ПОВОРОТ ДВУХОСНОГО АВТОМОБИЛЯ С ПЕРЕДНИМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ
Поворот колесной машины можно рассматривать в двух характерных режимах движения:
поворот автомобиля, движущегося по горизонтальной опорной поверхности с малой скоростью (статический поворот);
поворот автомобиля, движущегося с большой скоростью (динамический поворот).
Первый режим поворота характеризуется отсутствием центробежной силы, малым боковым ускорением и практическим отсутствием бокового увода колес. Иногда этот режим рассматривают как движение машины, имеющие жесткие, недеформируемые в боковом направлении шины.
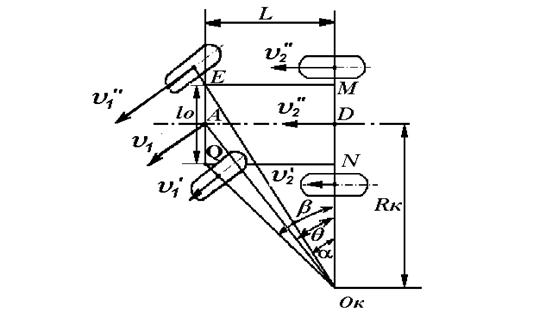
Рассмотрим схему поворота двухосной машины с передними управляемыми колесами при качении колес без бокового увода (рис.6).
Ок — кинематический центр поворота – это центр поворота автомобиля, движущегося по твердой горизонтальной опорной поверхности с пренебрежимо малым боковым ускорением при отсутствии тягового усилия на колесах;
 — кинематический радиус поворота;
— кинематический радиус поворота;
 — поступательные скорости центров колес;
— поступательные скорости центров колес;
 — поступательные скорости передней и задней осей автомобиля.
— поступательные скорости передней и задней осей автомобиля.
Для обеспечения чистого качения все колеса автомобиля должны перемещаться вокруг одной точки – точки Ок,, являющейся кинематическим центром поворота. Это условие будет выполняться в том случае, если управляемые колеса переднего моста будут повернуты вокруг шкворней на различные углы  и
и  , а кинематический центр поворота будет находится на продолжении оси задних колес в точке пересечения о прохождением осей передних колес.
, а кинематический центр поворота будет находится на продолжении оси задних колес в точке пересечения о прохождением осей передних колес.
Зависимость между углами и , отвечающая условию идеального поворота, определяется из схемы поворота и должна отвечать условию:
 (4)
(4)
 где
где  — расстояние между осями шкворней поворотных кулаков;
— расстояние между осями шкворней поворотных кулаков;
 — база автомобиля.
— база автомобиля.
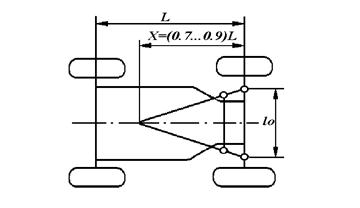
Необходимое соотношение углов поворота управляемых колес, достигается за счет выбора оптимальных параметров рулевой трапеции. На рисунке 7 представлена схема параметров рулевой трапеции.
Основным параметром, характеризующим поворот автомобиля при качении колес без бокового увода, является кинематический радиус поворота ().
Кинематический радиус поворота – это расстояние от кинематического центра поворота до продольной оси автомобиля.
По другому этот радиус может быть назван как радиус поворота автомобиля без учета бокового увода колес.
При качении колес без бокового увода из треугольника АОD (рис. 6) находим:
 (5)
(5)
где θ— средний угол поворота управляемых колес.
 (6)
(6)
где и — углы поворота соответственно внешнего и внутреннего управляемых колес.
Рассмотрим особенности поворота 3-хосного автомобиля (рис. 8).
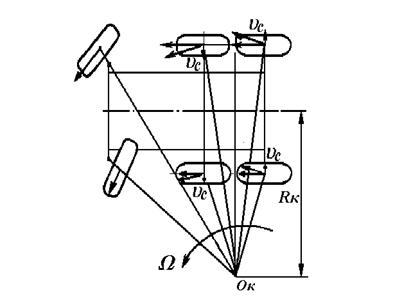 Рис. 8.
Рис. 8.
Особенностью поворота трехосного автомобиля с расстановкой осей по базе 1+2 заключается в том, что кинематический центр поворота расположен на продолжении продольной оси балансирной тележки.
В этом случае предлага-ется, что скольжение про-межуточной оси происхо-дит в направлении центра поворота, а задней оси – от центра поворота.
