Mc33033 схема управления двигателем
Упрощеный ШИ регулятор Игоря Корхова (МС 33033)
Статья продолжает тему создания устройств управления мощными электродвигателями. В данном случае рассматривается устройство для управления электродвигателем с напряжением питания 24 вольта и мощностью до 2-х киловатт. Но регулятор можно применить и для других напряжений и мощностей, для этого его требуется дополнить устройством понижения напряжения питания электронной части, а транзисторы заменить на другие подходящие по мощности и допустимым напряжениям и токам. Выходной каскад устройства способен управлять десятком указанных на схеме транзисторов.
Представлена несколько упрощенная схема ШИ регулятора разработанная Игорем Юрьевичем Корховым, для его первого электромобиля на базе автомобиля Таврия. Над схемой поработали участники форумов электромобилестроителей, результат предлагается для повторения. Вариант схемы неоднократно повторен, рекомендуется для тиражирования.
Принципиальная схема регулятора:
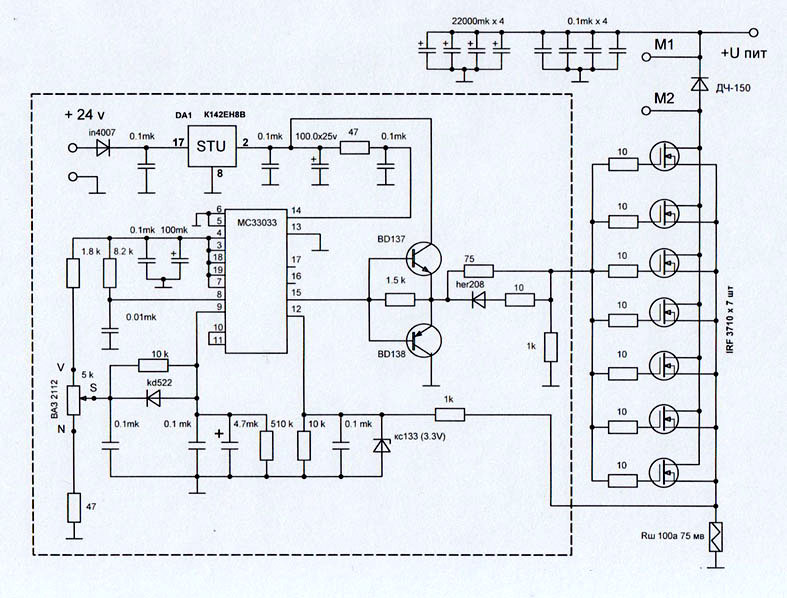
Верхнее положение задатчика оборотов соответствует максимальной помощи. Нижнее положение — отсутствию импульсов. Резисторами в цепи питания потенциометра можно изменить сектор работы рабочего органа потенциометра.
Схема разрабатывалась и испытывалась на электротрайке с напряжением тяговой батареи 24 вольта. Поэтому некоторые элементы расчитаны на питание от 24 вольт, в частности узел питания на интегральном стабилизаторе DA1. При использовании более высокого напряжения необходимо позаботиться о понижении питания до разумной величины (30-18 вольт) или запитать от отдельной батареи аккумуляторов. Силовые выходные транзисторы должны иметь рабочее напряжение не менее 2-х кратно большее напряжения тяговой батареи, а суммарный ток сборки транзисторов в 2-4 раза больше номинального тока нагрузки.
В качестве главного управляющего элемента устройства используется микросхема типа МС33033. Она имеет встроенный узел защиты по перегрузке.
