Схемы управления двигателями в функции времени
 Этот вид управления применяется тогда, когда все переключения в схеме электродвигателя осуществляют в определенные моменты времени, например при автоматизации процесса пуска электродвигателей без контроля частоты вращения или тока. Длительность интервалов обусловлена и может регулироваться уставками реле времени.
Этот вид управления применяется тогда, когда все переключения в схеме электродвигателя осуществляют в определенные моменты времени, например при автоматизации процесса пуска электродвигателей без контроля частоты вращения или тока. Длительность интервалов обусловлена и может регулироваться уставками реле времени.
Управление в функции времени получило наибольшее распространение в промышленности из-за простоты и надежности серийно выпускаемых электромагнитных и электронных реле времени .
Так, из рис. 1, а и б видно, что замыканием контакта К линейного контактора в цепь якоря включается все сопротивление реостата, равное R1 + R2 + R3, а включение секций пускового сопротивления может происходить через определенные интервалы времени t1, t2 и t3 при определенных частотах вращения двигателя n1, n2, n3 и при снижении пускового тока до заданного значения I2. Интервалы времени подбираются так, чтобы при каждом очередном закорачивании сопротивления ток двигателя не превышал бы допустимого I1.
При разгоне двигателя от n= 0 до n1 ток убывает до I2 в результате роста противоэлектродвижущей силы. Через промежуток времени t1 замыкается контакт К1, шунтирующий сопротивление R1, что вызывает уменьшение сопротивления реостата до R2+R3, новое увеличение тока до I1 и т. д. По окончании пуска двигатель разгоняется до номинальной частоты вращения, пусковой реостат полностью выведен.
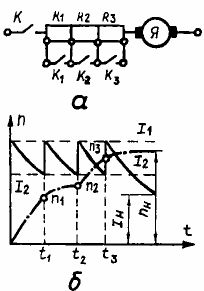
Рис. 1. Схемы управления двигателями в функции времени: а — пускового реостата двигателя постоянного тока, б — пусковая диаграмма
Рассмотрим некоторые схемы управления двигателя в функции времени.
При управлении асинхронным двигателем с фазным ротором в функции времени (рис. 2) выдержка времени, необходимая для закорачивания отдельных ступеней пускового реостата, обеспечивается маятниковыми реле времени, число которых равно числу ступеней. Работа схемы осуществляется следующим образом.
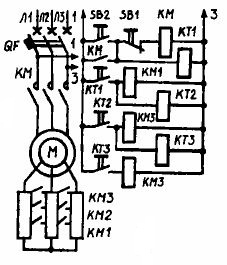
Рис. 2. Схема управления в функции времени асинхронного двигателя с фазным ротором
При нажатии на кнопку SB1 получает электропитание катушка линейного контактора КМ, включающего статор двигателя в сеть. Пусковой реостат при этом введен полностью. Вместе с контактором включается реле времени КТ1, которое через заданный интервал времени замыкает контакт в цепи катушки контактора КМ1.
Контактор срабатывает и замыкает первую секцию пускового реостата ротора. При этом включается реле времени КТ2, которое замыкает с замедлением свои контакты и включает катушку КМ2 и реле времени КТЗ. Контакты контактора КМ2 закорачивают вторую ступень КМ2 пускового реостата. Далее с замедлением времени срабатывает контакт реле КТЗ, включающий катушку КМЗ, которая закорачивает последнюю ступень пускового реостата КМЗ, и двигатель продолжает работать в дальнейшем как с короткозамкнутым ротором.
Останов двигателя производят кнопкой SB, а при перегрузках двигатель отключается расцепителями автоматического вводного выключателя QF. При этом отключается линейный контактор, его блок-контакт КМ и все контакторы ускорения и реле времени без выдержки времени. Схема готова к следующему пуску.
Для пуска вхолостую асинхронного двигателя повышенной мощности с переключением обмотки статора со звезды на треугольник можно использовать схему рис. 3. Переключение в этой схеме выполняется автоматически в функции времени. Нажатием кнопки SB2 обмотку статора включают в сеть контактором КМ. Одновременно подключаются к сети реле времени КТ и катушка KY, соединяющего обмотку статора звездой при помощи трех замыкающих контактов в силовой цепи.
