«Бесколлекторные двигатели» ЛикБез и проектирование
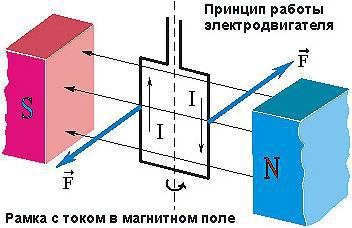
Принцип работы электрического двигателя:
В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
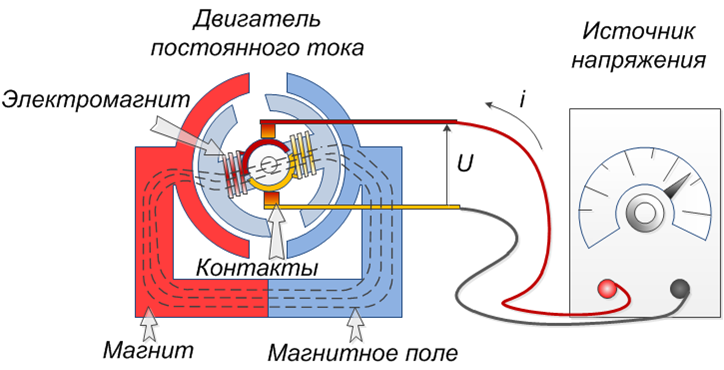
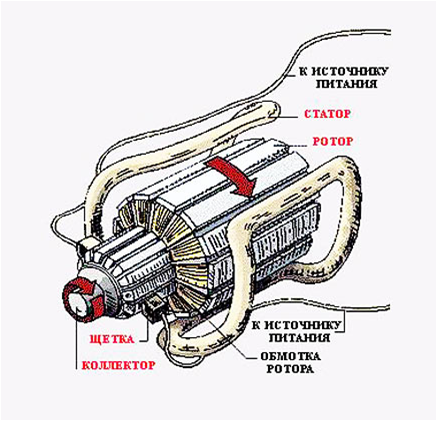
Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель — это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
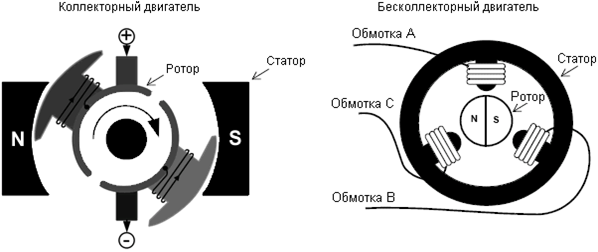
Устройство бесколлекторного двигателя:
Inrunner (произносится как «инраннер»). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner (произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами. 
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.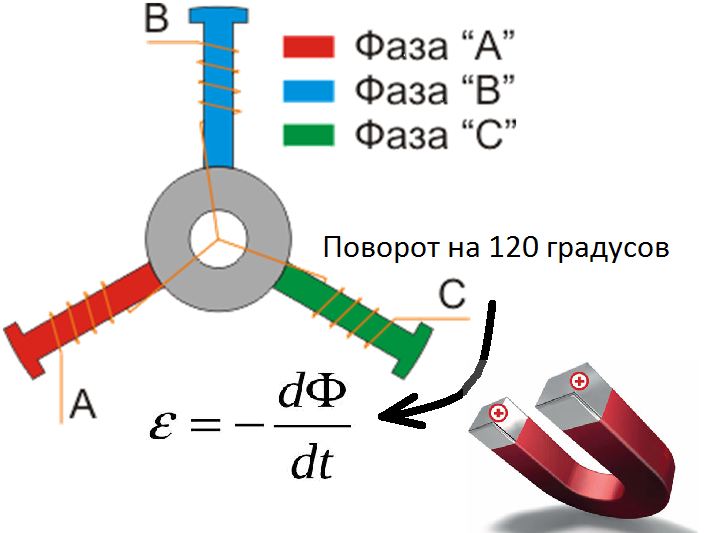
