Строительные, специальные и дорожные машины
Каждый экскаватор, автогрейдер, погрузчик, бульдозер, скрепер, рыхлитель, снегоочиститель, каток имеет набор документации, которая позволяет помочь в выполнении ремонта силами своего собственного коллектива. В случае если документация утеряна, то наш каталог дает возможность вам скачать чертежи различной строительной техники, которая наиболее распространена на стройплощадках нашей страны. В частности уже сегодня вы можете скачать чертежи Бульдозера ДЭТ-250, Автогрейдера ДЗ-122А, погрузчика ЛК-1, трактора МТЗ-82 и других моделей. Эти чертежи вы можете скачать прямо сейчас. В случае же если у нас нет необходимого чертежа, то вы можете быть уверены в том, что он появится, так как коллекция чертежей постоянно пополняется. В случае если у вас есть какие-то чертежи строительной техники, то мы их с радостью разместим на нашем сайте.




Основные программы для работы
с чертежами, опубликованными на сайте:
• КОМПАС-3D • AutoCAD
• SolidWorks • T-FLEX CAD

Софт: КОМПАС-3D 16.2
Состав: Технологическая карта (ТК), Вил общий экскаватора (ВО), ПЗ.

Софт: Solid Edge ST9
Состав: 3D сборка

Софт: КОМПАС-3D 16.1
Состав: 3D Сборка, 3D модели деталей, Сборочный чертеж (СБ), деталировка (Диск верхний, диск средний, диск нижний), PDF.

Софт: КОМПАС-3D 19.1
Состав: Сборочный чертеж, деталировка, 3D модель

Софт: КОМПАС-3D 17
Состав: Рабочее оборудование (СБ), Лотковая щетка (СБ), спецификация , ПЗ

Софт: КОМПАС-3D 17
Состав: ПЗ, Траншеекопатель роторный (ВО), Ротор (ВО), Конвейер (ВО), Схема кинематическая принципиальная

Софт: КОМПАС-3D 15.2
Состав: Сборочный чертеж, Деталировка (грани конуса, крышка, соединительный фланец), 3D-модель.

Софт: КОМПАС-3D V16
Состав: Снегоочиститель на базе КАМАЗ(ВО), Рабочий орган (СБ), Технология выполнения работ, спецификации 2 шт(ВО и СБ), ПЗ

Софт: КОМПАС-3D 16
Состав: 3D сборка и детали, STEP

Софт: КОМПАС-3D 16
Состав: 3Д модель (сборка и деталировка), чертежи (СБ, СП и деталировка), развёртка DXF и STEP файлы (для других САПР).

Софт: КОМПАС-3D V16
Состав: Стрела с ГОСТами на сварку (СБ), спецификация, ПЗ

Софт: КОМПАС-3D V16
Состав: Схема завода(СБ), ЩЕковая дробилка(ВО), Деталировка(Стакан, эксцентриковый вал, крышка, крышка),Спецификация(СБ и ВО), ПЗ

Софт: КОМПАС-3D V16
Состав: Рукоять с ГОСТами на сварку (СБ), спецификация, ПЗ

Софт: КОМПАС-3D V16
Состав: Схема завода(СБ), Конусная дробилка (ВО), Деталировка (Втулка, втулка, кольцо опорное, крышка), Спецификация, Спецификация, ПЗ

Софт: КОМПАС-3D 13
Состав: Бульдозер (ВО), Спецификация к Бульдозеру, Рабочее оборудование (СБ), Спецификация к рабочему оборудованию, Сооружение полки, Профиль отвала, Схема полки, Деталировка (гильза и шестерня гидронасоса), 3D-модели гильзы и шестерни, ПЗ

Софт: SolidWorks 2011
Состав: 3D сборка, dwg файлы для резки

Софт: КОМПАС-3D V16
Состав: 3D сборка , модели

Софт: AutoCAD 13
Состав: 3D модель одной деталью

Софт: SolidWorks 2020
Состав: Сборочные чертежи со спецификациями, деталировка, 3Д модель