Таким образом в машинах, у которых не менее двух осей, имеющих неуправляемые колеса, неизбежна либо боковая деформация шин, либо боковое скольжение колес этих осей, либо и то и другое, т.к. иначе невозможно получить мгновенный центр поворота.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Автомобили. Теория
Главная > Лекция >Транспорт
ПОВОРОТ ДВУХОСНОГО АВТОМОБИЛЯ С ПЕРЕДНИМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ
Поворот колесной машины можно рассматривать в двух характерных режимах движения:
поворот автомобиля, движущегося по горизонтальной опорной поверхности с малой скоростью (статический поворот);
поворот автомобиля, движущегося с большой скоростью (динамический поворот).
Первый режим поворота характеризуется отсутствием центробежной силы, малым боковым ускорением и практическим отсутствием бокового увода колес. Иногда этот режим рассматривают как движение машины, имеющие жесткие, недеформируемые в боковом направлении шины.
Рассмотрим схему поворота двухосной машины с передними управляемыми колесами при качении колес без бокового увода (рис.6).
Ок — кинематический центр поворота – это центр поворота автомобиля, движущегося по твердой горизонтальной опорной поверхности с пренебрежимо малым боковым ускорением при отсутствии тягового усилия на колесах;
— кинематический радиус поворота;
— поступательные скорости центров колес;
— поступательные скорости передней и задней осей автомобиля.
Для обеспечения чистого качения все колеса автомобиля должны перемещаться вокруг одной точки – точки Ок,, являющейся кинематическим центром поворота. Это условие будет выполняться в том случае, если управляемые колеса переднего моста будут повернуты вокруг шкворней на различные углы и , а кинематический центр поворота будет находится на продолжении оси задних колес в точке пересечения о прохождением осей передних колес.
Зависимость между углами и , отвечающая условию идеального поворота, определяется из схемы поворота и должна отвечать условию:
г де — расстояние между осями шкворней поворотных кулаков;
Необходимое соотношение углов поворота управляемых колес, достигается за счет выбора оптимальных параметров рулевой трапеции. На рисунке 7 представлена схема параметров рулевой трапеции.
Основным параметром, характеризующим поворот автомобиля при качении колес без бокового увода, является кинематический радиус поворота ( ).
Кинематический радиус поворота – это расстояние от кинематического центра поворота до продольной оси автомобиля.
По другому этот радиус может быть назван как радиус поворота автомобиля без учета бокового увода колес.
При качении колес без бокового увода из треугольника АОD (рис. 6) находим:
где θ — средний угол поворота управляемых колес.
где и — углы поворота соответственно внешнего и внутреннего управляемых колес.
Рассмотрим особенности поворота 3-хосного автомобиля (рис. 8).
Особенностью поворота трехосного автомобиля с расстановкой осей по базе 1+2 заключается в том, что кинематический центр поворота расположен на продолжении продольной оси балансирной тележки.
В этом случае предлага-ется, что скольжение про-межуточной оси происхо-дит в направлении центра поворота, а задней оси – от центра поворота.
Таким образом в машинах, у которых не менее двух осей, имеющих неуправляемые колеса, неизбежна либо боковая деформация шин, либо боковое скольжение колес этих осей, либо и то и другое, т.к. иначе невозможно получить мгновенный центр поворота.
Рассмотрим кинематику поворота автомобиля с учетом бокового увода колес.
Прежде чем приступить к изучению кинематики поворота автомобиля с учетом бокового увода колес, необходимо рассмотреть схему сил и моментов, действующих на автомобиль при повороте.
Рассмотрим динамический поворот автомобиля с передними управляемыми и задними ведущими колесами.
При движении на автомобиль почти всегда действует какая-либо боковая сила. Этой силой может быть составляющая веса при боковом уклоне дороги, сила ветра, отдельные, кратковременно действующие случайные силы.
На схеме изображены:
— центробежная сила и ее составляющие;
— сила тяги соответственно левого и правого ведущего колеса;
— сила тяги автомобиля;
— боковые реакции опорной поверхности, действующие на колеса автомобиля;
— результирующие боковые реакции опорной поверхности, действующие, соответственно, на переднюю и заднюю оси;
— момент сопротивления повороту автомобиля, обусловленные трением в межколесном дифференциале;
— момент инерции автомобиля относительно вертикальной оси, проходящий через центр.
При совершении поворота на автомобиль всегда действует боковая сила, обусловленная действием центробежной силы. Так как колеса автомобиля имеют эластичные шины, то при действии центробежной силы возникает боковой увод колес, вследствие чего изменяется радиус поворота и траектория движения автомобиля.
Рассмотрим качение колеса с боковым уводом.
3.1. Качение колеса с боковым уводом.
Автомобильное колесо обладает радиальной, тангенциальной и боковой эластичностью. Управляемость и устойчивость автомобиля в значительной степени зависят от боковой эластичности автомобильного колеса.
Исследуем качение сначала «жесткого», а затем «эластичного» колеса.
При действии боковой силы «жесткое» колесо будет катиться в направлении своей плоскости вращения при всех значениях боковой силы, меньших, чем сила сцепления колеса с опорной поверхностью. Когда боковая сила превысит силу сцепления ( ), тогда колесо будет катиться и скользит в направлении боковой силы.
«Эластичное» в боковом направлении колесо уже при малой боковой силе будет двигаться в направлении, не совпадающим с плоскостью его вращения.
Сущность происходящих при этом процессов поясним на схеме (рис.10).
Рассмотрим качение эластичного колеса по горизонтальной плоскости А-А, когда боковая сила отсутствует. В этом случае линия ОО проходит по середине протектора. При качении колеса его точки В, С, Д, находящиеся на этой линии, касаются дороги в точках соответственно В1, С1, Д1 и траектории качения колеса (линия ОК) будет располагаться в плоскости симметрии колеса.
При действии на колесо боковой силы , вертикальная плоскость, проходящая через центр колеса, сместится относительно центра отпечатка на величину (рис. 10б), а линия ОО, проходящая по середине протектора, будет изогнутой. Вследствие этого, при качении колеса точка В войдет в контакт с дорогой в точке В2 , точка С в точке С2, а точка Д точке Д2. При дальнейшем качении колеса все точки, лежащие на середине протектора, будут иметь контакт с дорогой по линии ОК. В этом случае траектория качения колеса (линия ОК) отклонится от плоскости симметрии колеса на угол
При увеличении боковой силы будет увеличиваться и угол увода (рис. 11). Элементарные реакции, в пятне контакта будут увеличиваться и когда их равнодействующая Ry достигнет предельного значения, равного произведению , колесо начнет скользить по опорной поверхности всей поверхностью отпечатка шины.
Таким образом, отклонение вектора скорости эластичного колеса от плоскости его вращения при действии любой по величине боковой силы называется явлением бокового увода (или просто уводом), а угол между этим вектором и плоскостью вращения – угол увода.
Прямолинейный участок ОА кривой определяет следующая зависимость между боковой силой и углом увода.
г де — коэффициент сопротивления уводу колеса, Н/рад. —
С достаточной точностью можно считать, что коэффициент сопротивления боковому уводу остается постоянным или мало меняется при углах увода до 80 –100 .
Кинематика поворота автомобиля.




![]()
![]()
Существуют следующие способы поворота колесной машины.
1) Поворот передних управляемых колес.
2) Совместный поворот передних и задних управляемых колес.
3) Поворот бортом без управляемых колес за счет отключения передачи вращающего момента на правые или левые неуправляемые колеса и торможение колес, внутренних по отношению к кривой поворота. Поворот без управляющих колес может быть осуществлен созданием разных скоростей вращения колес левого и правого бортов машины (по аналогии с гусеничной машиной).
4) Поворот путем комбинации рассмотренных выше способов.
5) Поворот за счет поворота передней части остова машины при сочлененной раме.
Третий способ поворота (бортом) имеет смысл использовать на машинах со всеми одинакового размера ведущими колесами большого диаметра. При этом упрощается привод к ведущим колесам и компоновка передних колес, однако, повышается износ шин.
На рис.6 схематически показан поворот колесной машины с управляемыми передними колесами (наиболее типичный вариант).
Мгновенный цент поворота О1 находится в точке пересечения перпендикуляров к векторам скоростей движения колес. Расстояние от центра поворота О1 до оси заднего моста автомобиля принято называть радиусом поворота R = L·ctg α. При повороте передних управляемых колес машины на одинаковый угол такое пересечение будет невозможно, так как перпендикуляры к векторам скоростей этих колес будут параллельны.
В этом случае движение на повороте сопровождалось бы скольжением управляемых колес вбок, управляемость машины ухудшалась бы, а износ шин и сопротивление движению возросли.
Как следует из рис.6, чистое качение управляемых колес машины без скольжения при движении на криволинейных участках возможно лишь в том случае, если между углами поворота внутреннего α1 (ближнего к центру поворота) и внешнего α2 (удаленного от центра поворота) колес будет следующее соотношение:
 ,
,
где α1 и α2 – соответственно углы поворота внутреннего и внешнего управляемых колес;
В – расстояние между осями шкворней поворотных цапф (приближенно может быть принято равным ширине колеи);
Выполнение этого условия достигается с помощью шарнирного четырехзвенника, называемого рулевой трапецией, соединяющей между собой управляемые колеса. Подбирая соответствующие значения параметров рулевой трапеции, геометрию элементов и кинематику в целом, получают соотношение между углами α1 и α2 , близкое к теоретическому. Однако рулевая трапеция не может обеспечить точно заданное (теоретическое) соотношение между углами поворота колес при различных их величинах, в тех пределах, в которых это не
 |
обходимо на автомобилях.
Рис.6. Схема, иллюстрирующая поворот машины с управляемыми