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток: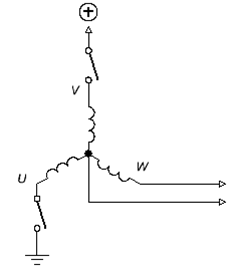
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):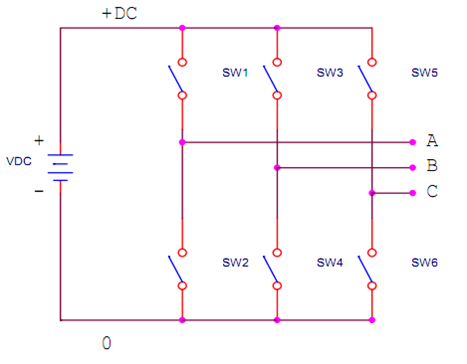
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).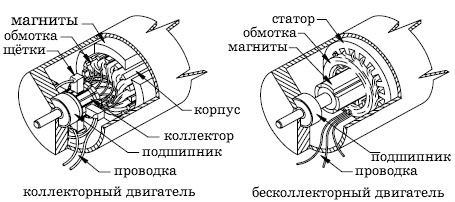
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки 🙂
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм 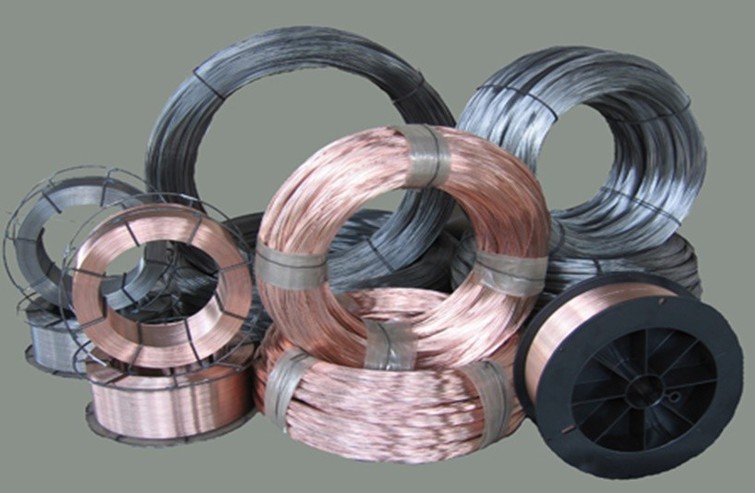
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение. 
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1.73 раз. (впоследствии было выбрано соединение треугольник) 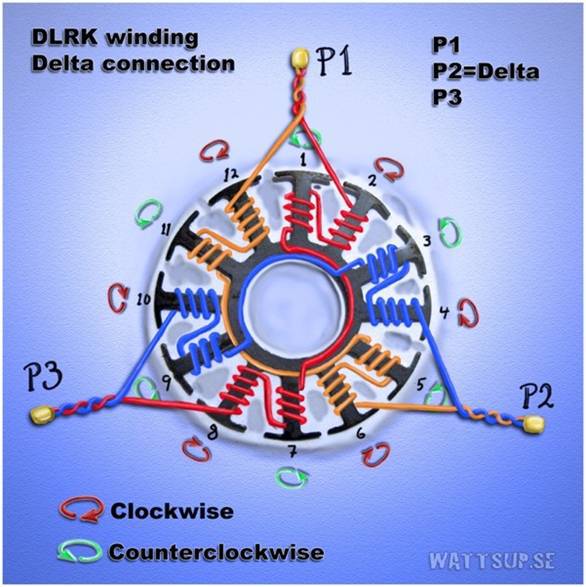
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея. 
