Рулевое управление автомобиля
Одной из основных систем, обеспечивающих безопасность передвижения на автомобиле, является рулевое управление. Назначение рулевого управления автомобиля — возможность менять направление движения, совершать повороты и маневры при объезде препятствий или обгоне. Эта составляющая также важна, как и тормозная система. Доказательством тому является предписание ПДД, эксплуатация автомобиля с неисправными указанными механизмами категорически запрещена.
Особенности узла и конструкция
На автомобилях используется кинематический способ смены направления движения, подразумевающий, что осуществление поворота происходит за счет смены положения управляемых колес. Обычно управляемой является передняя ось, хотя существуют и авто с так называемой системой подруливания. Особенность работы в таких авто заключается в том, что колеса задней оси тоже поворачиваются при изменении направления, хоть и на меньший угол. Но пока эта система широкого распространения не получила.
Помимо кинематического способа на технике используется еще и силовой. Особенность его заключается в том, что для совершения поворота колеса одной стороны притормаживаются, в то время, как с другой стороны они продолжают двигаться с прежней скоростью. И хоть этот способ изменения направления на легковых авто распространения не получил, на них он все же используется, но в несколько ином качестве – как система курсовой устойчивости.
Этот узел автомобиля состоит из трех основных элементов:
- рулевая колонка;
- рулевой механизм;
- привод (система тяг и рычагов);
У каждой составляющей – своя задача.
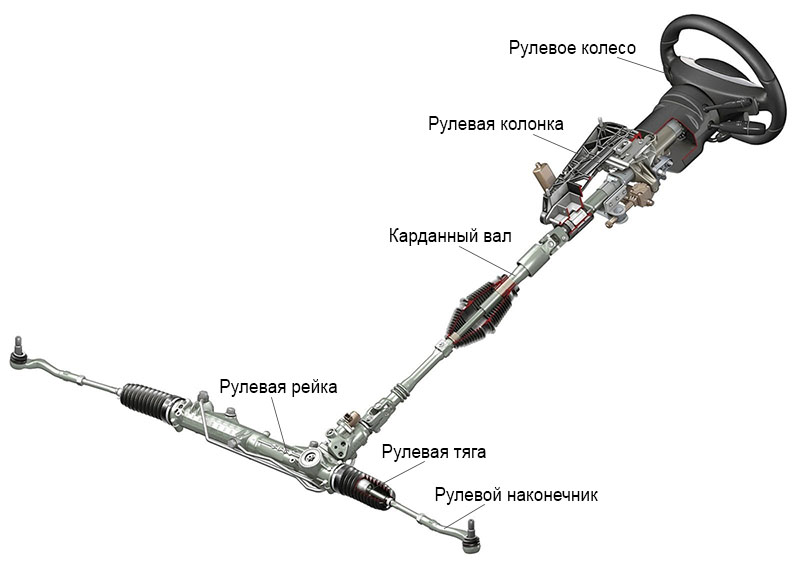
Рулевая колонка
Выполняет передачу вращательного усилия, которое создает водитель для изменения направления. Состоит она из рулевого колеса, располагаемого в салоне (на него и воздействует водитель, вращая его). Оно жестко посажено на вал колонки. В устройстве этой части рулевого управления очень часто используется вал, разделенный на несколько частей, соединенных между собой карданными шарнирами.
Такая конструкция сделана не просто так. Во-первых, это позволяет менять угол положения рулевого колеса относительно механизма, смещать его в определенную сторону, что нередко необходимо при компоновке составных частей авто. В дополнение такая конструкция позволяет повысить комфортабельность салона – водитель может менять положение рулевого колеса по вылету и наклону, обеспечивая максимально удобное его положение.
Во-вторых, составная рулевая колонка имеет свойство «ломаться» в случае ДТП, снижая вероятность травмирования водителя. Суть такова – при фронтальном ударе двигатель может сместиться назад и толкнуть рулевой механизм. Если бы вал колонки был цельным, изменение положения механизма привело бы к выходу вала с рулевым колесом в салон. В случае же со составной колонкой, перемещение механизма будет сопровождаться всего лишь изменением угла одной составляющей вала относительно второй, а сама колонка остается неподвижной.
Рулевой механизм
Предназначен для преобразования вращения вала рулевой колонки в поступательные движения элементов привода.
Наибольшее распространение на легковых автомобилях получили механизмы типа «шестерня-зубчатая рейка». Ранее же использовался еще один вид – «червяк-ролик», который сейчас в основном используется на грузовых авто. Еще один вариант для грузовиков – «винтовой».