Софт: КОМПАС-3D 18
Состав: Бетононасос (СБ), Технологическая схема (на формат положена растровая картинка) (ТС), Гидравлическая схема (ГС), Механизм передвижения (СБ), Результаты патентного поиска, Спецификации
Принципиальные схемы строительных машин
В основу конструкции погрузочных машин верхнего захвата положен принцип работы гребковых скреперов (нагребание и волочение), с успехом применяемых в промышленности при доставке наиболее тяжелых и крупнокусковых пород и руд.
Погрузочные машины верхнего захвата в настоящее время имеют ограниченное распространение. Предшественниками этих машин были так называемые скреперные погрузчики, имевшие рабочий орган в виде массивного гребка (скрепера), осуществлявшего не только захват, но и перемещение насыпного груза к месту его перегрузки. С 1930 г. появляются погрузочные машины, у которых гибкая связь между приводом и рабочим органом была заменена жесткой связью, т. е. рабочий орган стал неотделимым от машины при работе. Машины с такими гребковыми рабочими органами сохраняют значение и в настоящее время.
Машины периодического действия
Рекламные предложения на основе ваших интересов:
Институтом Гипроникель изготовлены в 1960 г. опытные образцы погрузочных машин периодического действия с рабочим органом гребкового типа: ПМС -1 на рельсовом ходу и Г1МС-2 на гусеничном ходу. Машины предназначены для погрузки горных пород, крепостью до 18 (по шкале проф. Протодьяконова) с максимальной крупностью кусков до 500 мм при проходке горизонтальных горных выработок сечением не менее 6 м2 (машина ПМС -1) и при работе в подземных камерах (машина ПМС -2).
Рабочим органом этих машин является загрузочная рукоять с гребком, с помощью которого производится нагребание породы на приемный лоток с последующим сбросом на приемный конвейер. Движение рукояти с гребком осуществляется двумя гидроцилиндрами через шарнирный параллелограмм. Рабочий орган с приемной плитой имеет общую точку качания в вертикальной плоскости и поворота в горизонтальной плоскости. С приемного конвейера насыпной груз поступает на перегрузочный конвейер и далее в вагонетки. Перегрузочный конвейер имеет возможность перемещаться в вертикальной и Горизонтальной плоскостях с помощью гидроцилиндров.
