Схема пуска двигателя постоянного тока независимого возбуждения в функции времени

Схема пуска двигателя постоянного тока НВ в функции времени построена на применении реле времени, которые по истечению выдержки времени поэтапно выводят ступени пускового резистора.
Перед изучением принципа работы схемы — рекомендуется ознакомиться с данным материалом.


Принцип работы схемы
Пуск двигателя постоянного тока независимого возбуждения (ДПТ НВ) осуществляется с полностью ведённым резистором в цепи якоря. После включения автоматического выключателя QF1 напряжение поступает на обмотку возбуждения LM, катушку реле КА и катушку реле времени КТ1.

Что приводит к их срабатыванию. Контакт КТ1 размыкается в цепи катушки контактора КМ2, а контакт КА замыкается в цепи КМ1.

Реле минимального тока КА служит для защиты двигателя. При возникновении обрыва в цепи возбуждения — реле отпускает контакт КА и обесточивает цепь якоря ДПТ через КМ1.
После нажатия кнопки “Пуск” SB1, запитывается магнитный пускатель КМ1, который своими контактами:
- КМ1.2 — шунтирует кнопку “Пуск” (позволяет не удерживать кнопку SB1 в нажатом положении)
- КМ1.1 запитывает цепь якоря — двигатель запускается с двумя ступенями реостата, так как контакторы КМ2 и КМ3 питания не получают.
- КМ1.3 обесточивает реле времени КТ1.

После выдержки времени КТ1 замыкает свой контакт в цепи катушки контактора КМ2.

КМ2 срабатывает и замыкает свои контакты:
- КМ2.1 — шунтируя первую ступень резистора (Двигатель разгоняется по искусственной механической характеристике 2);
- КМ2.2 — запитывая реле времени КТ2.

Реле времени КТ2 срабатывает после выдержки времени, и замыкает цепь питания катушки контактора КМ3.

КМ3 срабатывая шунтирует вторую ступень резистора и двигатель выходит на естественную характеристику 3. Пуск окончен.

Останов двигателя осуществляется нажатием кнопки «стоп» SB2.
К достоинствам схемы можно отнести простоту управления, стабильность процесса разгона и торможения, отсутствие задержки электропривода на промежуточных скоростях.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ)
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид

где: n — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).

Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0 ).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:

где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.


