быстрой и точной остановки двигателя. Схема динамического торможения двигателя с описание работы находится здесь. В этой же статье мы рассмотрим физические процессы протекающие при динамическом торможении асинхронных двигателей с короткозамкнутым и фазным ротором.
Динамическое торможение применяют для быстрой и точной остановки двигателя. Схема динамического торможения двигателя с описание работы находится здесь. В этой же статье мы рассмотрим физические процессы протекающие при динамическом торможении асинхронных двигателей с короткозамкнутым и фазным ротором.
Динамически торможение вращающегося по инерции инерции короткозамкнутого ротора двигателя возникает после отключения обмотки статора от питающей сети переменного тока. Двигатель останавливается после присоединения обмотки к источнику постоянного тока.
Постоянные токи в фазах обмотки статора обуславливают соответствующую ЭДС, возбуждающую в двигателе неподвижное магнитное поле. Оно наводит в фазах обмотки вращающегося ротора переменные ЭДС и токи убывающей частоты. Следовательно, асинхронный двигатель переходит в режим генератора переменного тока с неподвижными магнитными полюсами. В этом режиме двигатель преобразует кинетическую энергию движущихся и вращающихся по инерции звеньев производственного механизма в электрическую, переходящую в тепловую энергию в цепи обмотки ротора.
Взаимодействие магнитного поля, возбужденного магнитодвижущей силы обмотки статора, с током в фазах обмотки ротора обуславливает возникновение тормозного момента, под действием которого ротор двигателя останавливается.
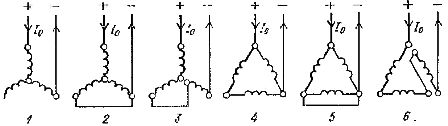
Рис. 1. Схемы включения фаз обмотки статора трехфазного асинхронного двигателя на постоянное напряжение при динамическом торможении
Величина тормозного момента зависит от значения магнитодвижущей силы обмотки статора, величины активного сопротивления регулируемых резисторов цепи обмотки ротора и его скорости. Для получения удовлетворительного торможении величина постоянного тока должна быть в 4 — 5 paз больше тока холостого хода асинхронного двигателя.

Механические характеристики асинхронной машины при динамическом торможении проходят через начало координат, так как при скорости, ранней нулю, тормозной момент отсутствует. Величина максимального тормозною момента возрастает с увеличением постоянною тока, но не зависит от величины активных сопротивлений регулируемых резисторов, введенных в цепь обмотки ротора, которые определяют его скорость, при которой момент достигает значения Мт = Ммах G . При заданном тормозном моменте Мт увеличение активных активного сопротивления резисторов Rд приводит к возрастанию скорости ротора.
Динамическое торможение асинхронных двигателей достаточно экономично и осуществимо как при скоростях меньших синхронной скорости, так и при скоростях, превышающих ее (рис. 2).
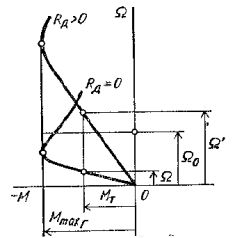
Рис. 2. Механические характеристики трехфазного асинхронного двигателя с фазным ротором при динамическом торможении
Для трехфазных асинхронных двигателей с короткозамкнутым ротором также часто применяют конденсаторное торможение, при котором к зажимам обмотки статора присоединяют симметричную трехфазную батарею конденсаторов, которая после отключения машины от питающей сети и вращающемся по инерции роторе обеспечивает возбуждение в обмотке статора трехфазной симметричной системы напряжений. Вследствие перехода машины на генераторный режим возникает тормозной момент, снижающий скорость ротора двигателя. Подробнее об этом читайте здесь: Конденсаторное торможение асинхронных электродвигателей
Схема торможения двигателя динамическим торможением
Динамическое торможение АД (торможение постоянным током) осуществляется путем подключения к двум любым обмоткам статора источника постоянного тока. При этом с помощью группы контактов К1 асинхронный двигатель сначала отключают от питания трехфазным переменным током, и только после этого, замыкают группу контактов К2 и подают постоянный ток. Величину постоянного тока регулируют сопротивлением r т (рисунок 1).