«шестерня-рейка»
Распространение тип «шестерня-рейка» получил благодаря сравнительно простому устройству рулевого механизма. Состоит этот конструктивный узел из трех основных элементов – корпус, в котором размещается шестерня и перпендикулярно ей – рейка. Между двумя последними элементами имеется постоянное зубчатое зацепление.

Работает этот вид механизма так: шестерня жестко связана с рулевой колонкой, поэтому она вращается вместе с валом. Из-за зубчатого соединения вращение передается на рейку, которая при таком воздействии смещается внутри корпуса в ту или иную сторону. Если водитель вращает рулевое колесо влево, взаимодействие шестерни с рейкой приводит к тому, что последняя перемещается вправо.
Зачастую на авто применяются механизмы «шестерня-рейка» с фиксированным передаточным числом, то есть диапазон поворота рулевого колеса для изменения угла колес одинаков при всех их положениях. Для примера, предположим, что для поворота колес на угол 15° необходимо сделать 1 полный оборот руля. Так вот, неважно, в каком положении находятся управляемые колеса (крайнее, прямолинейное), для поворота на указанный угол придется сделать 1 оборот.
Но некоторые автопроизводители устанавливают на свои авто механизмы с меняющимся передаточным числом. Причем достигается это достаточно просто – изменением угла положения зубьев на рейке в определенных зонах. Эффект от этой доработки механизма такой: если колеса стоят прямо, то для изменения их положения на те же 15° (пример) требуется 1 оборот. Но если они находятся в крайнем положении, то из-за измененного передаточного числа, колеса повернуться на указанный угол уже через пол-оборота. В результате диапазон поворота руля «от края до края» значительно меньше, чем в механизме с фиксированным передаточным числом.

Рейка с переменным передаточным числом
Помимо простоты устройства тип «шестерня-рейка» используется еще потому, что в такой конструкции возможна реализация исполнительных механизмов гидроусилителя (ГУР) и электроусилителя (ЭУР), а также электрогидравлического (ЭГУР).
«червяк-ролик»
Следующий тип – «червяк-ролик», менее распространен и на легковых авто сейчас практически не используется, хотя его можно встретить на автомобилях ВАЗ классического семейства.
В основе этого механизма положена червячная передача. Представляет червяк собой винт с резьбой особого профиля. Этот винт располагается на валу, соединенном с рулевой колонкой.
С резьбой этого червяка контактирует ролик, соединенный с валом, на который посажена сошка – рычаг, взаимодействующий с элементами привода.

Червячный рулевой механизм
Суть работы механизма такова: при вращении вала, винт вращается, что приводит к продольному перемещению ролика по его резьбе. А поскольку ролик установлен на валу, то это смещение сопровождается поворотом последнего вокруг своей оси. Это в свою очередь приводит к полукруговому движению сошки, которая и воздействует на привод.
От механизма типа «червяк-ролик» на легковых авто отказались в пользу «шестерни-рейки» из-за невозможности интегрировать в него гидроусилитель (на грузовых авто он все же имелся, но исполнительный механизм был вынесенным), а также достаточно сложной конструкции привода.
Винтовой тип
Конструкция винтового механизма – еще сложнее. В ней также имеется винт с резьбой, но контактирует он не с роликом, а со специальной гайкой, на внешней стороне которой нанесен зубчатый сектор, взаимодействующий с таким же, но сделанным на валу сошки. Также существуют механизмы с промежуточными роликами между гайкой и зубчатым сектором. Принцип же действия такого механизма практически идентичен червячному – в результате взаимодействия вал проворачивается и тянет сошку, а та в свою очередь – привод.
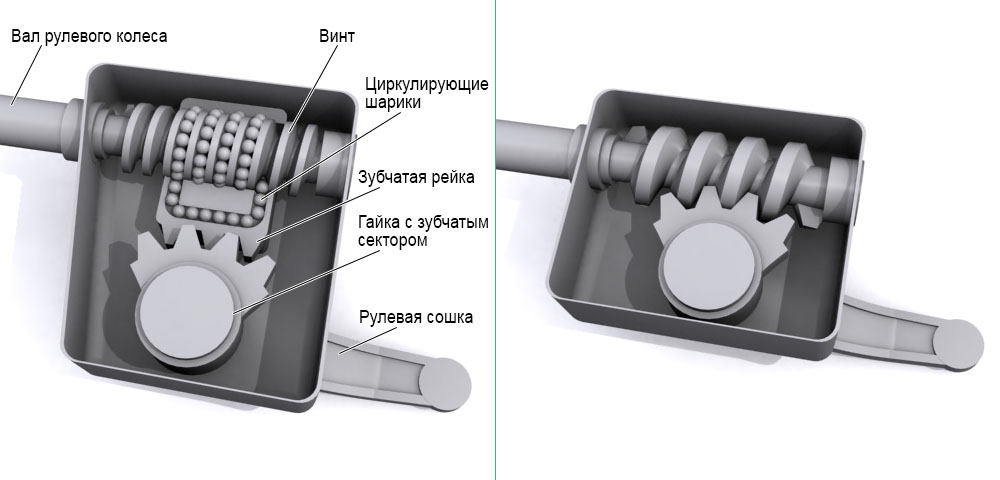
Винтовой рулевой механизм
На винтовой механизм можно установить гидроусилитель (гайка выполняет роль поршня), но на легковых авто он не применяется из-за массивности конструкции, поэтому и используется он только на грузовиках.