На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам
Схема пуска двигателя постоянного тока независимого возбуждения в функции ЭДС
Рассмотрим схему пуска двигателя постоянного тока независимого возбуждения в функции ЭДС (скорости)
При данной схеме скорость вращения двигателя определяется косвенным путём, т.е. изменением ЭДС в цепи якоря, значение которой увеличивается с ростом угловой скорости двигателя. 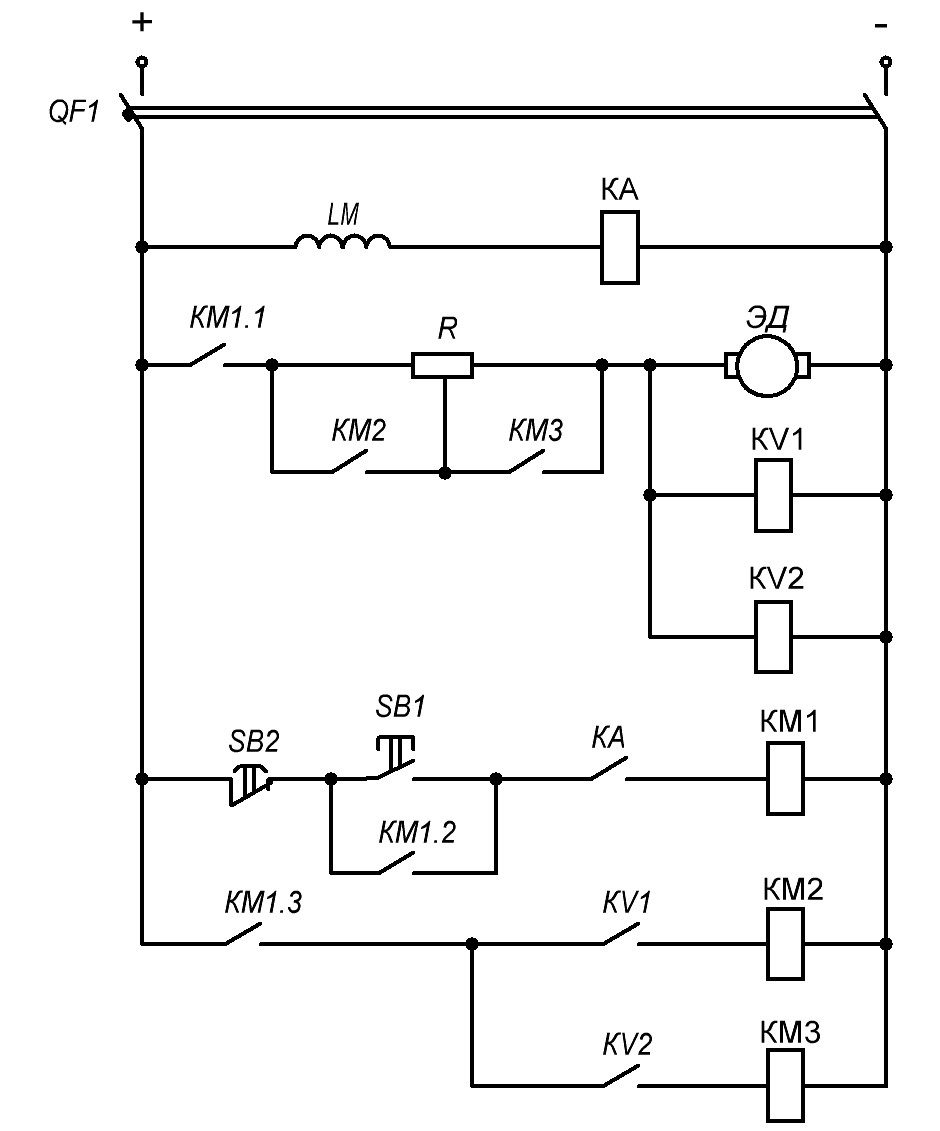
Управление в функции ЭДС (или скорости) реализовано при помощи реле напряжения KV, которые настроены на срабатывания при различных значениях ЭДС в цепи якоря.
Перед изучением принципа работы схемы — рекомендуется ознакомиться с данным материалом.
Принцип работы схемы
Включением автоматического выключателя QF1, напряжение поступает на обмотку возбуждения LM двигателя и катушку КА, которое замыкает свой контакт КА. Реле минимального тока КА служит для защиты двигателя от обрыва в цепи возбуждения.
 После нажатия кнопки “Пуск” SB1, запитывается магнитный пускатель КМ1, который замыкает контакты:
После нажатия кнопки “Пуск” SB1, запитывается магнитный пускатель КМ1, который замыкает контакты:
- КМ1.2 — шунтирует кнопку “Пуск” (позволяет не удерживать кнопку SB1 в нажатом положении)
- КМ1.1 в цепи якоря — двигатель запускается с включенными в цепь якоря двумя ступенями реостата, так как контакторы КМ2 и КМ3 питания не получают.
- КМ1.3 в цепи питания катушки магнитных пускателей КМ2 и КМ3, контакты которых остаются в исходном положении до срабатывания реле KV1 и KV2.
Двигатель разгоняется по искусственной характеристике 1.
С ростом скорости растет и ЭДС в цепи якоря, и напряжение на катушках реле KV1, KV2. При скорости ω1 (равной n1) срабатывает реле KV1 которое замыкает контакт KV1 после чего на катушку КМ2 подаётся напряжение. КМ2 в свою очередь шунтирует своим контактом KM2 первую ступень реостата.
Дальнейший разгон двигателя происходит по искусственной характеристике 2. При достижении скорости ω2 (равной n2) ЭДС в цепи якоря достигает значения достаточного для срабатывания реле KV2.
Реле напряжения KV2 замыкает контакт KV2, что приводит к срабатыванию КM3 и шунтированию второй ступени реостата контактом КM3.
Двигатель выходит на естественную механическую характеристику 3 по которой достигает своей номинальной скорости вращения. Пуск двигателя постоянного тока независимого возбуждения (ДПТ НВ) в функции ЭДС окончен.
Схемы пуска двигателя постоянного тока независимого возбуждения с резистором
Пуск с непосредственном включении двигателя постоянного тока в сеть возможен только для маломощных двигателей (до 1 кВт), при условии отсутствия нагрузки на валу. Для более мощных двигателей — данный способ пуска недопустим.
Содержание
Пусковой ток двигателя постоянного тока
При непосредственном включении двигателя постоянного тока в сеть — начальный пусковой ток может достигать опасных значений, способных вывести из строя сам двигатель.
Пусковой ток определяется по формуле:
- Iа – ток в цепи якоря
- U – напряжение питающей цепи
- Ea – противо ЭДС возникающая при движении якоря.
- Rа сопротивление обмотки якоря.
Так как в начальный момент пуска, якорь двигателя находится в неподвижном состоянии n = 0 об/мин – противоЭДС равна нулю Ea = 0.
Следовательно выражение (1) для начального момента пуска двигателя будет иметь вид:

Из выше указанного выражение следует, что при неподвижном якоре пусковой ток ограничивается лишь электрическим сопротивлением цепи якоря. Которое в нормальных машинах составляет Rа = 0,02 – 0,1 Ом. Поэтому для ограничения пускового тока и предотвращения поломки двигателя, пуск мощных ДПТ НВ производят только с введённым пусковым резистором в цепи якоря. Который по мере разгона двигателя по ступеням выводится. После окончания пуска, резистор будет полностью зашунтирован, и двигатель перейдет работать на естественную механическую характеристику (рис. 1).
При пуске, двигатель разгоняется по искусственной характеристике 1 до частоты вращения n1, затем 2 до n2, а после полного шунтирования резистора — по естественной характеристике 3.
Подробный расчет пусковых резисторов (реостатов) приведён в данном материале.
Классификация схем пуска двигателя постоянного тока с пусковым резистором
В зависимости от способа определения момента шунтирования реостата, схемы управления ДПТ НВ можно подразделить:
Схема пуска ДПТ НВ в функции ЭДС (скорости) – момент шунтирования реостата определяется изменением ЭДС в цепи якоря, значение которой увеличивается с ростом частоты вращения двигателя. При достижении частоты n1 и n2 происходит шунтирование реостата.
Схема пуска ДПТ НВ в функции тока — момент шунтирования реостата определяется изменением тока в цепи якоря, значение которого уменьшается с ростом частоты вращения двигателя. При достижении частоты n1 и n2 пусковой ток уменьшается до I1 и I2 соответственно, происходит шунтирование реостата.
Схема пуска ДПТ НВ в функции времени – в данной схеме момент шунтирования реостата определяется выдержкой времени, на протяжении которой двигатель наберёт достаточную частоту вращения для безопасного переключения.