Машины по типу ходовых устройств могут быть
Ходовое устройство строительных машин служит для передачи силы тяжести машины и внешних нагрузок на грунт и обеспечивает перемещение машины по грунту дорогам или рельсам. В строительных машинах применяют ходовые устройства: рельсоколесные, пневмоколесные, гусеничные и шагающие. Каждое из этих устройств состоит из движителя и подвески.
Движителем называют элементы ходового устройства, передающие на основание (рельсы, грунт, дорожное покрытие) внешние нагрузки и силу тяжести машины, находящиеся в сцеплении с основанием и сообщающие движение машине.
Подвеской называется комплект деталей, соединяющих движитель с опорной рамой машины. Тихоходные машины имеют жесткое подвесное устройство, а быстроходные— упругую подвеску в виде рессор или пружин.
Рекламные предложения на основе ваших интересов:
Рельсоколесное ходовое устройство применяют для строительных машин, срок работы которых на одном месте продолжителен, и машин, для которых применение другого вида оборудования невозможно или весьма затруднительно, например железнодорожные краны, козловые краны, башенные краны, экскаваторы непрерывного действия поперечного черпания и ряд других машин.
Колеса башенных и козловых кранов изготовляют двухребордными (рис. 49), а кранов, передвигающихся по железнодорожной колее, — одноребордными. Поверхность качения двухребордных колес цилиндрическая, а колес железнодорожного хода — слегка коническая.
Рельсовые колеса установлены свободно на подшипниках скольжения (см. рис. 49, а) или качения (см. рис. 49, в), расположенных в ступице колеса. Привод к приводным колесам осуществляется зубчатым венцом, прикрепленным к его ободу. Ходовые колеса устраивают и на валах, вращающихся на подшипниках, установленных с двух сторон колеса. Привод ходового колеса в этом случае осуществляется с помощью зубчатого колеса, закрепленного на консоли вала. В первом случае ось колеса несет только изгибающие нагрузки, во втором— вал работает на изгиб и кручение.
Основные размеры крановых колес стандартизированы. Материал колес — сталь 75 и сталь 65Г или стальное литье марок 40Л и 55Л. Ходовые колеса рассчитывают на смятие поверхности контакта с рельсом. Расчет ходового колеса состоит в определении контактного напряжения смятия и сравнении его с допускаемыми для данных материалов. Чем больше диаметр колеса и ширина головки рельса, тем меньше контактное напряжение смятия.
Рис. 49. Колеса кранов
а — холостое колесо; б, е — приводные колеса; 1 — колесо; 2 — подшипник скольжения; 3 — под4иипнкк качения; 4 — зубчатый венец; 5 — подшипник; 6 — зубчатое колесо
Рис. 50. Ходовые тележки
а — двухколесная; б — четырх-колесная; 1 — флюгер; 2 — рама; 3 — ось; 4 — растяжка; 5 — главная балансирная балка; б— дополнительные балансирные балки
Для подкрановых путей применяются в основном стандартные железнодорожные рельсы типа Р-43, Р-50, Р-65, а также специальные подкрановые рельсы. При стальном колесе и рельсе Р-50 допускаемая нагрузка на одно колесо составляет 200…270 кН.
Распределение больших нагрузок на несколько колес целесообразнее, чем применение колес большего диаметра и тяжелых рельс с широкой головкой. В этом случае несколько ходовых колес собирают в одну тележку, соединяемую с конструкцией вертикальным и горизонтальным шарниром (рис. 50, с). Благодаря горизонтальному шарниру обеспечивается равномерное распределение нагрузок на колеса, а вертикальный шарнир способствует прохождению машины по криволинейным путям и дает возможность перестанавливать машину на перпендикулярные пути без демонтажа.
Для прохождения машины по рельсовым путям с малым радиусом ходовые тележки соединяют с основной paмой машины с помощью выносных кронштейнов (флюгеров). Флюгер (см. рис. 50, а) соединяется с рамой; вертикальной осью. При движении по криволинейному участку пути два кронштейна из четырех свободно вращаются на осях, а два других прикреплены к раме растяжками. При очень больших нагрузках применяются 4-колесные тележки (см. рис. 50,6).
Пневмоколесный ход применяют в строительных машинах высокой маневренности, предназначенных для передвижения по шоссейным дорогам с твердым покрытием. Транспортная скорость кранов и экскаваторов на пневмоколесном ходу может достигать 40…60 км/ч.
Пневмоколесо (рис. 51) состоит из металлического обода, камерной или бескамерной шины, надеваемой на обод, и деталей крепления шины. Пневматическая камерная шина состоит из покрышки, камеры, в которую накачивают воздух, ободной ленты и вентиля. Бескамерные шины удерживают накачиваемый в них воздух благодаря герметическому прилеганию к поверхности обода.