Рисунок 1 — Схема динамического торможения асинхронного двигателя
Само динамическое торможение асинхронного двигателя сопровождается следующими процессами и изменениями:
При отключении переменного тока, вращающееся магнитное поле перестает существовать. Далее подключают источник постоянного тока, который создает постоянное магнитное поле. Ротор по инерции продолжает крутиться теперь уже в постоянном магнитном поле, в обмотке ротора наводится ЭДС, ее частота прямо пропорциональна скорости вращения вала. Появление тока в обмотке ротора вызвано наличием вышеупомянутой ЭДС. Ток создает магнитный поток, который неподвижнен относительно статора. Взаимодействие результирующего магнитного поля АД и тока ротора создает тормозной момент. При этом асинхронный двигатель становится генератором; преобразовует кинетическую энергию вращающегося вала в электрическую, которая на обмотке ротора рассеивается в виде тепловой энергии. При переходе в режим динамического торможения частота и угловая скорость равны: f =0 w =0. Кривая динамического торможения должна проходить через начало координат и торможение происходит до полной остановки (рисунок 2).
Эффективность динамического торможения зависит от параметров:
— Величина постоянного тока, который протекает по статорной обмотке двигателя (чем больше ток, тем больше тормозной эффект);
— Величина сопротивления, введенного в цепь ротора. Эффективность торможения повышается путем комбинирования динамического торможения и торможения с введением сопротивлений в обмотку ротора (рисунок 2):
Рисунок 2 – Механическая характеристика динамического торможения асинхронного двигателя
Чем больше сопротивление введено в цепь ротора, тем выше эффективность торможения, то есть на кривой а1 изображена самая быстрая остановка двигателя при наибольшем сопротивлении — R1>R2 >R3 .
— Схема соединения обмоток статора .
Величина магнитодвижущей силы ( F ) напрямую связана с понятием эффективность торможения, чем больше значение силы – тем эффективней происходит торможение,
На рисунках, которые изображены ниже, стрелками показаны направления протекания постоянного тока по обмоткам, IW – ампер витки (так как количество витков в обмотках одинаково, то зависит значение только от величины тока). Векторные диаграммы иллюстрируют направления магнитодвижущих сил ( F ), сложив по правилам суммирования векторы, мы получим результирующий вектор, который обозначен жирной стрелкой.
Обмотка статора может быть соединена:
а) Схема соединения обмотки статора в звезду:
б) Схема соединения статорной обмотки в треугольник:
в) Соединение обмотки статора в звезду с закороченными двумя фазами:
г) Подключение звезда с разорванным нулем:
д) Подключение треугольник с закороченными фазами:
Схемы соединения а) и б) имеют наибольшее распространение, потому что не требуют переключения при торможении самих обмоток.
Необходимо подметить, что напряжение ( U ) источника постоянного тока должно быть малой величиной, потому что сопротивление обмотки статора мало. Ток выбирается из условия необходимого начального тормозного момента, обычно выбирают
Преимущества режима динамического торможения:
— Относительная простота осуществления способа;
— Возможность торможения до полной остановки вала ротора;
— Высокая эффективность торможения, особенно при использовании комбинированного метода.
Основным недостатком является необходимость наличия источника постоянного тока.
Расчет величины тормозного сопротивления:
где R T — полное сопротивление цепи источника постоянного тока,
rф.ст — сопротивление фазы статора.
Вышеприведенные формулы являются частным случаем (для понимания отношений величин сопротивления), когда постоянный ток протекает только по двум обмоткам статора, если же ток будет протекать по трем обмоткам, то коэффициент (количество фаз) перед сопротивлением фазы статора нужно соответственно изменить.
Советую вам прочесть статью про торможение противовключением, в которой подробно расписан данный вид остановки двигателя.