Бесколлекторные двигатели постоянного тока. Что это такое?

Этой статьёй я начинаю цикл публикаций о бесколлекторных двигателях постоянного тока. Доступным языком опишу общие сведения, устройство, алгоритмы управления бесколлекторным двигателем. Будут рассмотрены разные типы двигателей, приведены примеры подбора параметров регуляторов. Опишу устройство и алгоритм работы регулятора, методику выбора силовых ключей и основных параметров регулятора. Логическим завершением публикаций будет схема регулятора.
Бесколлекторные двигатели получили широкое распространение благодаря развитию электроники и, в том числе, благодаря появлению недорогих силовых транзисторных ключей. Также немаловажную роль сыграло появление мощных неодимовых магнитов.
Однако не стоит считать бесколлекторный двигатель новинкой. Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до 1962 года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Т.е. уже более полувека существуют различные серийные реализации этого типа электропривода!
Немного терминологии
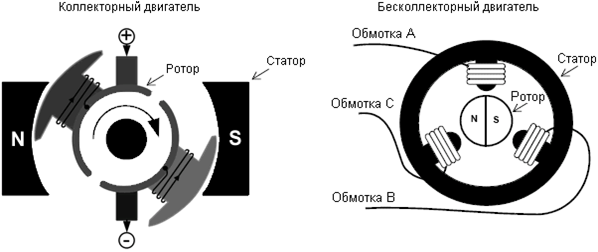
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе. Поэтому, далее в тексте ротор — магниты, статор — обмотки.
Для управления двигателем применяется электронный регулятор. В зарубежной литературе Speed Controller или ESC (Electronic speed control).
Что такое бесколлекторный двигатель?
Попробуем разобраться, что собой представляет бесколлекторный двигатель постоянного тока (Brushles Direct Current Motor). В самой этой фразе уже кроется ответ — это двигатель постоянного тока без коллектора. Функции коллектора выполняет электроника.
Преимущества и недостатки
Единственным недостатком считают сложный дорогостоящий электронный блок управления (регулятор или ESC). Однако, если вы хотите управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники — просто железка. Нет возможности подать на него напряжение и добиться нормального вращения как у других двигателей.
Что происходит в регуляторе бесколлекторного двигателя?
То же самое делает и электроника, управляющая бесколлекторным двигателем — в нужные моменты подключает постоянное напряжение на нужные обмотки статора.
Датчики положения, двигатели без датчиков
Существуют бесколлекторные двигатели, которые не имеют датчиков. В таких двигателях положение ротора определяется путем измерения напряжения на незадействованной в данный момент времени обмотке. Эти методы также будут рассмотрены позднее. Следует обратить внимание на существенный момент: этот способ актуален только при вращении двигателя. Когда двигатель не вращается или вращается очень медленно, такой метод не работает.
В каких случаях применяют бесколлекорные двигатели с датчиками, а в каких — без датчиков? В чем их отличие?
В тех случаях, когда конструктивно невозможно разместить датчики в корпусе двигателя, используют двигатели без датчиков. Конструктивно такие двигатели практически не отличаются от двигателей с датчиками. А вот электронный блок должен уметь управлять двигателем без датчиков. При этом блок управления должен соответствовать характеристикам конкретной модели двигателя.
Если двигатель должен стартовать с существенной нагрузкой на валу двигателя (электротранспорт, подъёмные механизмы и т.п.) — применяют двигатели с датчиками. Если двигатель стартует без нагрузки на валу (вентиляция, воздушный винт, применяется центробежная муфта сцепления и т.п.), можно применять двигатели без датчиков. Запомните: двигатель без датчиков положения должен стартовать без нагрузки на валу. Если это условие не соблюдается, следует использовать двигатель с датчиками. Кроме того, в момент старта двигателя без датчиков возможны вращательные колебания оси двигателя в разные стороны. Если это критично для Вашей системы, применяйте двигатель с датчиками.
Три фазы
Трехфазные бесколлекторные двигатели приобрели наибольшее распространение. Но они могут быть и одно, двух, трех и более фазными. Чем больше фаз, тем более плавное вращение магнитного поля, но и сложнее система управления двигателем. 3-х фазная система наиболее оптимальна по соотношению эффективность/сложность, поэтому и получила столь широкое распространение. Далее будет рассматриваться только трехфазная схема, как наиболее распространенная. Фактически фазы — это обмотки двигателя. Поэтому если сказать «трехобмоточный», думаю, это тоже будет правильно. Три обмотки соединяются по схеме «звезда» или «треугольник». Трехфазный бесколлекторный двигатель имеет три провода — выводы обмоток, см. рисунок.
