Схемы замещения синхронной машины.
Принцип действия синхронного генератора. Приводной двигатель развивает момент  , вращая ротор генератора с частотой
, вращая ротор генератора с частотой  . По обмотке ротора протекает постоянный ток
. По обмотке ротора протекает постоянный ток  , её МДС
, её МДС  создает магнитный поток ротора
создает магнитный поток ротора  . Вращаясь вместе с ротором относительно статора, поток в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в каждой фазе обмотки статора ЭДС
. Вращаясь вместе с ротором относительно статора, поток в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в каждой фазе обмотки статора ЭДС  . При замкнутой внешней цепи по обмоткам статора протекает ток нагрузки I, который, в свою очередь, образует МДС статора
. При замкнутой внешней цепи по обмоткам статора протекает ток нагрузки I, который, в свою очередь, образует МДС статора  . МДС создает магнитный поток реакции якоря
. МДС создает магнитный поток реакции якоря  и поток рассеяния
и поток рассеяния  (аналогичный асинхронному двигателю), который замыкается поперёк пазов статора и вокруг лобовых частей обмотки статора. Потоки и наводят в обмотке статора соответственно ЭДС
(аналогичный асинхронному двигателю), который замыкается поперёк пазов статора и вокруг лобовых частей обмотки статора. Потоки и наводят в обмотке статора соответственно ЭДС  и
и  .
.
Векторная сумма ЭДС  и падение напряжения на активном сопротивлении обмотки статора
и падение напряжения на активном сопротивлении обмотки статора  равно напряжению на выходах генератора U.
равно напряжению на выходах генератора U.
Магнитные потоки статора и складываются с магнитным потоком ротора , который, взаимодействуя с током статора I, образует тормозной момент  (обратная связь), противодействующий вращающему моменту приводного двигателя. Вырабатываемая статором генератора активная мощность P поступает в электрическую нагрузку.
(обратная связь), противодействующий вращающему моменту приводного двигателя. Вырабатываемая статором генератора активная мощность P поступает в электрическую нагрузку.
Уравнение напряжений обмотки статора.На рис 4.9 приведена схема замещения одной фазы статора генератора. Составим по этой схеме уравнения второго закона
 (4.1)
(4.1)
Здесь — ЭДС, индуцируемая магнитным потоком ротора ; и – ЭДС, индуцируемая соответственно магнитным потоком реакции якоря и потоком рассеяния; — падение напряжения на активном сопротивлении обмотки статора;U – фазное напряжение статора генератора.
 ЭДС и наводятся магнитными потоками и , которые пропорциональны вызывающему их току статора. Поэтому эти ЭДС могут быть выражены через постоянные индуктивные сопротивления
ЭДС и наводятся магнитными потоками и , которые пропорциональны вызывающему их току статора. Поэтому эти ЭДС могут быть выражены через постоянные индуктивные сопротивления  и
и  , т.е.
, т.е.  и
и  . Тогда
. Тогда  .
.
Обозначим сумму внутренних индуктивных сопротивлений машины  , где
, где  – синхронное сопротивление.
– синхронное сопротивление.
Обычно 
 . (4.2)
. (4.2)
Схема замещения генератора, отвечающая уравнению (4.2), изображена на рис. 4.8.
Векторная диаграмма синхронного генератора. Векторную диаграмму строят в соответствии с уравнением (4.2). Если нагрузка генератора активно-индуктивная, то вектор тока статора I отстает по фазе на угол  от вектора напряжения U, а вектор индуктивного
от вектора напряжения U, а вектор индуктивного  падения напряжения
падения напряжения  опережает вектор тока на угол
опережает вектор тока на угол  (рис. 4.10,а). Сумма векторов U и дает вектор ЭДС . Угол
(рис. 4.10,а). Сумма векторов U и дает вектор ЭДС . Угол  между векторами и U называют углом нагрузки, а угол между векторами и I обозначается
между векторами и U называют углом нагрузки, а угол между векторами и I обозначается  . ЭДС соответствует магнитный поток ротора , а напряжению U – результирующий магнитный поток машины
. ЭДС соответствует магнитный поток ротора , а напряжению U – результирующий магнитный поток машины  (рис. 4.9,б). В генераторном режиме поток опережает поток на угол , чему соответствует сдвиг на тот же угол полюса ротора
(рис. 4.9,б). В генераторном режиме поток опережает поток на угол , чему соответствует сдвиг на тот же угол полюса ротора  относительно полюса N и результирующего поля машины. Силовые линии магнитного поля между полюсами показаны тонкими сплошными линиями. В генераторном режиме в результате взаимодействия полюсов и Nобразуется противодействующий момент
относительно полюса N и результирующего поля машины. Силовые линии магнитного поля между полюсами показаны тонкими сплошными линиями. В генераторном режиме в результате взаимодействия полюсов и Nобразуется противодействующий момент  .
.
Работа синхронного генератора на автономную нагрузку. Синхронные генераторы работают в автономном режиме (рис. 4.4, б) в тех случаях, когда промышленная электрическая сеть имеет недостаточную мощность или вообще отсутствует, например, на удалённых строительных площадках, нефтяных и газовых промыслах, лесозаготовительных пунктах, морских и речных судах, летательных аппаратах и т.п. Напряжение на выводах автономно работающего синхронного генератора U в большой степени зависит от нагрузки и её характера.
Зависимость U(I) при n=const, Iв=const и cosφ = const называется внешней характеристикой генератора. Семейство внешних характеристик синхронного генератора при различных cos изображено на рис. 4.10. Характеристики показывают, что напряжение генератора при активно – индуктивной нагрузке ( >0) довольно резко падает, что объясняется размагничивающим действием реакции якоря, а при активно–ёмкостной нагрузке (
По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию (а не в электрическую, как это происходит в трансформаторе), поэтому на схеме замещения добавляют переменное активное сопротивление r2‘(1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Zн.
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания.
Как и у трансформатора, у асинхронного двигателя есть Т-образная схемазамещения.
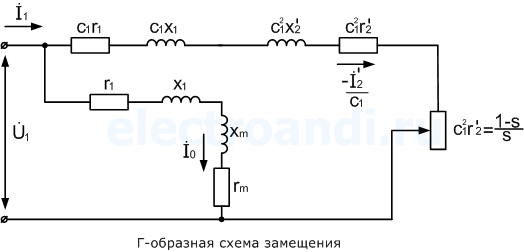 Более удобной при практических расчетах является Г-образная схемазамещения.
Более удобной при практических расчетах является Г-образная схемазамещения.
В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения подводимого к двигателю, к ЭДС статора.
 Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
 89. Схемы замещения трансформатора.
89. Схемы замещения трансформатора.
 Одним из средств изучения работы трансформатора является эквивалентная схема замещения, в которой магнитная связь между обмотками трансформатора замещена электрической связью, а параметры вторичной обмотки приведены к числу витков первичной.
Одним из средств изучения работы трансформатора является эквивалентная схема замещения, в которой магнитная связь между обмотками трансформатора замещена электрической связью, а параметры вторичной обмотки приведены к числу витков первичной.
 Так как в приведенном трансформаторе k=1, то и –E1=E2. В результате точки a1и a2, b1 и b2 имеют одинаковый потенциал, поэтому на схеме их можно соединить, получив тем самым Т-образную схему замещения трансформатора.
Так как в приведенном трансформаторе k=1, то и –E1=E2. В результате точки a1и a2, b1 и b2 имеют одинаковый потенциал, поэтому на схеме их можно соединить, получив тем самым Т-образную схему замещения трансформатора.
Параметры r1, x1 – активное и индуктивное сопротивления первичной обмотки, соответственно.
r2, x2 – приведенные значения активного и индуктивного сопротивлений вторичной обмотки, соответственно.
Zн – полное сопротивление нагрузки.
Магнитный поток не зависит от нагрузки, поэтому его представляют как индуктивное сопротивление xm, активное сопротивление rm, которое обусловлено магнитными потерями и протекающий через них ток холостого хода I. Эти параметры определяются в опыте холостого хода трансформатора.
Изменяя Zн на схеме замещения, можно получить любой режим работы трансформатора. Например, при разомкнутой вторичной обмотке Zн= ∞, что соответствует режиму холостого хода трансформатора, а при Zн= 0 – режиму короткого замыкания. При любых других значениях Zн – режим работы под нагрузкой. Режимы работы необходимы для определения параметров схемы замещения.
При практических расчетах, током холостого хода пренебрегают, тогда схема сводится к упрощенной.