Шины высокого давления 0,5…0,7 МПа используют преимущественно на дорогах с твердым покрытием и низкого давления 0,125…0,35 МПа на грунтовых дорогах. Для повышения проходимости машин применяют шины с регулируемым давлением от сверхнизкого 0,05… г …0,08 МПа для езды по слабым грунтам до высокого — t; при переходе машины на устойчивые грунты и дороги с твердым покрытием. Давление в этих шинах регулирует водитель из кабины.
Для увеличения сцепления машины с грунтом и, следовательно, для улучшения проходимости делают привод на все колеса и применяют шины с высокими грунтозацепами.
Рис. 51. Пневматические колеса
а — одиночное неприводное; б — сдвоенное приводное; 1 — обод; 2 — покрышка; 3 — камера
Размеры шин стандартизированы. Они обозначаются двумя цифрами, первая из которых — ширина профиля, а вторая —внутренний диаметр шины. Величина допускаемой нагрузки на шину зависит от числа прокладок в шине и скорости движения и определяется по каталожным данным.
Гусеничный ход (рис. 52) применяют в машинах, которые передвигаются по местностям, не имеющим дорог, или по грунтовым дорогам, а также для обеспечения большого тягового усилия.
Движитель гусеничного хода машины состоит из двух бесконечных гусеничных цепей (лент), образуемых из шарнирно-связанных между собой отдельных плоских звеньев (пластин, траков). Движение к ведущей звездочке от двигателя передается через карданный вал, дифференциал, базовые редукторы. Гусеничная цепь охватывает приводную и натяжную звездочки, установленные на концах балок, связанных с рамой ходовой тележки. Натяжение ленты достигается перемещением натяжной звездочки в пазах балок с помощью винта.
Рис. 52. Схема механизма передвижения на гусеничном ходу а — общий вид: б — кинематическая схема; 1 — ведущая звездочка; 2— тележка; 3, S — ролики; 4 — балка; 5 — звездочка натяжения; 6 — гусеничная цепь; 7 — винт; 9 — рама; 10 — вал; 11 — двигатель; 12, 14 — бортовые редукторы; 13— дифференциал
Нагрузка от машины передается на нижнюю ветвь гусеничной цепи с помощью опорных роликов. Движение гусеничного хода по кривой осуществляется притормаживанием одной из гусениц, а разворот — также притормаживанием одной из гусениц или вращением гусениц в противоположные стороны. Холостая ветвь гусеницы предохраняется от провисания поддерживающими роликами.
Гусеницы делают из крупных или мелких звеньев. Крупные звенья обеспечивают более равномерное давление на грунт, но не обеспечивают больших скоростей перемещения машины. Гусеницы с мелкими звеньями более быстроходны. Изготовляют звенья гусениц из стали: мелкие —штамповкой, а крупные — отливкой.
Благодаря большой опорной поверхности гусеничный ход может обеспечить небольшие удельные давления на грунт 0,04…0,1 МПа. Коэффициент сцепления гусеницы с грунтом достигает 1,0 и выше, поэтому гусеничные машины могут развивать тяговое усилие, значительно большее, чем пневмоколесные.
В настоящее время в строительных машинах широко применяют гусеничные звенья тракторного типа, допускающие несколько большие скорости передвижения, чем ранее применявшиеся с гребенчатым грунтозацепом.
Недостатки гусеничного хода: малая скорость перемещения, недопустимость перемещения тяжелых машин по дорогам с усовершенствованным покрытием (из-за порчи последнего), и необходимость в этом случае перевозки на специальных транспортных прицепах-тяжеловозах (трайлерах).
ГЛАВА 3. ХОДОВОЕ ОБОРУДОВАНИЕ
Назначение, структура, виды ходового оборудования, основные
Характеристики.
Ходовое оборудование предназначено для передачи нагрузок на опорное основание и для передвижения машин. Оно может быть активным и пассивным. Активным ходом оборудуют самоходные машины, а пассивным — машины, перемещаемые на буксире за тягачом, в качестве которого может быть использована любая самоходная машина. Ниже будут описаны активные ходовые устройства.
Ходовое оборудование включает взаимодействующий с опорным основанием движитель, подвеску и опорную раму или оси, а в самоходных машинах, кроме того, механизм передвижения. По типу движителя ходовое оборудование подразделяют на гусеничное, шинноколесное, рельсоколесное и специальное.