Двигатели с датчиками имеют дополнительных 5 проводов (2-питание датчиков положения, и 3 сигналы от датчиков).
В трехфазной системе в каждый момент времени напряжение подается на две из трех обмоток. Таким образом, есть 6 вариантов подачи постоянного напряжения на обмотки двигателя, как показано на рисунке ниже.

Это позволяет создать вращающееся магнитное поле, которое будет проворачиваться «шагами» на 60 градусов при каждом переключении. Но не будем забегать наперед. В следующей статье будут рассмотрены устройство бесколлекторного двигателя, варианты расположения магнитов, обмоток, датчиков и т.д., а позже будут рассмотрены алгоритмы управления бесколлекторными двигателями.
Бесколлекторные моторы «на пальцах» Что такое бесколлекторные моторы и как управлять бесколлекторными моторами:
«Бесколлекторные двигатели» ЛикБез и проектирование
Принцип работы электрического двигателя:
В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
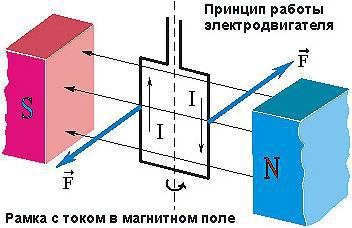
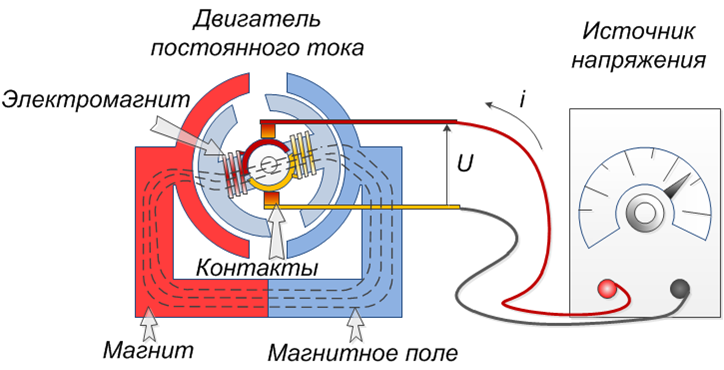
Устройство электрического двигателя:
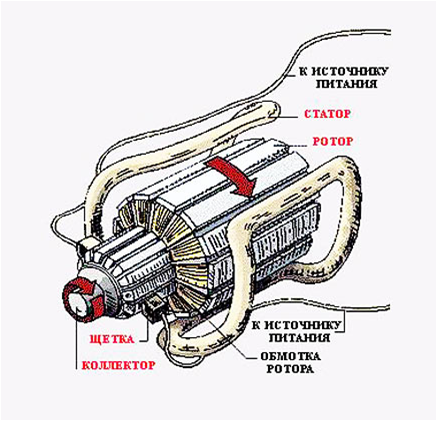
Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель — это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
Устройство бесколлекторного двигателя:
Inrunner (произносится как «инраннер»). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner (произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами. 
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.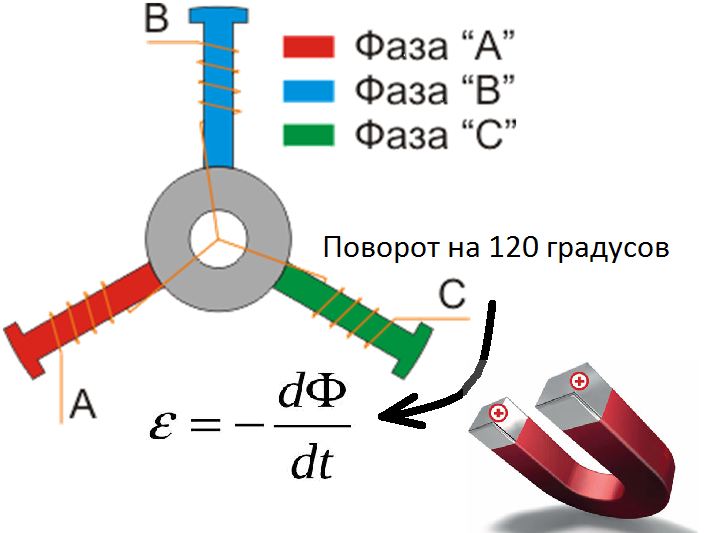
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток: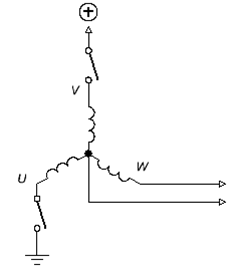
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):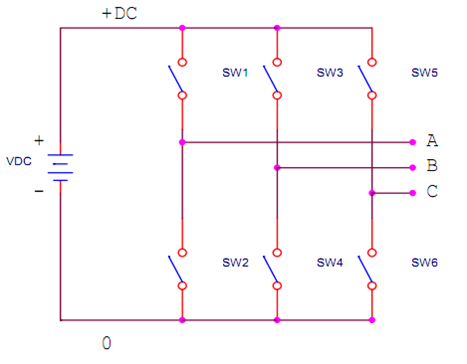
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).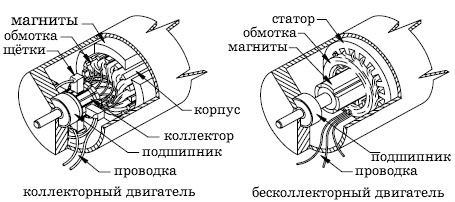
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки 🙂
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.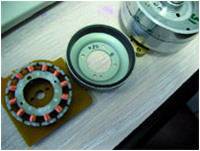
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм 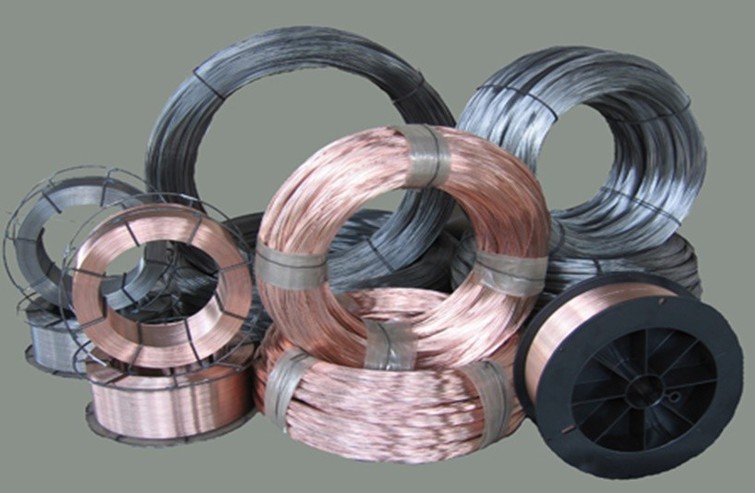
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение. 
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1.73 раз. (впоследствии было выбрано соединение треугольник) 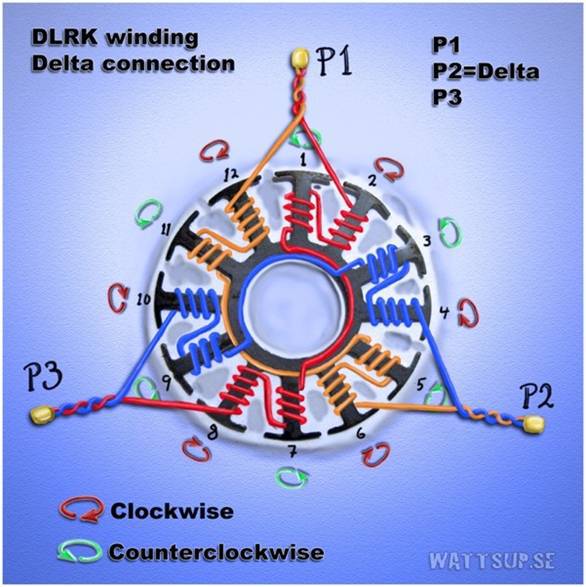
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея. 
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.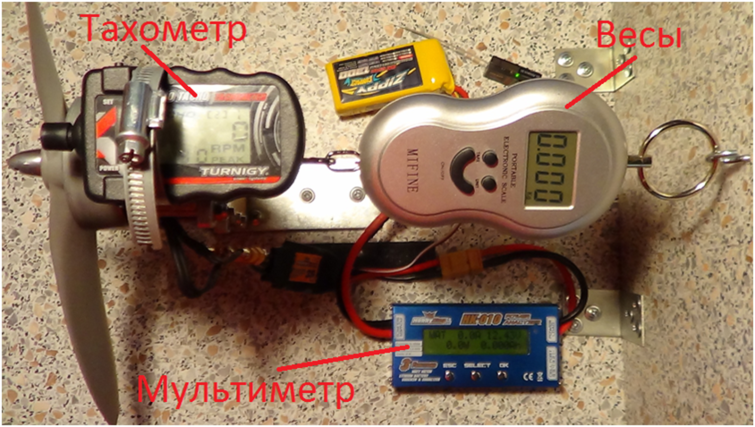
Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки: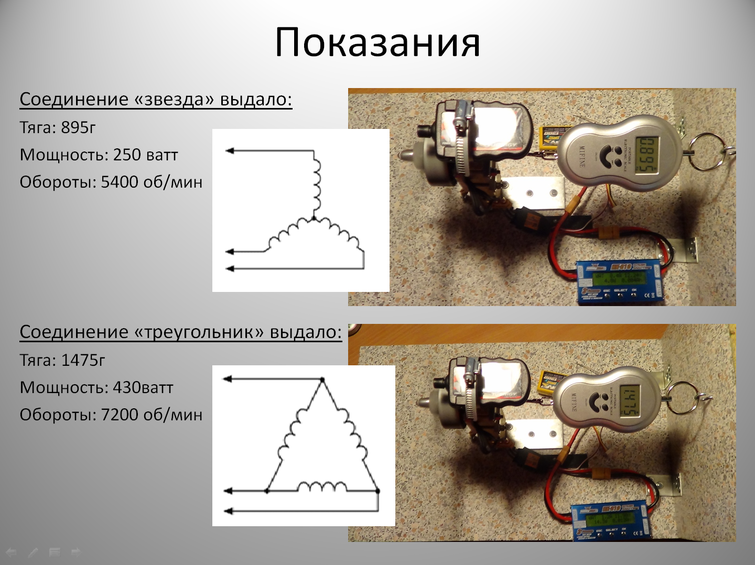
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм. 
Характеристики полученного двигателя:
Потребляемый ток: 34.1А
Ток холостого хода: 2.1А
Сопротивление обмоток: 0.02 Ом
Количество полюсов: 14
Обороты: 8400 об/мин
Видеоотчет испытания двигателя на самолете. Мягкой посадки 😀
Расчет КПД двигателя: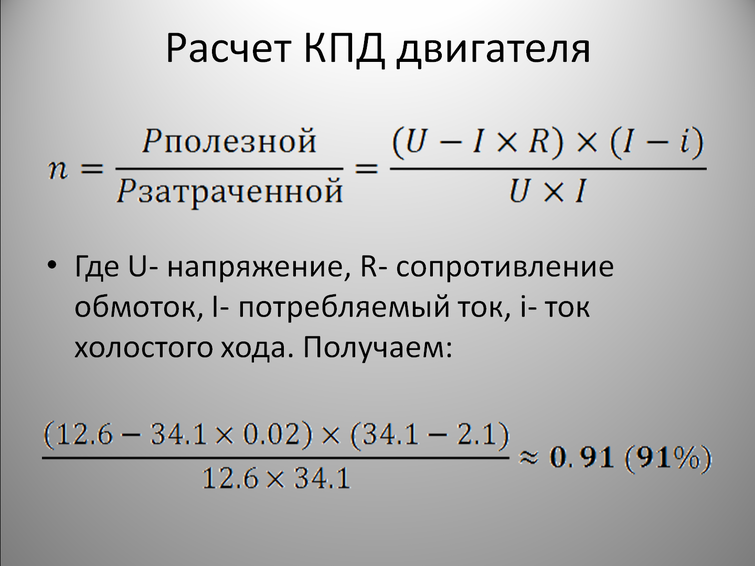
Очень хороший показатель. Хотя можно было еще выше добиться. 
Выводы:
1) У бесколлекторных двигателей высокая эффективность и КПД
2) Бесколлекторные двигатели компактны
3) Бесколлекторные двигатели можно использовать во взрывоопасных средах
4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи. Удачи всем)