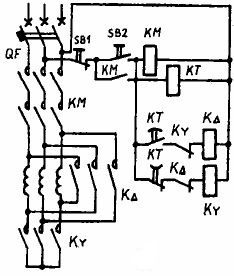
Рис. 3. Схема управления в функции времени асинхронного двигателя переключением со Y на Δ
Двигатель включается и разгоняется при пониженном напряжении. Через заданный промежуток времени реле КТ выключает контактор KY и включает катушку контактора КΔ соединяющего обмотку статора треугольником. Так как в цепи катушки КΔ находится блок-контакт KY, включение контактора КΔ не может произойти раньше выключения контактора KMY.
Ступенчатый пуск многоскоростных асинхронных двигателей является более экономичным и выполняется в функции времени. Рассмотрим пример ступенчатого пуска двухскоростного однообмоточного двигателя (рис. 4). Обмотка статора переключается с треугольника на двойную звезду с удвоением частоты вращения.
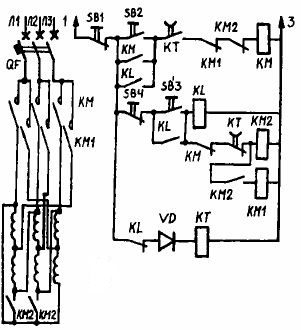
Рис. 4. Схема управления в функции времени ступенчатого пуска асинхронного двигателя
Контактором КМ двигатель включается на первую ступень частоты вращения, а контакторами КМ2 и КМ1 на вторую. Для включения двигателя на первую частоту вращения нажатием кнопки SB2 включается катушка контактора КМ и его силовые контакты КМ в главной цепи. Обмотка статора, соединенная треугольником, включается в сеть. Катушка реле времени КТ находится под напряжением, а ее замыкающий контакт (в цепи катушки КМ) замкнут.
 Ступенчатый пуск двигателя на вторую частоту вращения выполняется при помощи промежуточного реле К, цепь которого замыкается пусковой кнопкой SB3. Замыкающие контакты К шунтируют обе пусковые кнопки, а размыкающий контакт К отключает реле времени КТ. Замыкающий контакт КТ в цепи катушки КМ отключается с замедлением при возврате, поэтому катушка КМ в первый период пуска оказывается замкнутой, а двигатель включается на первую частоту вращения.
Ступенчатый пуск двигателя на вторую частоту вращения выполняется при помощи промежуточного реле К, цепь которого замыкается пусковой кнопкой SB3. Замыкающие контакты К шунтируют обе пусковые кнопки, а размыкающий контакт К отключает реле времени КТ. Замыкающий контакт КТ в цепи катушки КМ отключается с замедлением при возврате, поэтому катушка КМ в первый период пуска оказывается замкнутой, а двигатель включается на первую частоту вращения.
Блок-контакт КМ в цепи катушек КМ2 и КМ1 размыкается. Эти катушки отключены также размыкающим контактом КТ, который срабатывает с замедлением при возврате. Через заданный промежуток времени замыкающий контакт КТ отключит катушку КМ, а его размыкающий контакт включит катушки контакторов второй частоты вращения КМ1 и КМ2. Их главные контакты в силовой цепи переключат обмотку статора на двойную звезду и включат ее в сеть.
Следовательно, двигатель сначала разгоняется до первой частоты вращения, а затем автоматически переключается на вторую частоту вращения. Отметим, что предварительное соединение обмотки статора на двойную звезду и последующее включение ее в сеть выполняется сначала включением двух замыкающих силовых контактов КМ2, а затем трех замыкающих главных контактов КМ1. Такая последовательность включения достигается тем, что катушка КМ1 включается на напряжение через замыкающий блок-контакт КМ2. Останов двигателя выполняется нажатием кнопки «Стоп», обозначенной на схеме буквой SB1.
На рис. 5 изображена схема автоматического пуска двигателя постоянного тока параллельного возбуждения в функции времени. Включением автоматического выключателя QF двигатель подготавливается к пуску. Ток течет по цепи, состоящей из катушки реле времени КТ1, якоря двигателя М и двух ступеней пускового реостата R1 + R2.