Обе машины имеют однотипную конструкцию всех основных узлов за исключением ходовой части.
Колесно-рельсовый ход машины ПМС -1 имеет две ведущих оси, которые приводятся в движение от электродвигателя через систему зубчатых передач. Путем перестановки сменных втулок достигается изменение колеи с 600 на 750 мм. Для придания машине достаточной устойчивости во время работы к раме ходовой части прикреплены четыре захвата за головки рельсов.
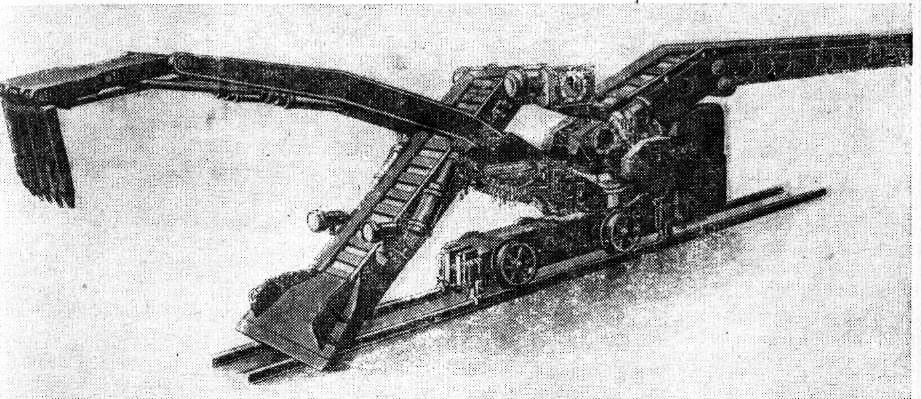
Рис. 1. Погрузочная машина ПМС -1.
Гусеничный ход машины ПМС -2 имеет независимый привод на каждую гусеницу. Тележка состоит из гусеничной цепи (конструктивно заимствованной от тягача ATJI ), семи опорных катков, ленивцев, буферного устройства, натяжного устройства, поддерживающего ролика и рамы. Трансмиссия совместно с установленным на ней гидромотором и распределительным устройством гидросистемы обеспечивает движение машины вперед и назад, поворот и торможение.
Гидросистема машин типа ПМС обеспечивает работу привода рабочего органа и ходовой части, подъем и опускание приемного и передаточного конвейера, поворот рабочего органа и приемного конвейера, а также натяжение гусениц. Управление гидроприводом двухстороннее ручное.
Питание электроэнергией осуществляется через гибкий кабель от сети трехфазного тока напряжением 380 в. Основное электрооборудование машин состоит из электродвигателя гидросистемы, электродвигателя ходовой части, двух электродвигателей передаточного конвейера и двух электродвигателей приемного конвейера. Освещение рабочего места осуществляется фарами, установленными на машине. Кроме основного имеется ремонтное освещение напряжением 36 в.
Обе машины прошли заводские испытания и в 1961 г. испытываются на подземной погрузке руды.