Гусеничное ходовое оборудование применяют для передвижения по бездорожью, а также в машинах, для которых передвижение не является основной операцией как, например, в одноковшовых экскаваторах, где оно используется, в основном, для передачи нагрузок, включая рабочие, на опорное основание и для передвижения экскаватора на новую рабочую позицию в пределах одной и той же рабочей площадки. Для передвижения таких машин на большие расстояния обычно используют тягачи со специальными прицепами-трайлерами.
Шинноколесное ходовое оборудование устанавливают на машинах, для которых транспортная операция занимает по времени соизмеримую с другими операциями часть технологического цикла, как, например, у самоходных скреперов, перемещающих грунт в своем ковше на расстояния нескольких километров. Такой же вид ходового оборудования имеют машины, часто меняющие рабочие площадки, отстоящие одна от другой на значительных расстояниях. Особенностью такого вида ходового оборудования являются повышенные транспортные скорости, соизмеримые со скоростями грузовых автомобилей.
Рельсоколесным ходом оборудуют машины, работающие в ограниченной зоне с идентичными транспортными траекториями, например, башенные краны, некоторые виды карьерных экскаваторов непрерывного действия и др. Всякое изменение размеров рабочей зоны этих машин связано с перекладкой путей и обосновано только в случае небольших затрат на эти работы.
К специальным ходовым устройствам относятся шагающие, вездеходные и др. Гусеничные движители (гусеницы) монтируют на раме, называемой также нижней рамой, в отличие от верхней рамы, входящей в остов машины. Шинноколесные движители (ходовые колеса) устанавливают обычно на мостах. Рельсоколесные движители в виде металлических колес закрепляют на осях нижней рамы, или  объединяют по несколько колес балансирами, шарнирно соединенными с нижней рамой посредством вертикально установленных шкворней.
объединяют по несколько колес балансирами, шарнирно соединенными с нижней рамой посредством вертикально установленных шкворней.
Нижние рамы (оси) соединяют с верхними рамами машины с помощью подвесок, которые бывают жесткими, полужесткими и мягкими. Соединение по жест-вески KOg схеме . на болтах и на пальцах, по мягкой схеме – с помощью пружин и рессор, в случае полужесткой схемы (рис. 3.1) одну часть нижней рамы соединяют с верхней рамой по жесткой, а вторую — по мягкой схеме. При движении мягкая подвеска способствует снижению динамических нагрузок от неровностей дороги. Для этих же целей в состав мягких подвесок вводят гидравлические, работающие по принципу гидравлического дросселя, или гидропневматические амортизаторы.
Основными технико-эксплуатационными показателями ходового оборудования являются: скорость передвижения, проходимость — способность передвигаться в различных эксплуатационных условиях, прежде всего, по рыхлым или переувлажненным грунтам и маневренность — способность изменять направление движения в стесненных условиях.
Проходимость машины при прочих равных условиях определяется глубиной колеи, образуемой в результате взаимодействия ходового оборудования с грунтом, дорожным просветом (клиренсом) — расстоянием от наиболее низкой части машины (кроме движителя) до опорной поверхности и сцепными качествами ходового оборудования. Глубина колеи h (м) увеличивается с ростом давления р (МПа) на контактной поверхности между опорной частью ходового оборудования и грунтом. Эти величины связаны между собой примерно пропорциональной зависимостью:

где с — коэффициент постели, значения которого колеблются в широких пределах — от 0,1 — 0,5 МПа/м для свеженасыпанного песка и мокрой размягченной глины до 20 — 100 МПа/м для мягких скальных грунтов, известняков, песчаников, мерзлоты.
Обычно удельные давления распределяются по контактной поверхности неравномерно. Различают среднее и максимальное удельное давление. Под средним удельным давлением понимают такое давление, которое имело бы место при равномерном распределении давлений по всей контактной поверхности. Его определяют как отношение нормальной к контактной поверхности нагрузки к площади этой поверхности. Максимальные удельные давления, хотя и действуют в отдельных точках контактной поверхности, определяют ту деформацию грунта, а следовательно, и глубину колеи, которая образуется в результате передвижения машины. Именно этот показатель определяет проходимость машины.
Более высокой проходимостью обладает гусеничное ходовое оборудование, имеющее развитую опорную поверхность движителя, обеспечивающую удовлетворяющие условиям эксплуатации удельные давления на грунт и меньшую, чем у шинноколесных машин его осадку. Гусеничные движители не теряют своей транспортной способности даже при погружении в грунт до половины своей высоты. В то же время они уступают шинноколесным по скорости передвижения, которая для большинства гусеничных машин не превышает 10 км/ч. Для рельсоколесных машин понятие проходимости теряет смысл, поскольку эти машины передвигаются по стальным рельсам, уложенным на подготовленное основание с соблюдением нормированных уклонов.