Привод
Привод в конструкции рулевого управления используется для передачи перемещения рейки или сошки на управляемые колеса. Причем в задачу этой составляющей входит изменение положения колес на разные углы. Обусловлено это тем, что колеса при повороте движутся по разным радиусам. Поэтому колесо с внутренней стороны при изменении траектории движения должно поворачиваться на больший угол, чем внешнее.
Конструкция привода зависит от используемого механизма. Так, если на авто используется «шестерня-рейка», то привод состоит всего лишь из двух тяг, соединенных с поворотным кулаком (роль которого выполняет амортизационная стойка) посредством шарового наконечника.
К рейке эти тяги могут крепиться двумя способами. Менее распространенным является жесткая фиксация их болтовым соединением (в некоторых случаях соединение осуществляется через сайлент-блок). Для такого соединения в корпусе механизма проделано продольное окно.
Более распространенный метод соединения тяг – жесткое, но подвижное соединение с концами рейки. Для обеспечения такого соединения на конце обеих тяг сделан шариковый наконечник. Посредством гайки этот шар прижимается к рейке. При передвижении последней тяга меняет свое положение, что и обеспечивает имеющееся соединение.

В приводах, где используется механизм «червяк-ролик», конструкция значительно сложнее и представляет собой целую систему рычагов и тяг, получивших называние рулевой трапеции. Так, к примеру, на ВАЗ-2101 привод состоит из двух боковых тяг, одной средней, маятникового рычага и поворотных кулаков с рычагами. При этом для обеспечения возможности изменения угла положения колеса поворотный кулак крепиться к рычагам подвески при помощи двух шаровых опор (верхней и нижней).
Большое количество составных элементов, а также соединений между ними делает такой тип привода более подверженным износу и возникновению люфтов. Этот факт — еще одна причина отказа от червячного механизма в пользу реечного.
«Обратная связь»
Стоит отметить, что в рулевом механизме существует еще и так называемая «обратная связь». Водитель не только воздействует на колеса, а посредством ее же получает информацию об особенностях движения колес по дороге. Проявляется это в виде вибраций, рывков, создания определенно направленных усилий на руле. Эта информация считается очень важной для правильной оценки поведения авто. Доказательством тому является тот факт, что в авто, оснащаемых ГУР и ЭУР, конструкторы сохранили «обратную связь».
Передовые разработки
Этот узел продолжают совершенствовать, так самыми последними достижениями являются системы:
- Активного (динамического) рулевого управления. Она позволяет изменять передаточное число механизма в зависимости от скорости автомобиля. Также выполняет и дополнительную функцию – корректировка угла передних колес в поворотах и при торможении на скользкой дороге.
- Адаптивного рулевого управления (управление по проводам). Это самая новая и перспективная система. В ней отсутствует прямая связь между рулем и колесами, всё работает за счёт датчиков и исполнительных устройств (сервоприводов). Большое распространение система ещё не получила по причине психологического и экономического факторов.

Система «рули по проводам»
Заключение
В целом механизм является достаточно надежным узлом, не требующим никакого обслуживания. Но при этом эксплуатация рулевого управления автомобиля подразумевает проведение своевременной диагностики для выявления неисправностей.
Конструкция этого узла состоит из множества элементов с подвижными соединениями. А где такие соединения есть, со временем из-за износа контактирующих элементов, в них появляются люфты, которые в значительной мере могут повлиять на управляемость авто.
Сложность диагностики рулевого управления зависит от его конструктивного исполнения. Так в узлах с механизмом «шестерня-рейка» соединений, которые необходимо проверять не так уж и много: наконечники, зацепление шестерни с рейкой, карданы рулевой колонки.
А вот с червячным механизмом из-за сложной конструкции привода точек диагностики значительно больше.
Что касается ремонтных работ при нарушении работоспособности узла, то наконечники при сильном износе просто заменяются. В рулевом механизме на начальном этапе люфт удается убрать регулировкой зацепления, а если это не помогло – переборкой узла с использованием ремкомплектов. Карданы колонки, как и наконечники – просто заменяются.
Классификация рулевых управлений и требования к ним
Рулевое управление предназначено для изменения направления движения автомобиля.
Рулевые управления колесных машин подразделяются по следующим основным классификационным признакам:
по способу поворота:
- управляемыми колесами
- управляемой осью
- складыванием звеньев
- бортовым поворотом (принудительным вращением ведущих колес одного борта с иной угловой скоростью, чем ведущих колес другого борта)
расположению места водителя:
- правое — при левостороннем движении
- левое — при правостороннем движении
Кроме того, для получившего наибольшее применение на автомобилях рулевого управления с управляемыми колесами (оно состоит из рулевого колеса, рулевого механизма, рулевого привода, а также часто и усилителя) выделяют классификацию рулевых механизмов и рулевых приводов.
Классификация рулевых механизмов:
по типу передачи:
- механический
- гидравлический (рулевой механизм или рулевое управление)
- изменяемое
- неизменяемое
- обратимости
- обратимый
- на пределе обратимости
Классификация рулевых приводов (рулевых трапеций):
- передняя — перед осью
- задняя — за осью
в зависимости от типа подвески:
- цельная (при зависимой подвеске)
- разрезная (при независимой подвеске)

Рис. Схемы типовых способов поворота колесных машин:
а, б — управляемыми колесами; в — управляемой осью; г — складыванием звеньев; д — бортовой поворот; 0ш — ось шкворня; Оип — центр поворота. Оим — центр масс
Основные требования к рулевому управлению следующие:
- обеспечение высокой маневренности автомобиля;
- удобство и легкость управления, в том числе минимальная передача толчков ог дороги на рулевое колесо;
- соответствие радиуса поворота управляющему воздействию водителя;
- высокая надежность;
- минимальное боковое скольжение колес при повороте автомобиля;
- стабилизация повернутых управляемых колес;
- минимальные вибрации, в том числе отсутствие автоколебаний управляемых колес;
- кинематическая согласованность с подвеской.
Кроме того, к рулевым управлениям, как и к остальным механизмам и системам автомобиля, предъявляют также общие требования:
- обеспечение минимальных размеров и массы, высокая надежность (здесь она выделена отдельным пунктом, поскольку из механизмов и систем автомобиля рулевое управление и тормозное управление прежде всего влияют на безопасность движения);
- минимальное обслуживание;
- технологичность.
Рассмотрим, какими конструктивными мероприятиями обеспечивается выполнение требований к рулевым управлениям с управляемыми колесами.
Высокая маневренность (малый радиус поворота и малая ширина коридора) обеспечивается в основном уменьшением базы и увеличением угла поворота управляемых колес. Обычно минимальный радиус поворота легковых автомобилей составляет 4,5… 5,5 м, грузовых — 8… 12 м. Маневренность существенно улучшается, если, кроме передних управляемых колес, используются сше и задние управляемые колеса.
Удобство и легкость управления, как и для любого органа управления, определяются обычно удобным расположением органа управления (рулевого колеса), величиной его полного хода (который не должен превышать 5 оборотов от одного до другого крайнего положения), невысокими значениями усилия, необходимого для перемещения рулевого колеса. Обычно считается, что его усилие не должно превышать 100 Н для легковых автомобилей и 250 Н для грузовых. Удобство расположения определяется в частности соответствием расположения плоскости рулевого колеса посадке водителя.
Соответствие радиуса поворота управляющему воздействию водителя обеспечивается в основном использованием жесткой кинематической связи между управляемыми колесами и рулевым колесом. Кроме того, суммарный люфт рулевого колеса должен находиться в заданных минимальных значениях. При этом управляющее воздействие водителя не должно вызывать боковых скольжений управляемых и неуправляемых колес.
Высокая надежность рулевого управления обеспечивается в основном достаточно большими запасами по напряжениям в деталях рулевого управления. Применение дублирующих систем в рулевом управлении, как и в тормозном управлении, пока не представляется возможным.
Минимальное боковое скольжение колес при повороте автомобиля обеспечивается в основном применением рулевых трапеций в приводе управляемых колес, а при трех и более осях, кроме того, расположением осей, обеспечивающим минимальное боковое скольжение. Меньшая высота профиля и более широкий протектор шины уменьшают углы увода наружных колес при движении на повороте.
Стабилизация повернутых управляемых колес обеспечивается в основном при малых скоростях движения применением поперечного наклона оси шкворня, а при больших скоростях движения — упругостью шин и продольным наклоном оси шкворня.