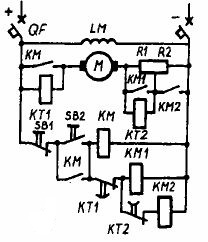
Рис. 5. Схема управления в функции времени двигателя постоянного тока параллельного возбуждения
Вследствие большого сопротивления катушки реле КТ1 ток в этой цепи весьма мал и никакого действия на двигатель не оказывает, но само реле срабатывает и его размыкающий контакт в цепи контактора КМ1 размыкается. В обмотку второго реле времени КТ2, включенную параллельно сопротивлению R1, ответвляется столь малый ток, что включиться оно не может. Обмотка возбуждения LM двигателя также оказывается включенной.
Пуск двигателя выполняется нажатием кнопки SB2. Включаются при этом контактор КМ и его контакт в цепи якоря двигателя. Большой пусковой ток ограничивается двумя ступенями реостата R1 и R2. Часть этого тока ответвляется в катушку реле КТ2, и оно, срабатывая, размыкает свой контакт КТ2 в цепи контактора КМ2. Одновременно с замыканием цепи якоря М рабочий контакт контактора КМ закорачивает катушку реле КТ1.
После установленного промежутка времени при возврате реле КТ1 замкнет свой контакт КТ1 в цепи контактора КМ1. Этот контактор своим рабочим контактом KM1 закоротит первую ступень R1 пускового реостата и обмотку реле времени КТ2. С замедлением при возврате его рабочие контакты КТ2 включат контактор КМ2, который своими рабочими контактами КМ2 закоротит вторую ступень R2 пускового реостата. На этом пуск двигателя заканчивается.
При нажатии на кнопку SB1 контактор КМ обесточится и отключит свой главный контакт в цепи якоря. Якорь остается под напряжением, но оказывается включен последовательно с обмоткой реле КТ1, благодаря чему через него проходит незначительный ток. Реле КТ1 сработает, разомкнет свой контакт в цепи контакторов КМ1 и КМ2, они отключатся и разомкнут свои контакты, закорачивающие сопротивления R1 и R2. Произойдет останов двигателя, но его обмотка возбуждения остается подключенной к сети и двигатель тем самым подготовлен для следующего пуска. Полное отключение двигателя выполняют выключением автоматического вводного выключателя ВВ.
Динамическое торможение двигателей также выполняется в функции времени. Для динамического торможения, например асинхронного двигателя, обмотка статора отключается от сети переменного тока и по одной из схем, показанных в табл.1, подключается к источнику постоянного тока. В лесной и деревообрабатывающей промышленности постоянный ток получают от специальных полупроводниковых выпрямителей. В этом случае отпадает необходимость в специальном источнике постоянного тока.
При включении обмотки статора по одной из схем (см. табл. 1) к выпрямителю в обмотке создается неподвижное в пространстве магнитное поле. В неподвижном поле по инерции продолжает вращаться ротор двигателя. В роторе двигателя при этом будут создаваться переменная ЭДС и ток, который будет возбуждать переменное магнитное поле. Переменное магнитное поле ротора при взаимодействии с неподвижным полем статора создает тормозной момент. При этом запасенная кинетическая энергия ротором и исполнительным механизмом превращается в цепи ротора в электрическую энергию, а последняя — в тепловую.
Тепловая энергия рассеивается из цепи ротора в окружающую среду. Выделение тепла в роторе будет нагревать двигатель. Количество выделенного тепла зависит от тока в обмотке статора при питании ее постоянным током. В зависимости от принятой схемы включения обмотки статора при питании ее постоянным током отношение тока к фазному току статора будет различным. Соотношения этих токов для различных схем включения показаны в табл. 1
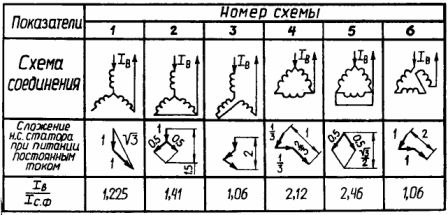
Схема динамического торможения асинхронного двигателя показана на рис. 6.