Маневренность характеризуется радиусом разворота R и шириной дорожного коридора Вак В зависимости от вида привода гусеничные машины могут разворачиваться относительно одной заторможенной гусеницы (рис. 3.2, а) (при групповом приводе) и относительно собственной оси (рис. 3.2, б) (при индивидуальном приводе включением гусениц на движение во взаимно противоположных направлениях). В первом случае радиус поворота, определяемый как радиус дуги А0В0 (рис. 3.2, а), описываемой центром опорного контура гусеничного движителя, постоянен, равен половине колеи В, а во втором случае (рис. 3.2, б) он равен нулю. При повороте на угол а относительно одной заторможенной гусеницы I (рис. 3.2, а) центр опорного контура перемещается по траектории 7 — А0В0 — 2. При этом траектория центра гусеницы I представляется ломаной линией 7,-0-2, без плавного перехода, а траектория центра забегающей гусеницы II — прямыми 72 и 22, сопряженными дугой окружности А2В2. При повороте относительно собственной оси (рис. 3.2, б) центр опорного контура движется по ломаной 1-2 без плавного перехода, центр забегающей гусеницы II — с плавным переходом по дуге А2В2, а центр отстающей гусеницы 7- по траектории /, -А\ВХ- 2, с возвратным движением на дуге Л ,7?|.
Для шинноколесных машин радиус поворота R определяется как радиус дуги окружности средней точки оси управляемых колес (рис. 3.2, в, д) или колес с управляемой
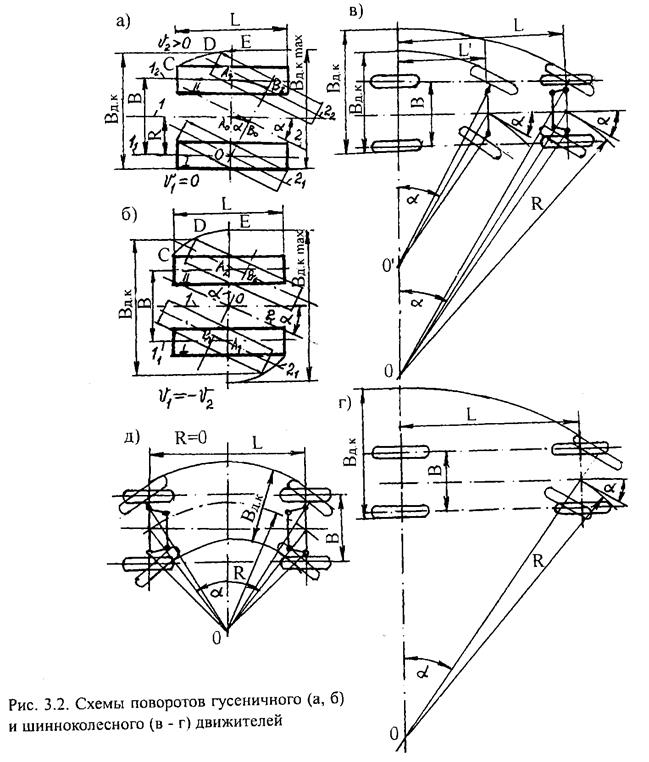
осью (рис. 3.2, г). Он зависит от угла поворота а: чем больше этот угол, тем меньше радиус R. С уменьшением базы машины L’ (расстояния между осями задних и передних колес), уменьшается также радиус поворота. Поэтому для работы в стесненных условиях обычно применяют короткобазовые пневмоколесные движители. Меньшие радиусы поворота имеют также двухосные колесные движители со всеми управляемыми колесами (рис. 3.2, д). Гусеничные машины более маневренны по сравнению с шинноколесны-ми, выполненными по описанным выше схемам, в связи с тем, что они имеют меньшие радиусы поворота.
Ширина дорожного коридора есть ширина следа разворачивающейся машины. Этим параметром определяется вписываемость машины в ситуационную схему трассы передвижения. Ширина дорожного коридора как для гусеничных, так и для шинноко-лесных движителей зависит от угла поворота. Для гусеничного движителя ее максимальное значение 5д_клтах достигается при таком угле поворота а, когда наиболее удаленная от полюса вращения задняя точка С (см. рис. 3.2, а, б) забегающей гусеницы займет положение Е на поперечной оси исходного (предшествующего повороту) положения гусениц. При дальнейшем увеличении угла поворота значение Вд к тах остается неизменным. При повороте относительно собственной оси это значение больше, чем в случае поворота относительно одной заторможенной гусеницы. Для шинноколесных машин значение 5Д к тах соответствует наибольшему углу поворота. При равной колее наименьшую ширину дорожного коридора имеют двухосные шинноколесные движители со всеми управляемыми колесами (рис. 3.2, д).