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.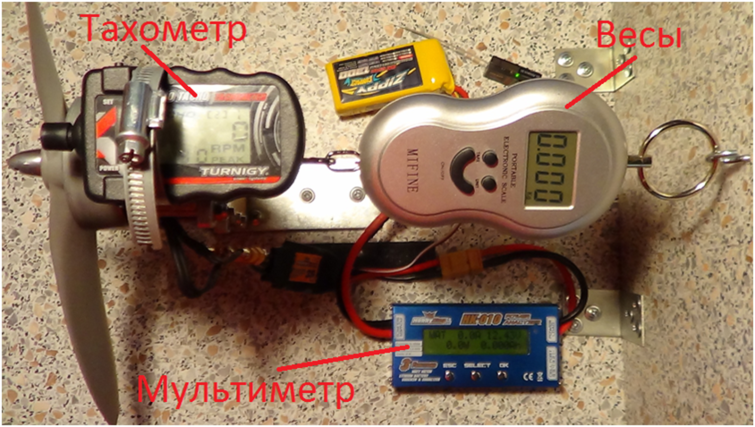
Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки: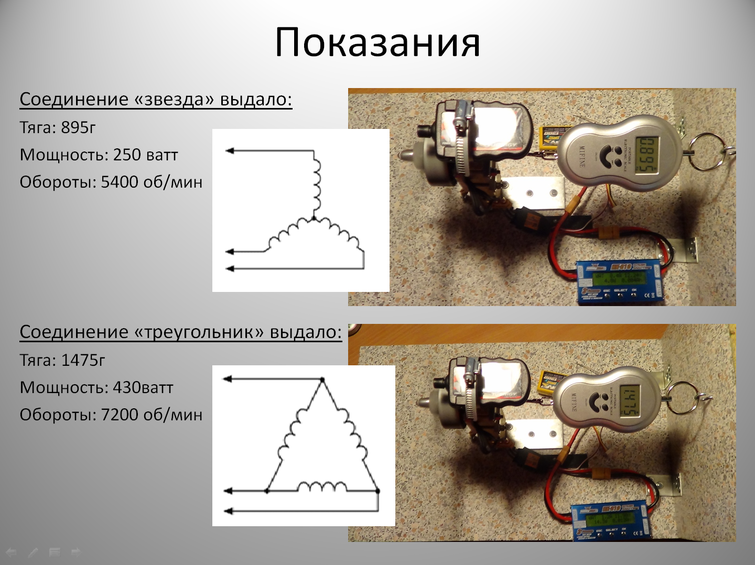
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм. 
Характеристики полученного двигателя:
Потребляемый ток: 34.1А
Ток холостого хода: 2.1А
Сопротивление обмоток: 0.02 Ом
Количество полюсов: 14
Обороты: 8400 об/мин
Видеоотчет испытания двигателя на самолете. Мягкой посадки 😀
Расчет КПД двигателя: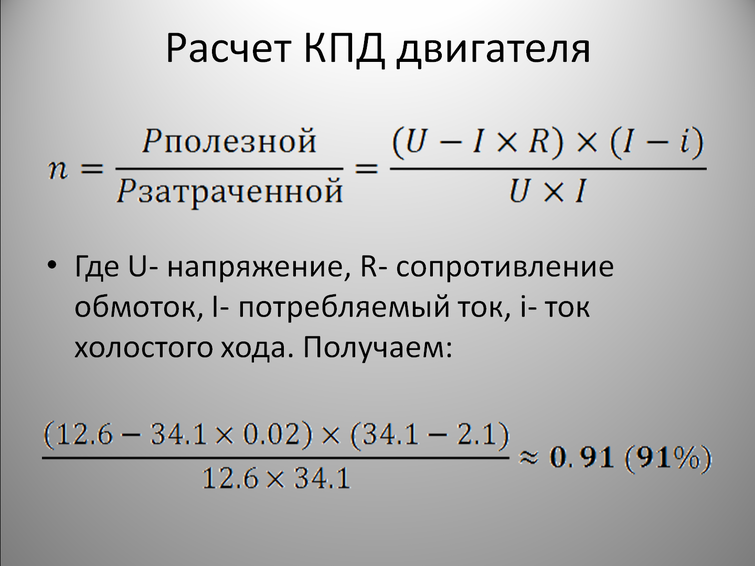
Очень хороший показатель. Хотя можно было еще выше добиться. 
Выводы:
1) У бесколлекторных двигателей высокая эффективность и КПД
2) Бесколлекторные двигатели компактны
3) Бесколлекторные двигатели можно использовать во взрывоопасных средах
4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи. Удачи всем)
Трёхфазный бесколлекторный двигатель
1. Двигатель стиральной машины с прямым приводом
Пожалуй уже каждый слышал о стиральных машинах с прямым приводом барабана. Но до сих пор, даже не все специалисты по ремонту стиральных машин знают как устроен и как работает двигатель в такой машине.
Сама идея конечно не новая, ведь за основу взят шаговый двигатель, который уже давно получил распространение во многих электротехнических устройствах. А вот первое применение его в конструкции стиральной машины в качестве привода барабана, принадлежит корейскому концерну LG. С середины 2005 года, компания LG начала активно продвигать свою продукцию, заявляя о 10-ти летней гарантии на двигатель для стиральных машин с прямым приводом.
Сегодня, помимо LG, компании Samsung, Haier и Whirpool в ряде моделей стиральных машин стали применять подобные двигатели. Забегая вперёд, можно сказать, что компания LG не просчиталась и двигатель для прямого привода барабана действительно довольно надёжный и имеет преимущество по сравнению с более традиционным и распространённым коллекторным двигателем.
2. Устройство двигателя
Двигатель стиральной машины с прямым приводом, представляет собой трёхфазный бесколлекторный двигатель постоянного тока, отчасти похожий на шаговый двигатель, но это не совсем так. В иностранной литературе его ещё часто называют BLDC (Brushless Direct Current Motor — бесщёточный мотор постоянного тока), для удобства мы тоже будем применять эту аббревиатуру.
Такой двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Различают два вида подобных двигателей:
Inrunner, у которых магниты ротора находятся внутри статора с обмотками, и Outrunner, у которых магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. В стиральных машинах с прямым приводом применяется Outrunner тип двигателя.
В этой статье мы ознакомим с устройством двигателя от стиральной машины LG.
3. Ротор
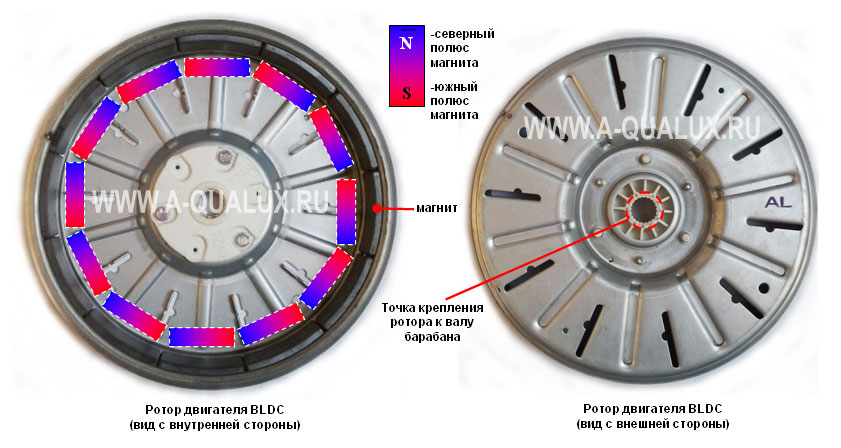
Рис.2 Ротор двигателя стиральной машины LG с прямым приводом
Ротор BLDC — вращающаяся часть двигателя (Рис.2) По форме напоминает чашу, к внутренней стороне которой специальным клеем крепятся магниты прямоугольной формы. Магниты всегда имеют чётное количество и установлены с чередованием полюсов. В нашем случае установлено 12 магнитов, размер которых зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. В центре ротора есть специальное посадочное отверстие с насечками, что позволяет, при помощи болта или гайки, закрепить ротор напрямую к валу барабана. С внешней стороны ротора, продавлено 10 щелей образующих на обратной его стороне небольшие лопасти для охлаждения обмоток статора.
4. Статор
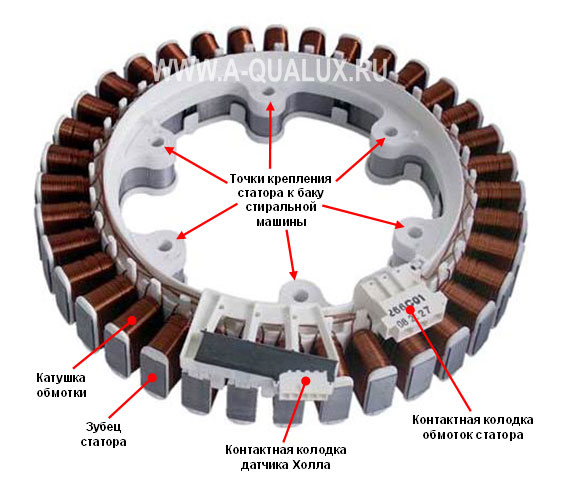
Рис.3 Статор двигателя стиральной машины LG с прямым приводом
Статор BLDC — неподвижная часть двигателя и крепится к задней части бака стиральной машины (Рис.3) Статор состоит из нескольких листов магнитопроводящей стали заключённый в пластиковый каркас, который служит изолятором. В целом, каркас статора напоминает круг с прямоугольными зубьями. На каждый зуб статора наматывается катушка.
Обмотка трёхфазного бесколлекторного двигателя изготовлена из медной проволоки толщиной 1 мм. Классическая обмотка выполняется одним проводом для одной фазы, то есть все обмотки на зубьях одной фазы соединены последовательно. В данном случае статор имеет 36 зубьев — это значит по 12 зубьев на одну фазу. Сопротивление обмотки каждой фазы порядка 10 Ом.
Как известно, в трёхфазных двигателях, обмотки соединяют по схеме звезда или треугольник.
В нашем случае, обмотки статора соединены по схеме звезда, т.е. концы фаз имеют общую точку (Рис.4)
Поскольку в каждый момент времени работают только две фазы (при включении звездой), магнитные силы воздействуют на ротор неравномерно по всей окружности (Рис.5).
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее (Рис.6)
 |
Рис.4 Соединение обмоток по схеме «звезда»

Рис.5 Воздействие магнитных сил на ротор

В двигателе стиральной машины LG, распределение фазных обмоток, а также относительное положение ротора и статора можно увидеть ниже (см. Рис.7). На схеме производителя, фазные обмотки обозначают буквами : V, W, U

Рис.7 Трёхфазный двигатель постоянного тока (BLDC) стиральной машины LG (общий вид)
Для контроля положения ротора применяется датчик работающий на эффекте Холла. Датчик реагирует на магнитное поле и поэтому его располагают на статоре таким образом, чтобы магниты ротора воздействовали на него.
5. Система управления трёхфазным двигателем (BLDC)
Стоит отметить, что система управления двигателем BLDC и схема её реализации аналогична схеме управления трёхфазным асинхронным двигателем описанной в другой нашей статье. Что бы в точности не повторяться, поясним всё же немного по другому.
Управление двигателем с прямым приводом построено на инверторе напряжения с широтно-импульсной модуляцией. Инвертор — (от лат. inverto — поворачивать, переворачивать) — элемент вычислительной схемы, осуществляющий определённые преобразования сигнала изменяемой амплитуды и частоты. К примеру, в инверторе, сетевое напряжение 220 вольт с частотой 50 Гц, преобразуется в постоянное напряжение, а параметры питания обмоток статора двигателя могут колебаться от 0 до 120 вольт с частотой до 300 Гц.
Двигатель постоянного тока имеет три вывода (т.е. три фазы), на которые в разный момент времени подаётся «+» и «-» питания. Это реализуется при помощи IGBT (биполярных транзисторов с изолированным затвором) представляющие электронные силовые ключи, включённые по мостовой схеме (Рис.8)

Рис.8 Условная схема силовой части инвертора и обмоток двигателя подключённых по схеме «звезда»
Замыкая ключ SW1 подаётся «+» на фазу V , а замыкая SW6 подаётся «-» на фазу U . Таким образом, ток потечет от «+» выпрямителя через фазы V и U . Для обеспечения обратного направления, открывается SW5 и SW2. В этом случае ток потечет от «+» выпрямителя через фазы U и V в обратном направлении. При работе двигателя одновременно должен быть открыт только один верхний и один нижний ключ.
При включении ключей, как показано выше, на двигатель подается полное напряжение питания. При этом двигатель развивает максимальные обороты (мощность). Чтобы обеспечить управление двигателем, нужно регулировать напряжение питания двигателя. Изменение действующего напряжения осуществляется с помощью широтно-импульсной модуляции (ШИМ).
Дадим определение этим терминам:
Широтно-импульсная модуляция (ШИМ) — это управление средним значением напряжения на нагрузке путём изменения скважности импульсов, управляющих ключом. А скважность — это отношение периода следования (повторения) сигнала к длительности (широте) его импульса.
На (Рис.9) представлен график, иллюстрирующий применение трёхуровневой ШИМ для управления электродвигателем, которая используется в приводах асинхронных электродвигателей с переменной частотой. Напряжение от ШИ-модулятора, подаваемое на обмотку двигателя показано в виде прямоугольных импульсов. Пунктирной линией грубо изображён магнитный поток в статоре двигателя. Магнитный поток имеет приблизительно синусоидальную форму, благодаря соответствующему закону ШИМ.
Поэтому, ключи открыты не все время, а открываются, и закрываются с фиксированной частой, но изменяемой скважностью. Таким образом, изменяется действующее напряжение от нулевого до напряжения питания.
Назревает вопрос: зачем нужно менять скважность, зачем эта частота и для чего это всё нужно? Дело в том, что слишком малая частота может быть не эффективной или не обеспечивать необходимой плавности регулирования оборотов двигателя.

Рис.9 График иллюстрирующий напряжение от ШИ-модулятора, подаваемое на обмотку двигателя.
Например: если ротор двигателя имеет два полюса, то при одном полном обороте магнитного поля на статоре, ротор совершает один полный реальный оборот.
При 4 полюсах, чтобы повернуть вал двигателя на один полный оборот потребуется два оборота магнитного поля на статоре. Чем больше количество полюсов ротора, тем больше потребуется электрических оборотов для вращения вала двигателя на один оборот.
В нашем случае, имеется 12 магнитов на роторе. Для того, чтобы провернуть ротор на один оборот, потребуется 12/2=6 электрических оборотов поля. Поэтому, учитывая особенность конструкции двигателя и инверторную систему управления, для питания фаз двигателя необходима электрическая частота значительно выше 50Гц.
Чтобы добиться управления оборотами двигателя нужно наложить сигнал ШИМ, на сигналы, подаваемые на ключи. Для этого, микроконтроллер электронного блока управления, программно формирует ШИМ для каждого из ключей (IGBT). В программу контроллера, производитель закладывает определённый алгоритм и все данные для управления конкретным двигателем.
Мы пояснили немного суть системы управления двигателем, а вот детальный обзор устройства и принцип работы инверторного блока управления — очень объёмный материал и в рамках данной статьи мы рассматривать не будем.
6. Неисправности и диагностика двигателя
Как и говорилось выше, сам по себе двигатель довольно надёжный, относительно простой и в практике известны единичные случаи выхода из строя обмоток статора. Магниты на статоре имеют конечно не самое высшее качество, но их отклеивание или расколы почти не встречались.
Уязвимая деталь, пожалуй только датчик Холла. При возникновении его неисправности, отсутствует сигнал положения ротора, что приводит к некорректной работе системы питания фаз двигателя. В этом случае можно наблюдать, как ротор двигателя стопорится и издаёт дребезжащий металлический звук. В стиральных машинах LG, эта проблема зачастую сопровождается кодом неисправности «SE» на модуле интерфейса.
В отличие от коллекторного двигателя, запустить и проверить трёхфазный двигатель напрямую вне стиральной машины без каких-либо специальных приспособлений не получится, поскольку статор крепится к баку, а ротор к валу барабана стиральной машины. Поэтому, при наличии обычного цифрового мультиметра, можно проверить только сопротивление обмоток фаз статора. В связи с этим, на практике, при диагностировании неисправности, проблемную деталь двигателя или модуль управления, выявляют путём замены детали на заведомо исправную.
7. Преимущества и недостатки BLDC двигателей
Более ярким получится сравнение трёхфазного двигателя (BLDC) с традиционным коллекторным двигателем, которым оснащено большинство стиральных машин.
К преимуществу двигателей BLDC стоит отнести:
- низкий уровень шума
- относительно простая конструкция
- особое позиционирование двигателя в стиральной машине, позволяющее снизить колебание бака
- отсутствие приводного ремня, из-за которого терялась часть полезной энергии двигателя на преодоление сил трения ремня, между шкивом двигателя и шкивом барабана
- отсутствие уязвимого коллекторно-щёточного узла, имеющего ограниченный ресурс и требующего обслуживания
К недостаткам двигателя BLDC относятся:
- достаточно сложная система управления ( по сравнению с коллекторным двигателем)
Справедливости ради, стоит отметить, что двигатель стиральной машины LG с прямым приводом не идеально бесшумный. В момент пуска двигателя, из-за взаимодействия магнитных полей статора с магнитами ротора, возникают колебания последнего, сопровождающиеся характерным металлическим звоном. По мере увеличения оборотов ротора, звук становится более мягким, но всё-равно своеобразным и характерным для всех стиральных машин LG с прямым приводом барабана.
➤ Adblockdetector