ПУСК АСИНХРОННОГО ДВИГАТЕЛЯ

Асинхронные электрические двигатели с короткозамкнутым ротором благодаря своей крайней простоте получили широкое распространение, особенно в трехфазных сетях, где им не требуются дополнительные пусковые или смещенные по фазе обмотки.
При правильной эксплуатации асинхронный электродвигатель становится практически вечным – единственное, что в нем может потребовать замены, это подшипники ротора.
Однако ряд особенностей асинхронных двигателей определяет специфику их пускового режима: отсутствие обмотки якоря означает отсутствие противоЭДС индукции в момент включения обмоток статора, а следовательно – высокий пусковой ток.
Если для маломощных электрических двигателей это не критично, то в промышленных электродвигателях пусковые токи могут достигать очень высоких значений, что приводит к просадкам напряжения в сети, перегрузкам подстанций и электропроводки.
ПРЯМОЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Как уже было сказано выше, прямое включение обмотки асинхронного двигателя может применяться только при низкой мощности. В этом случае пусковой ток превышает номинальный в 5-7 раз, что не является проблемой для коммутационного оборудования и электропроводки.
Включение в сеть нового электродвигателя может вызвать настолько сильную просадку напряжения, что уже работающие двигатели остановятся, а новому мотору не хватит пускового момента, чтобы стронуться с места.
Пусковой ток асинхронного двигателя достигает максимального значения в момент включения и плавно снижается до номинального по мере раскрутки ротора.
Следовательно, для уменьшения времени перегрузки сети асинхронный двигатель должен включаться с минимальной нагрузкой, если это возможно.
Мощные токарные станки, гильотины для рубки металла не имеют фрикционных муфт, и все их вращающиеся механизмы раскручиваются в момент включения электродвигателя.
В этом случае длительные просадки напряжения приходится прямо закладывать в проектируемое для них электроснабжение.
ПЛАВНЫЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Логичным способом снижения пускового тока стало снижение напряжения, подаваемого на статор в момент запуска, с его постепенным увеличением при разгоне двигателя.
Также могут использоваться и дроссели высокой индуктивности (реакторы), а также автотрансформаторы.
Подобный способ плавного пуска имеет очевидные недостатки:
Работа контакторов не привязывается к реальному значению тока, они либо переключаются вручную, либо перебираются с помощью реле времени автоматически.
Усложнение пуска под нагрузкой.
Так как крутящий момент асинхронного двигателя пропорционален квадрату напряжения питания, снижение напряжения в момент пуска в 2 раза приведет к снижению крутящего момента в 4 раза. Применение плавного пуска с электродвигателями, напрямую подключенными к нагрузке, значительно увеличивает время выхода на рабочие обороты.
Совершенствование силовой электроники позволило создать компактные автоматические устройства плавного пуска (также называемые софтстартерами от английского soft start – «мягкий пуск») для асинхронных электродвигателей, устанавливаемые на стандартную монтажную рейку электрощитов.
Они обеспечивают не только плавный разгон, но и торможение двигателя, позволяя регулировать параметры токов пуска и остановки в различных режимах:
В момент запуска ток ограничивается на заданном превышении номинального и удерживается на этой величине все время разгона двигателя. Обычно используется ограничение на уровне 200-300% номинального тока. Перегрузка становится малозначительной, хотя ее длительность возрастает.
В данном случае токовая кривая в момент включения двигателя имеет больший наклон, после чего софтстартер переходит в режим токоограничения.
Такой метод плавного пуска применяется при подключении к маломощным подстанциям или генераторам для снижения стартовой нагрузки, однако пусковой момент электродвигателя в данном случае минимален. Для устройств, лишенных холостого хода электродвигателя, использовать формирование тока с пологой стартовой кривой невозможно.
Ускоренный пуск (кик-старт).
Применяется с двигателями, напрямую приводящими нагрузку, так как иначе их пусковой крутящий момент может оказаться недостаточным для страгивания ротора.
В этом случае устройство плавного пуска допускает кратковременное превышение пускового тока в несколько раз (фактически осуществляется прямая коммутация), по истечении заданного времени ток снижается до двух-трехкратного превышения номинала.