Работы по созданию опытной гребковой погрузочной машины для погрузки доломита проводятся в Харьковском горном институте под руководством д-ра техн. наук А. А. Соловьева. Машина имеет неавтоматизированный цикл движения гребка. Шарнир рукояти гребка закреплен на бесконечной цепи, огибающей две звездочки. При ходе машины к штабелю гребок автоматически забрасывается на штабель (откос) и происходит захват насыпного груза. Проектирование подобной машины для применения на предприятиях угольной промышленности в содружестве с Харьковским горным институтом начато также на заводе «Свет шахтера».
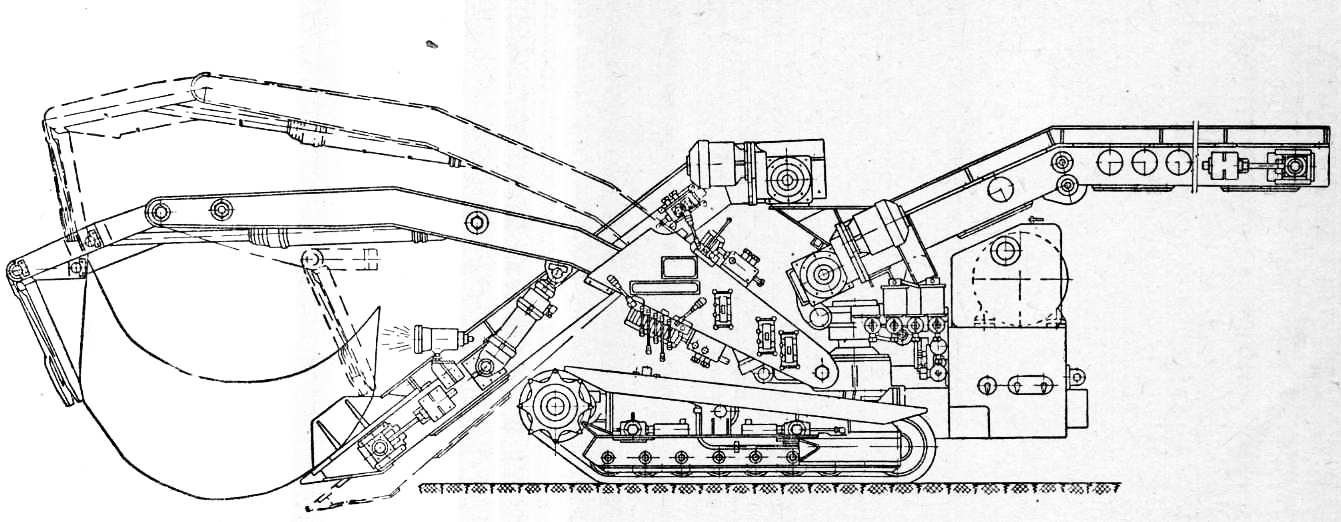
Рис. 2. Погрузочная машина ПМС -2.
Из зарубежных погрузочных машин периодического действия с верхним захватом распространение получили гребковые машины фирмы Вестфалия-Люнен ( ФРГ ). В 1954 г. фирма разработала модель машины ZL-20 на гусеничном ходу. Машина имеет гидравлический привод. Небольшая высота машины выгодно отличает ее от предыдущих моделей и расширяет область применения. Машина ZL-64, выпущенная в 1958 г., также имеет гусеничный ход, который по желанию заказчика может быть заменен рельсовым. Привод насосов гидравлической системы осуществляется от дизельного или электрического двигателя. Передаточный конвейер может поворачиваться в обе стороны на угол 35° в горизонтальной и на 25° в вертикальной плоскости. Мощная машина последнего выпуска ZL-101 производительностью 150 м3/час имеет гидравлический привод от двух поршневых гидронасосов с дизельными или электрическими двигателями. Передаточный конвейер имеет аналогичные с машиной ZL-64 углы поворота в горизонтальной и вертикальной плоскостях.
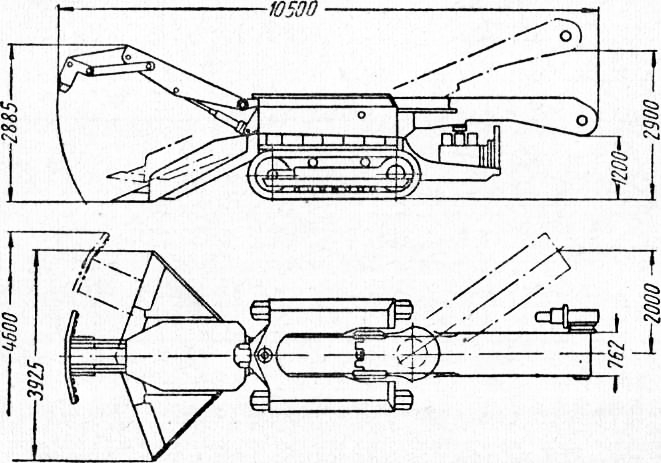
Рис. 3. Погрузочная машина Вестфалия-Люнен ZL-101.
Погрузочные машины фирмы Вестфалия-Люнен имеют ряд недостатков: работоспособность и производительность рабочего органа этих машин снижается с увеличением кусковатости и крепости насыпного груза; наличие шарниров и длинных тяг делает эти машины чувствительными к неполадкам.
К достоинствам машин следует отнести наличие гидравлического привода, обеспечивающего надежную и бесшумную работу механизмов, а также высокие рабочие усилия внедрения и подачи рабочего органа.
Машины непрерывного действия