Разводка печатной платы регулятора:
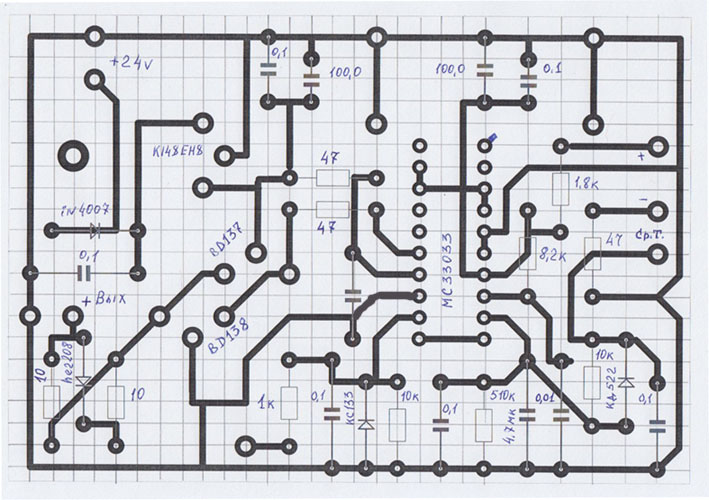
На рисунке должно быть все понятно. Размер печатной платы из одностороннего фольгированного стеклотекстолита
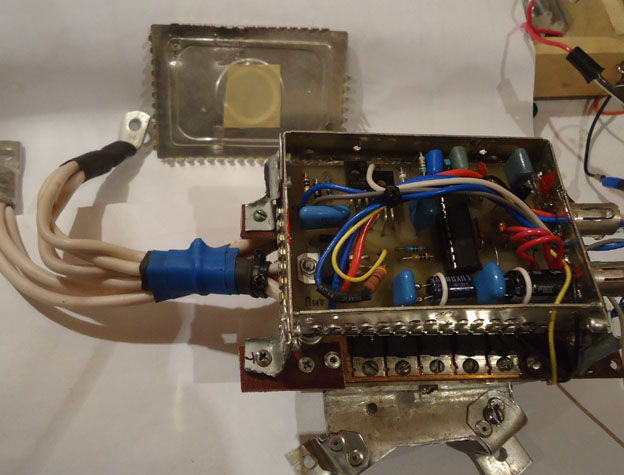
80 х 55 мм. Печатная плата может быть размещена в непосредсвенной близости от силовых транзисторов. В этом случае не лишне позаботиться об экранировании платы управления. Хотя это не является непременным условием. Либо плату управления разнести в пространстве с силовым блоком. На фотографии изображён реальный контроллер автора статьи.
Силовой модуль изготавливается отдельно с тщательным соблюдением требований к силовым устройствам. А демпферный диод вообще рекомендую ставить вблизи электродвигателя или на его клеммы, снабдив небольшим радиатором с площадью пластин 30-50 кв.см.
Обратите внимание на подвод токосьемных проводников. После запаивания транзисторов и резисторов, надо уделить особое внимание прокладке электрических проводов. Необходимо проложить медные жилы непосредственно до выводов транзисторов. И чем толще, тем лучше. Удельные сопротивления припоя и меди различаются почти в десять раз. Поэтому в силовых цепях на припой как на проводник электричества расчитывать не следует. Он создает значительное падение напряжения, что является причиной неравномерной загрузки силовых транзисторов и как следствие ведет к проблемам с качественной работой всего устройства в целом. Чтобы не быть голословным приведу удельные сопротивления: медь — 0.0175 Ом*мм2/м, припой — 0.167 Ом*мм2/м (олово-0.115, свинец-0.221)
Управляющий сигнал к силовому блоку подвести витым проводом и в центр сборки, а еще лучше для каждого транзистора свою витую пару, но это уже как идеальный вариант.
Демпферный диод можно установить как в силовом блоке (если есть место) так и непосредственно на электродвигатель, либо по пути прокладки силовых кабелей.
Схема разрабатывалась с помощью программы Splan v5.0, печатная плата программой SprintLayOut v4.0. Их легко найти на просторах Интернета. Программы также можно скачать здесь на сайте в разделе «Архивы». Они легко и быстро осваиваются в работе даже начинающими.
Для удобства работы с документацией предлагается возможность скачать исходные файлы СХЕМЫ и ЧЕРТЕЖА платы.
Для управления драйвером (ШИМ регулятором) традиционно применяю датчик положения дроссельной заслонки типа 39.3855 от ВАЗовских автомобилей. (Спрашивать в магазине резистивный, электронный не годится) Он устроен не совсем так как хотелось бы. Была попытка разобрать его и усовершенствовать. Разобрать удалось, но усовершенствовать не представляется возможным. Может быть кому-то удастся это сделать. Вот его конструкция (по контуру крышки залит компаунд, он легко колется резаком):
После сборки крышечку залить селиконовым герметиком, излишки удалить до высыхания.
Устройство многократно тиражировалось любителями электротранспорта, ниже приведены фотографии одного из вариантов. Обратите внимание, выполнено на планарном варианте микросхемы.
Обзор компонентов ON Semiconductor для управления электродвигателями
27 октября 2009
Eсли взглянуть на наименования компонентов ON Semi для управления двигателями (табл. 1), то становится видна некая их «интернациональность» по признаку бывшего владельца: AMIS Holding (префикс AMIS), Motorola (префикс MC), Cherry Semiconductor (префикс CS). Каждый из компонентов ONS имеет солидный возраст (за исключением AMIS), и, на первый взгляд, странное упорство сохранять старое наименование на протяжении многих лет на самом деле объясняется высокой популярностью этих компонентов среди производителей и разработчиков. Фактически ONS производит «рабочие лошадки», важность которых на первый взгляд не совсем очевидна, но которые крайне необходимы для работы моторов стиральных машин и другой бытовой техники, привода уличных камер наблюдения, сценического освещения, офисного оборудования, промышленных роботов и станков, игровых автоматов и т.д.
Таблица 1. Компоненты ONS для управления трехфазными и шаговыми двигателями
| Наименование | Назначение | Напряжение питания, В | Макс. рассеиваемая мощность, Вт | Рабочая температура, °C | Корпус |
|---|---|---|---|---|---|
| MC3479 | Контроллер биполярного шагового двигателя со встроенным драйвером и контролем выходного тока | 7,2…16,5 | 1,54 | 0…70 | PDIP-16 |
| MC33030 | Контроллер двигателя постоянного тока | 8…36 | 0,69 | -40…85 | SOIC-16, PDIP-16 |
| MC33033 | Контроллер трехфазного и четырехфазного бесколлекторного двигателя постоянного тока с обратной связью. | 10…30 | 0,62 | -40…85 | SOIC-20, PDIP-20 |
| MCV33033 | 10…30 | 0,62 | -40…125 | SOIC-20 | |
| MC33035 | 10…30 | 0,65 | -40…85 | SOIC-24, PDIP-24 | |
| MCV33035 | 10…30 | 0,65 | -40…125 | SOIC-24 | |
| MC33039 | Преобразователь сигналов датчика положения в импульсный сигнал со скважностью, пропорциональной скорости вращения двигателя | 5,5…9 | 0,65 | -40…85 | SOIC-8, PDIP-8 |
| MCV33039 | 5,5…9 | 0,65 | -40…125 | SOIC-8 | |
| CS4121 | Преобразователь для питания аналогового тахометра/спидометра | 8…16 | – | -40…105 | SOIC-20, PDIP-16 |
| CS8190 | 8,5…16 | – | -40…105 | SOIC-20, PDIP-16 | |
| NCV1124 | Двухканальный преобразователь сигналов датчика Холла | 4,5…5,5 | – | -40…125 | SOIC-8 |
| NCV7001 | Четырехканальный преобразователь сигналов датчика Холла | 4,5…5,5 | – | -40…150 | SOIC-24L |
| AMIS-30512 | Контроллер и драйвер биполярного двухфазного шагового двигателя с микрошаговым управлением | 6,0…30 | 0,6 | -40…125 | SOIC-24 |
| AMIS-30521 (NCV70521) | Контроллер и драйвер биполярного двухфазного шагового двигателя с микрошаговым управлением, SPI | 6,0…30 | 1,3 | -40…125 | NQFP-32 |
| AMIS-30522 | 6,0…30 | 1,3 | -40…125 | NQFP-32 | |
| AMIS-30621 | Контроллер и драйвер биполярного двухфазного шагового двигателя с микрошаговым управлением и встроенным алгоритмом разгона-торможения, LIN | 6,5…29 | 0,6/1,3 | -40…125 | SOIC-20, NQFP-32 |
| AMIS-30622 | 6,5…29 | 0,6/1,3 | -40…125 | SOIC-20, NQFP-32 | |
| AMIS-30623 | 6,5…29 | 0,6/1,3 | -40…125 | SOIC-20, NQFP-32 | |
| AMIS-30624 | Контроллер и драйвер биполярного двухфазного шагового двигателя с микрошаговым управлением и встроенным алгоритмом разгона-торможения, I 2 C | 6,5…29 | 0,6/1,3 | -40…125 | SOIC-20, NQFP-32 |
В начале обзора речь пойдет о почетных и уважаемых «стариках» в списке компонентов для управления двигателями. Несмотря на возраст, их актуальность и востребованность по-прежнему велика.
MC3479 — драйвер двухфазного шагового двигателя с возможностью выбора шагового/полушагового режима, направления вращения и максимального тока обмоток. Благодаря своей простоте и совмещенной с силовым драйвером управляющей логике, MC3479 в основном применяется в схемах управления маломощными и простыми биполярными шаговыми двигателями с небольшим числом полюсов в различной бытовой аппаратуре и промышленности (малогабаритные фрезерные станки).
MC33030 — идеальное решение для применения в простейших сервоприводах, которые требуют изменения положения рабочего органа с помощью маломощного исполнительного двигателя постоянного тока в соответствии с сигналом задания положения. В качестве этого сигнала может выступать сигнал заданного значения регулируемой технологической величины (температуры, давления, освещенности, магнитного потока или любых других величин, которые могут быть преобразованы в напряжение). В качестве сигнала обратной связи по положению подается соответствующее измеренное значение. Компараторы и узел логики управления обеспечивают релейное переключение полярности напряжения на двигателе и режим динамического торможения в зависимости от знака и значения величины рассогласования между заданным значением и полученным по обратной связи. Детектор перегрузки по току при длительной перегрузке вызывает включение триггера-защелки, блокирующего включение силовых ключей до тех пор, пока не будет произведено отключение питания. Благодаря имеющейся в MC33030 задержке времени на включение детектора, этот триггер не реагирует на кратковременный бросок пускового тока двигателя.
MC33035 является вторым поколением высокопроизводительного контроллера бесколлекторного двигателя постоянного тока (БДПТ) и содержит все необходимые функции для реализации разомкнутой системы управления трехфазными и четырехфазными двигателями. В состав ИС входят декодер положения ротора для осуществления требуемой последовательности коммутации фаз двигателя, термостабилизированный источник опорного напряжения, способный осуществлять питание датчика положения ротора, осциллятор с программируемой частотой колебаний, усилитель ошибки, компаратор для формирования ШИМ сигналов, три верхних драйвера с открытым коллектором и три нижних драйвера с высокой нагрузочной способностью по току, идеально приспособленные для управления мощными полевыми транзисторами.
MC33033 отличается от MC33035 только отсутствием раздельных выводов питания Vc и Vcc, инвертирующего входа компаратора ограничения тока, входа блокировки и вывода выходного сигнала ошибки. Для управления четырехфазными бесколлекторными двигателями, а также коллекторными двигателями постоянного тока часть входных сигналов датчика положения селективно объединяется, заземляется или подключается к постоянному напряжению. Коллекторный двигатель постоянного тока может питаться по мостовой схеме от двух из имеющихся трех фаз.
MC33039 — преобразователь сигналов датчика положения в импульсный сигнал со скважностью, пропорциональной скорости вращения двигателя. Фактически на выходе формируются импульсы фиксированной длительности (эта длительность определяется внешней RC-цепочкой — см. рис. 1), но изменяемой частоты, равной частоте входных импульсов датчика положения. Поскольку MC33033 и MC33035 в базовой схеме включения работают без обратной связи по скорости, то для получения более жестких механических характеристик и повышения точности регулирования замыкание контура скорости БДПТ может быть осуществлено при использовании MC33033/MC33035 совместно с адаптером MC33039.

Рис. 1. Типовая схема включения MC33033/MC33035 и MC33039
Для использования в автомобилях или в иных жестких условиях эксплуатации существуют специальные версии ИС: MCV33033/MCV33035 и MCV33039. Они отличаются значительно расширенным диапазоном рабочей температуры (см. табл. 1).
CS4121/CS8190 — генераторы SIN/COS аналоговых сигналов для питания обмоток аналоговых спидометров. В ИС встроен преобразователь «частота-напряжение» совместно с формирователем гармонических сигналов синуса и косинуса, выходным аналоговым буфером и входом калибровки. Микросхемы являются усовершенствованными версиями стандартных промышленных драйверов, используемых в тахометрах CS289 и LM1819.
NCV1124 и NCV7001 — двух- и четырехканальные соответственно преобразователи сигналов датчиков положения, построенных на базе датчиков Холла. Так как сигнал с такого датчика — не прямоугольной формы, имеет постоянную составляющую и зачастую искажен, то для его фильтрации и преобразования в форму, удобную для последующей оцифровки, необходима соответствующая обработка. Поэтому в ИС встроен компаратор, выходной буфер и узел калибровки, который позволяет программно с помощью внешнего микроконтроллера проводить начальную подстройку порога срабатывания компаратора.
AMIS-30512, AMIS-30521 и AMIS-30522 — контроллеры со встроенными драйверами для управления шаговыми двухфазными биполярными двигателями в режиме дробления шага (микрошаг). Управление ИС осуществляется от внешнего микроконтроллера или ПЛИС, в которых должен быть реализован алгоритм управления с характеристиками разгона, торможения и смены направления вращения. Основное отличие AMIS-30522 — наличие последовательного интерфейса SPI, благодаря которому значительно упрощается организация обмена данными между управляющим микроконтроллером и самой микросхемой. Большинство параметров работы контроллера можно установить именно через SPI: амплитуду тока в обмотках двигателя (30…1600 мА), коэффициент дробления шага (1:32, 1:16, 1:8. 1:4, 1:2, 1:1), период срабатывания встроенного сторожевого таймера и его периодический сброс, скорость нарастания напряжения на обмотках (борьба с электромагнитными помехами). Также через SPI можно узнать состояние системы: перегрев кристалла, возникновение перезапуска от сторожевого таймера, сбой схемы питания, превышение тока в ключах встроенного драйвера (индивидуальный контроль), обрыв любой из обмоток двигателя.
AMIS-30621, AMIS-30622, AMIS-30623 и AMIS-30624 являются дальнейшим развитием предыдущего семейства AMIS-305xx. Основное их отличие — встроенный автомат, реализующий алгоритм разгона-торможения и возможность управления через стандартные последовательные интерфейсы I 2 C (AMIS-30624) или LIN (AMIS-30621, AMIS-30622, AMIS-30623). Алгоритм управления AMIS-306xx реализован в виде конечного автомата. То есть достаточно послать команду на перемещение вала двигателя в определенное положение, предварительно задав параметры эпюры разгона-движения-торможения (ускорение разгона и торможения, скорость движения, резонансную частоту), размер микрошага, и дождаться завершения выполнения команды. Благодаря полной автоматизации процесса управления двигателем в AMIS-306xx сокращается время разработки изделия, так как не требуется сложной отладки алгоритма и параметров движения. Более того, встроенный в ИС драйвер упрощает плату, а также уменьшает ее размеры и, следовательно, стоимость изделия.
В качестве заключения стоит отметить очевидное стремление компании ONS охватить как можно большее число направлений работы, что немаловажно в условиях мирового кризиса, когда рынок постоянно перестраивается, и так важно занять и сохранить за собой освободившееся вакантное место. При этом нужно одновременно удерживать давно занятые позиции. Компромиссное решение найти сложно, но, судя по динамике развития ON Semiconductor, это решение найдено.