Останов на выбеге.
При отключении двигателя напряжение с него снимается полностью, вращение якоря продолжается по инерции. Наиболее простой способ коммутации, применимый при небольших мощностях и малой инерции привода.
Однако в момент разрыва цепи происходит сильный индуктивный выброс, приводящий к сильному искрению в контакторах. На мощных электродвигателях, а также при высоких рабочих напряжениях данный способ отключения неприемлем.
Линейное снижение напряжения.
Применяется для более плавной остановки двигателя. Нужно помнить, что крутящий момент двигателя при этом снижается нелинейно из-за квадратичной зависимости момента от напряжения, то есть снижение момента происходит наиболее резко в начале кривой.
Отключение питания происходит при минимальном токе в обмотке, соответственно коммутирующие выключатели практически не изнашиваются образованием искры между контактами.
Для снижения нагрузок при остановке применяется управляемое снижение напряжения:
- вначале ток снижается минимально;
- затем кривая начинает снижаться круче.
Снижение крутящего момента электродвигателя при этом близко к линейному. Этот способ управления остановом электродвигателя применяется в устройствах с высокой инерционностью привода.
При использовании такого рода устройств плавного пуска пусконаладочные работы заключаются в настройке нужного типа кривой пускового тока и, в случае использования режимов формирования тока или ускоренного старта, настройке длительности временного интервала начального участка кривой.
Применение устройств плавного пуска позволяет автоматизировать пусковой режим, но его главный минус остается – либо приходится закладывать в устройство возможность холостого хода электродвигателя, либо допускать кратковременные перегрузки сети, раскручивая мотор и нагрузку с кик-стартом.
ПУСК ПО СХЕМЕ ЗВЕЗДА-ТРЕУГОЛЬНИК
Другим способом запуска, использующимся на трехфазных двигателях, является перекоммутация обмоток: в момент пуска обмотки соединяются звездой, по мере разгона ротора обмотки переводятся в нормальное включение треугольником.

Такой метод пуска фактически является частным случаем способа пуска асинхронного электродвигателя на пониженном напряжении, так как напряжение на обмотках при этом снижаетсяпримерно в 1,73 раза.
Подобный способ пуска может быть легко реализован с помощью набора контакторов с ручным управлением или с приводом от реле времени, поэтому достаточно дешев и распространен. Основные недостатки этого способа:
- При отказе одного из контакторов произойдет нарушение коммутации, в результате чего либо станет невозможным пуск, либо значительно снизится мощность двигателя.
- Снижение напряжения и тока является фиксированным.
- Крутящий момент двигателя при включении обмоток звездой уменьшается, поэтому запуск желательно также производить без нагрузки.
ПУСК ЭЛЕКТРОДВИГАТЕЛЯ ЧЕРЕЗ ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ
Наиболее гибкий способ управления не только режимом пуска, но и рабочими характеристиками асинхронного электродвигателя – это применение частотного преобразователя. По своей сути частотный преобразователь представляет собой узкоспециализированный инвертор:
- входное напряжение в нем выпрямляется;
- затем заново преобразуется в переменное, но уже с заданной частотой и амплитудой.

Это происходит благодаря работе генератора широтно-импульсной модуляции (ШИМ), который создает серию прямоугольных импульсов заданной частоты и скважности (отношения длительности импульса к его периоду). Генерируемые импульсы управляют силовыми ключами, коммутирующими выпрямленное напряжение питания на обмотки выходного трансформатора.
Как осуществляется плавный пуск через частотный преобразователь?
В данном случае становится возможным плавное изменение не только напряжения, но и частоты питающего электродвигатель напряжения. Благодаря тому, что ШИМ-генератор частотного преобразователя легко может управляться с обратной связью по потребляемому току, становится возможным пусковой режим, в котором ток не превышает номинальный – таким образом перегрузка питающей сети фактически отсутствует.
Однако такой пусковой режим требует значительного усложнения частотного преобразователя, поэтому для управления асинхронными электродвигателями обычно используется комбинация с отдельным устройством плавного пуска (УПП).
© 2012-2020 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов