Подборка схем регулятора оборотов двигателя постоянного тока
Производить регулировку скорости вращения вала коллекторного электродвигателя, имеющего малую мощность, можно подсоединяя последовательно в электроцепь его питания резистор. Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения.

Основное, что этот способ временами приводит к полной остановке электродвигателя при низком напряжении питания. Регулятор оборотов электродвигателя постоянного тока, описанные в данной статье, не имеют эти недостатки. Данные схемы можно с успехом применять и для изменения яркости свечения ламп накаливания на 12 вольт.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
На транзисторе VT1 (однопереходном) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.

Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).

Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на популярном таймере NE555. Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.

Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:

Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
Регулятор оборотов электродвигателя: назначение, принцип работы
В большинстве современных бытовых и промышленных приборов применяются электрические машины, совершающие какую-либо полезную работу. В качестве рабочего инструмента в них могут выступать самые разнообразные приспособления, которые необходимо вращать с различной скоростью. Для изменения этого параметра используется регулятор оборотов электродвигателя.
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
- Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
- Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
 Рис. 1. Схема тиристорного регулятора
Рис. 1. Схема тиристорного регулятора
Как видите на схеме, подаваемое на тот же асинхронный однофазный электродвигатель напряжение, проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора T1. Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.
 Регулировка оборотов на транзисторах
Регулировка оборотов на транзисторах
Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
 Пример частотного регулирования
Пример частотного регулирования
- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
 Регулировка оборотов переключением пар полюсов
Регулировка оборотов переключением пар полюсов
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:
 Схема подключения регулятора
Схема подключения регулятора
Далее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:
 Распиновка регулятора
Распиновка регулятора
Затем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.
 Проверьте цветовую маркировку
Проверьте цветовую маркировку
Если все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.
Регулятор оборотов коллекторного микроэлектродвигателя для РУ модели
Желание собрать радиоуправление у меня созрело достаточно давно. Но дальше поиска схем, с последующим пониманием, что прошивку автор не даст, дело не продвинулось. В итоге, затея была похоронена в стадии развития. Но недавно мне на глаза попались модули, именуемые NRF24L01+ (стоит 0.6$ на Ali), и уже позабытое желание собрать радиоуправление загорелось с новой силой.
В конечном счете, была разработана схема радиоуправления, а так же несколько сопутствующих устройств. Об одном из них и пойдет речь в данной статье. К слову, в следующих статьях будет описано само радиоуправление, а так же зарядное устройство для li-ion аккумуляторов.
Регулятор оборотов двигателя — это название слышал любой моделист, а в особенности те, кто собирал авиа- и судомодели. Это устройство незаменимо, так как оно обеспечивает плавное управление скорость двигателя.
Существует множество вариантов исполнения таких регуляторов: на микроконтроллерах, на жесткой логике и даже на дискретных компонентах. После просмотра уже готовых схем, я понял что придется делать что-то свое — на логике собирать не хотелось, на дискретных компонентах выходило уж очень громоздко. Найденные схемы на микроконтроллерах были в общем-то неплохими, да вот только вариант собирать то, принцип действия чего я не смогу объяснить, меня не привлекал (а прошивку авторы выкладывать не спешили).
После всего этого и была разработана и собрана схема.
Итак, краткие характеристики (при номиналах деталей, указанных на схеме):
- Диапазон питающих напряжений: 7 . 35В
- Максимальный ток: 3А
- Длительность управляющего импульса: 1 . 2мс
- Рекомендованный период импульсов: 20мс
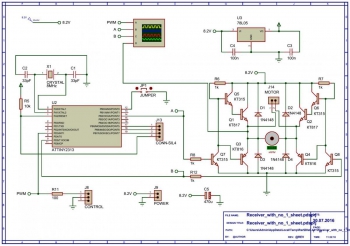
Силовая часть представляет собой Н-мост с дополнительными маломощными управляющими транзисторами. Управление оборотами двигателя производится ШИМ сигналом, генерируемым МК. Скважность ШИМ зависит от длительности импульса, поступающего на вход устройства.
Обработку сигналов и управление транзисторами в этой схеме выполняет микроконтроллер ATtiny2313. Этот выбор ничем не обусловлен, кроме того, что он у меня валялся под рукой на момент проектировки устройства. Изначально, в схеме планировалось использование полевых транзисторов, но позже я от них отказался в пользу более доступных советских биполярников (которых практически у каждого целый ящик). Конечно, это наложило свой отпечаток на параметры: максимальный ток значительно снизился, как и цена девайса.
Как уже упоминалось, напряжение питания устройства может варьироваться от 6 до 30 вольт. Это обусловлено границами напряжения, которое может выдержать интегральный стабилизатор LM7805, а так же двигатель (на него подается напряжение, отличное от питающего примерно на 1 вольт).
Максимальный ток зависит от применяемых транзисторов. В моем варианте — это КТ816/817, максимальный ток коллектора которых равен трем амперам.
В качестве маломощных управляющих транзисторов использованы распространенные КТ315.
Для более точного измерения длительности управляющего (серво) импульса был применен кварцевый резонатор на частоту 8МГц.
Диоды D1 — D4 желательно монтировать. Будет работать и без них, но вопрос в том, как долго.
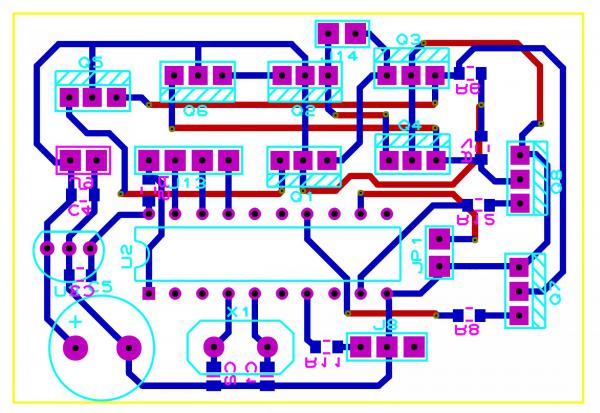
Печатная плата устройства выполнена на одностороннем фольгированном материале (стеклотекстолит, гетинакс). Дорожки выделенные красным — перемычки с лицевой стороны. В моем варианте транзисторы монтируются вне платы на радиаторе.
Печатная плата устройства (синие проводники — обратная сторона):
Принцип работы
При получении импульса, запускается 16 битный таймер, который останавливается по спаду импульса. Таймер настроен таким образом, что каждый его такт — это 1мкс, что позволяет упростить вычисления. После определения длительности импульса происходит сравнение с заданной величиной. Результат записывается в регистр OCR1A/B в зависимости от положения джампера и длительности импульса.
Исходный код приведен ниже. Так же его можно взять в приложении к статье.
В наладке устройство не нуждается, и должно работать сразу после правильной сборки и прошивки микроконтроллера. С последним будьте осторожны — не отключите ненароком бит RSTDISBL. Это может стоить вам нового микроконтроллера (если у вас конечно нет параллельного программатора).
Транзисторы КТ315 можно заменить любыми маломощными кремниевыми транзисторами структуры n-p-n. КТ816/817 — аналогичными по параметрам (или более мощными). К примеру, КТ818/819 и т.д. Резисторы можно заменить на аналогичные по мощности с допуском 20-30% от номинального сопротивления. Линейный стабилизатор LM7805 можно заменить на отечественный аналог КРЕН5А, а так же применить импульсный стабилизатор, но придется переработать печатную плату.
Фото , а так же видео работы устройства можно увидеть ниже.



Извиняюсь за не очень презентабельный вид платы — изначально это был тестовый вариант «на первое время». Но так как устройство с первого раза заработало так как от него требовалось, то «временный вариант» перерос в постоянный.