К первым образцам машин непрерывного действия с верхним захватом материала относится погрузочная машина Форстера, в которой гребок, жестко укрепленный на штанге, приводился в движение кривошипным механизмом. К этой же группе можно отнести также машину Джой-Сулливан, рабочий орган которой состоит из вращающейся штанги с мощными зубьями-клеваками, захватывающими кусковой уголь из штабеля (при одновременной подаче машины вперед) и подающими его на скребковый передаточный конвейер.
В силу ряда конструктивных недостатков первые гребковые машины непрерывного действия не получили распространения. Однако принципиальные преимущества верхнего захвата продолжали привлекать внимание исследователей и конструкторов.
В Советском Союзе в настоящее время ведется проектирование опытной партии гребково-роторных погрузочных машин типа Г1МГР-1, разработанных Институтом Гипроникель по схеме, предложенной В. С. Берсеневым (Ленинградский горный институт).
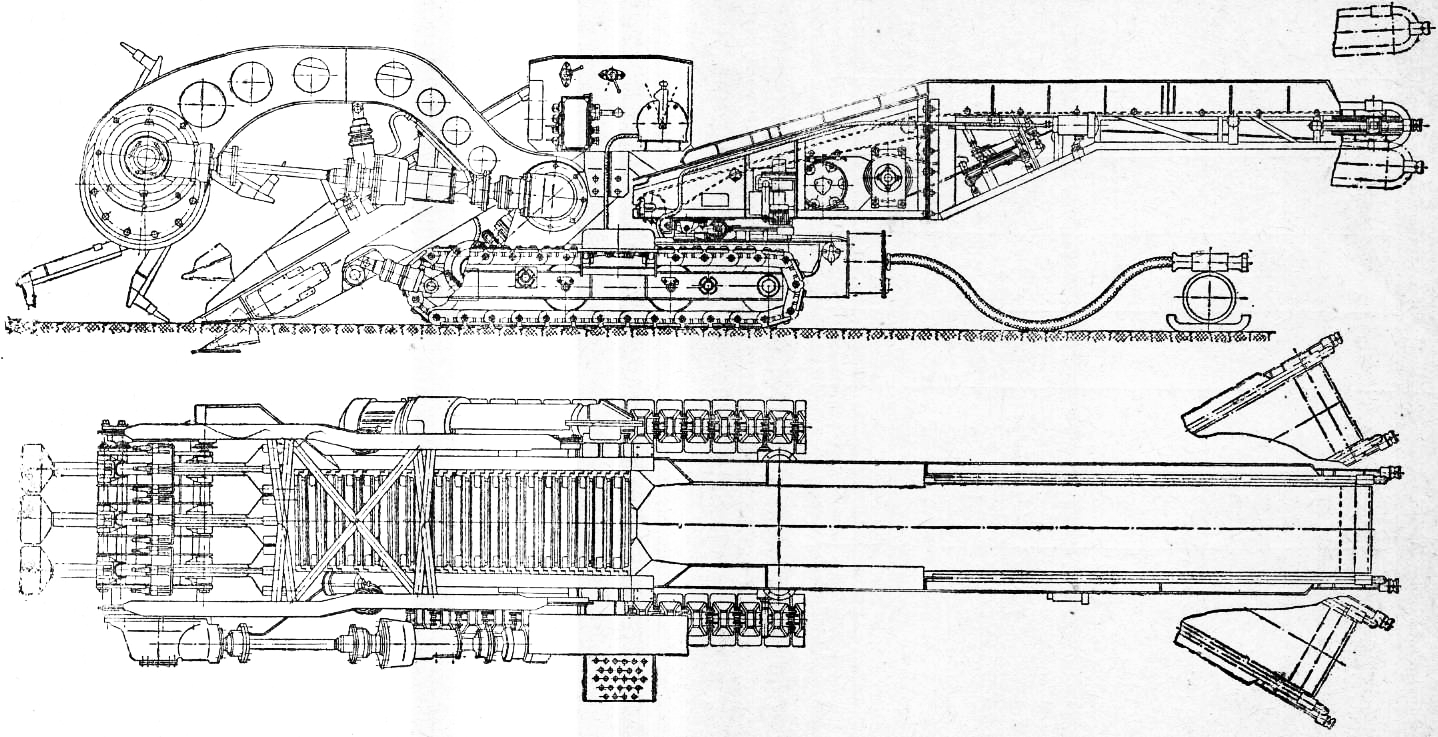
Рис. 4. Погрузочная машина ПМГР -1.
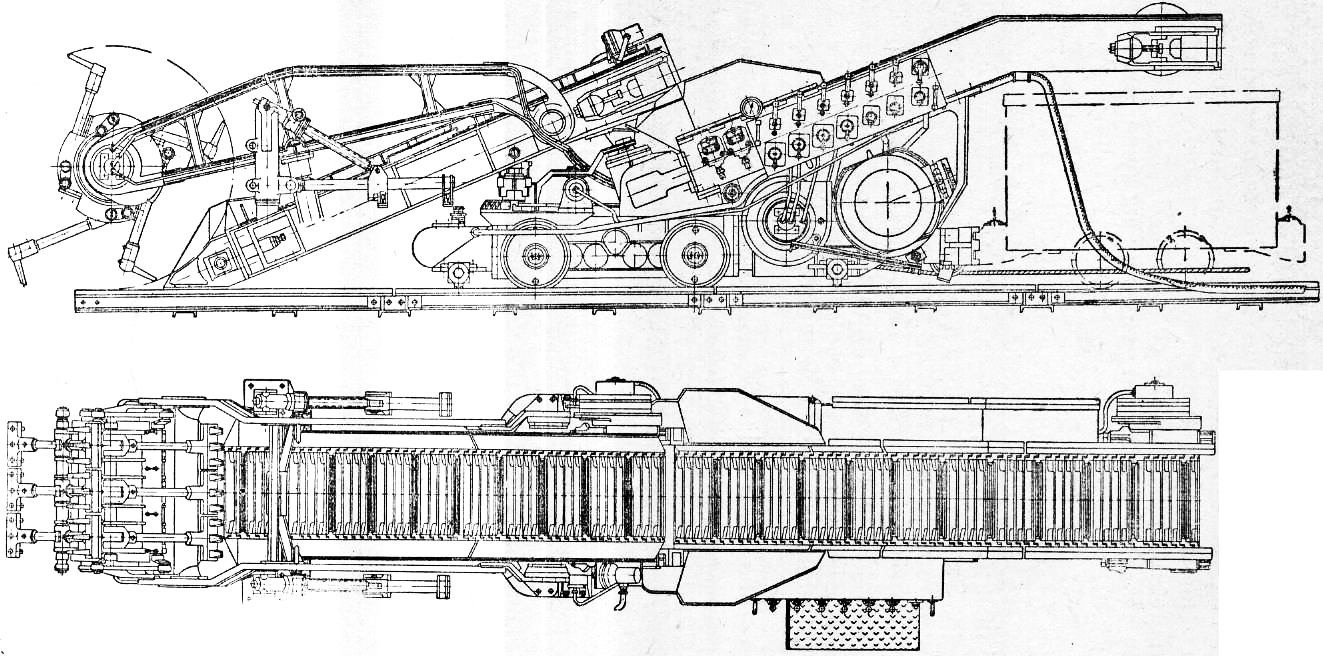
Рис. 5. Погрузочная машина ТПГР 1
Опытный образец машины прошел промышленные испытания в шахте при работе в очистной подземной камере, показав на погрузке рядовой горной массы с крупностью кусков до 500—600 мм среднюю производительность (с учетом времени на зачистку) 92 м3/час. Максимальная техническая производительность составила 124 м3/час, средняя эксплуатационная производительность с учетом времени маневров и простоев 43,5. м3/час. Общая потребляемая мощность при погрузке составила 17 кет.
Машина ПМГР -1 создана на базе углепогрузочной машины 0-5с, от которой заимствованы гусеничный ход и перегрузочный хвостовой конвейер. Рабочий орган машины представляет собой ротор, установленный на шарнирной раме-рукоятке, которая при захвате крупных кусков или работе на высоком штабеле может подниматься, поворачиваясь относительно горизонтальной оси подвески. Захват материала осуществляется гребками, подвешенными на роторе в четыре ряда. Отличительной особенностью этого рабочего органа является совмещение процессов внедрения и захвата материала гребками при непрерывности рабочего процесса. Отбор мощности к рабочему органу машины осуществлен от редуктора привода ходовой части через предохранительную муфту.
Машина типа ПМГР -1 предназначена для механизированной погрузки пород и руд крепостью до 18 (по шкале проф. Протодья-конова); она может работать при проведении горных выработок сечением от 7,0 м1 и выше, а также в подземных камерах, на рудных складах и т. п.
Процесс погрузки осуществляется при непрерывном вращении ротора (в направлении движения машины). Роторно-гребковый рабочий орган может работать по одной из двух схем:
1) со свободно падающими гребками, когда гребки, пройдя через верхнее положение, с силой падают на откос штабеля, захватывая груз, и
2) с неподвижно, укрепленными гребками, когда они образуют с ротором жесткую систему. По второй схеме производительность уменьшается, как показали испытания, на 15—17%, однако ротор работает значительно спокойнее и с меньшим дроблением груза. Свободное перемещение вверх и плавное опускание ротора с гребками во время работы осуществляется благодаря демпферному устройству. В период транспортного движения машины подъем ротора обеспечивается гидроцилиндрами. Машина имеет электрогидравлическое управление.
Работы по созданию другой модели гребково-роторной машины на гусеничном ходу типа ЛГИ -1 (на базе машины С-153) выполняются в настоящее время Ленинградским горным институтом совместно с комбинатом Эстонсланец. Специальный вариант гребково-роторной машины типа ТПГР -1 на рельсовом ходу, предназначенный для работы в забоях наклонных выработок, проходимых сверху вниз, разработан и изготовляется на Торецком машиностроительном заводе. Машины ПМГР -1 и ЛГИ -1 предназначены для применения в камерах и при проходке горизонтальных выработок, машина ПТГР -1 — при проходке наклонных выработок.
Машины периодического действия
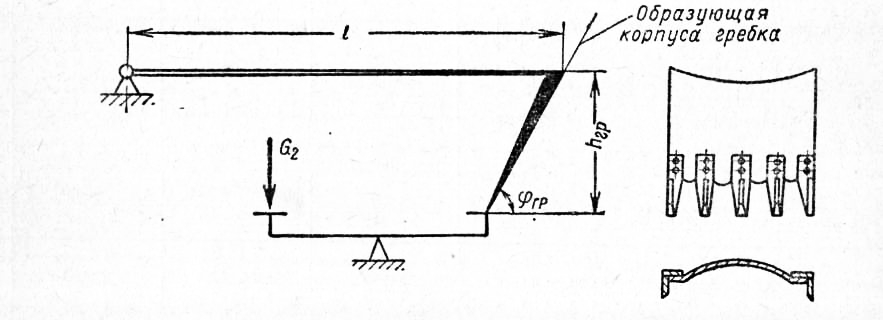
Рис. 6. Форма и параметры гребка.
Цикл работы данных машин состоит из заброса гребка, внедрения и нагребания.
Основными требованиями к конструкции гребка являются:
1. Передняя кромка гребка должна обеспечивать минимальные сопротивления внедрению его в штабель. Исследованиями установлено, что наилучшие результаты обеспечивает гребок с овальной передней кромкой, армированной зубьями трапецеидального сечения (рис. 82) при расстоянии между ними порядка 150—175 мм.
2. Форма корпуса гребка должна обеспечивать минимальные потери насыпного груза при его перемещении; в наиболее полной степени это достигается при овальной форме.
3. Угол наклона гребка должен обеспечивать внедрение гребка в штабель на протяжении всего периода внедрения и нагребания с целью обеспечения максимального захвата породы. Угол фгр является одним из основных параметров, определяющих надежность и эффективность работы по захвату и перемещению материала. В связи с тем, что гребок приходится устанавливать на сравнительно длинной рукояти, а также учитывая, что в процессе работы гребок занимает различные положения (в зависимости от угла поворота стрелы в вертикальной плоскости), за искомую величину обычно принимается угол между направлением образующей гребка и горизонталью в крайнем (нижнем) положении гребка.
4. Вес гребка, приведенный к передней кромке, должен быть достаточным для интенсивного внедрения гребка в штабель и в значительной степени определяет эффективность работы гребкового органа.
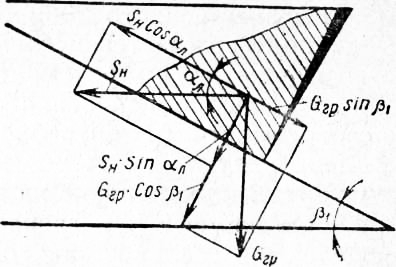
Рис. 7. К определению параметров приемного лотка.
Конструкция приемного лотка должна исключать заклинивание кусков груза между боковыми стенками лотка и гребком и обеспечивать:
1. Минимальный угол подъема груза для исключения повышен
На рис. 84 и 85 приведены графики зависимостей, выявленных при экспериментальных исследованиях полноразмерного гребко-вого органа, проведенных в Институте Гипроникель. Оптимальные значения угла фгр наклона гребка к горизонтали (при погрузке рядового гранита крепостью 14—16 по Протодьяконову и крупностью до 450—500 мм) оказались равными 68°. При уменьшении или увеличении этого угла эффективность захвата резко снижается.
Вес гребка Ge также существенно влияет на эффективность захвата; однако с увеличением вг в значительной степени растут и усилия нагревания S К атегория: — Погрузочные машины для сыпучих материалов