Рулевые машины
Рулевые машины по виду используемой энергии делятся на ручные, паровые, электрические и гидравлические. Часто применяют различные комбинации этих основных типов: пароручные, парогидравлические, ручные гидравлические и электрогидравлические.
Ручные рулевые машины устанавливают только на небольших самоходных судах. Как правило, их комбинируют со штуртросовой проводкой или валиковой передачей. Конструкция этих машин довольно проста и включает в себя штурвальную тумбу, внутри которой располагается зубчатая передача (ведущая и ведомая шестерни), тяговый барабан (при штуртросовой проводке) или звездочки (при цепном штуртросе). Вся система приводится в движение от штурвального колеса, поворачиваемого руками штурвального. Процесс управления судном в этом случае становится довольно утомительным и требует от штурвального большой внимательности. Для облегчения его работы ранее применялись пароручные рулевые машины, которые, как правило, изготовлялись двухцилиндровыми в вертикальном или горизонтальном исполнении. На современных судах паровые рулевые машины полностью вытеснены ручными гидравлическими плунжерными рулевыми машинами, облегчающими и упрощающими управление судном.
Схема ручной гидравлической рулевой машины приведена на рис. 112. Внутри штурвальной тумбы 8 смонтирован ручной масляный нагнетательный насос 7, приводимый в действие вращением штурвала 9. При помощи труб 1 насос соединяется с двумя гидравлическими цилиндрами 2 рулевой машины. В цилиндрах перемещается плунжер 10, связанный с баллером 5 руля 6 посредством регистра 3 и румпеля 4. В зависимости от направления вращения штурвала масло подается насосом в один из цилиндров, и руль соответственно перекладывается на тот или иной борт. Обводной трубопровод 1 снабжается предохранительным клапаном 11, предназначенным для перепуска масла при повышении давления в системе выше номинального.

Рис. 112. Схема ручной гидравлической румпельной рулевой машины.
Ручные гидравлические машины создают небольшие крутящие моменты на баллере руля (2500—10 000 н · м) и очень редко снабжаются следящей системой контроля за перекладкой руля, поэтому они применяются в основном для судов малого водоизмещения. На средне- и крупнотоннажных судах находят широкое применение электрические, гидравлические и электрогидравлические рулевые машины большой мощности, снабженные следящими системами контроля и позволяющие автоматизировать управление ими.
Электрические рулевые машины, широко распространенные на судах транспортного флота, имеют в качестве исполнительного рулевого двигателя реверсивный электродвигатель с большой частотой вращения (до 3000 об/мин). Поэтому исполнительный электродвигатель спаривают с червячной передачей, передающей крутящий момент на зубчатый сектор баллера руля и позволяющей значительно уменьшить частоту вращения рулевого привода. Кроме того, самотормозящая червячная пара (червяк и червячное колесо) при остановке электродвигателя обеспечивает остановку руля.
Исполнительный электродвигатель управляется из рулевой рубки нажатием кнопки или вращением штурвала. При кнопочном управлении электродвигатель запускается нажатием кнопки соответствующего борта и вращается в определенном направлении до тех пор, пока кнопка не будет отпущена. Управление штурвалом обеспечивает курсозависимое дистанционное управление, т. е. управление, при котором угол отклонения руля соответствует отклонениям указателя положения руля при штурвальной тумбе.
Электрические рулевые машины изготовляют для работы как rfa постоянном, так и на переменном токе. Обычно их используют при диапазоне крутящих моментов на баллере от 6300 до 16 000 н-м, т. е. в основном для судов среднего водоизмещения.
Электрогидравлические рулевые машины, устанавливаемые на современных крупных морских судах и быстроходных судах среднего водоизмещения, имеют гидравлический привод баллера руля (рис. 113). Такой привод располагается в румпельном помещении судна и передает от рулевой машины непосредственно на баллер руля усилие, необходимое для его поворота. Для этой цели служат четыре (или два) гидравлических цилиндра 3, соединенных посредством двух поперечных 2 и двух продольных 4 балок в один общий блок. Крепление блока к судовому фундаменту производится лампами 1 цилиндра 3.

Рис. 113. Гидравлический привод баллера руля.
В цилиндрах располагаются плунжеры 6, перемещающиеся вдоль оси цилиндров под давлением масла, шарнирно соединенные при помощи цапф 7 с поперечным румпелем 8. Румпель, при помощи шпонок жестко соединяется с баллером 9 руля. Для
уменьшения нагрузки от боковых усилий, возникающих при повороте румпеля, плунжеры 6 имеют ползуны 5, скользящие по направляющим плоскостям продольных балок. При повороте румпеля его цапфы 7 перемещаются в шарнирах 11 (см. узел А), цапфы 10 которых при этом могут вращаться в отверстиях вилок плунжеров вокруг оси I—I. Таким образом обеспечивается свободный поворот румпеля, а вместе с ним и руля при продольном перемещении плунжеров в гидравлических цилиндрах привода.
В состав электрогидравлической рулевой машины (рис. 114), кроме гидравлического привода А, входят следующие основные узлы: масляные электронасосы переменной производительности Б; механизм В управления насосами переменной производительности; масляный трубопровод Д с главной клапанной коробкой; телемоторы Г, предназначенные для гидравлического управления рулевой машиной с дистанционных постов управления № 1 я № 2; ручной (аварийный) масляный насос и система указателей положения руля (на схеме не показаны).

Рис. 114. Схема электрогидравлической рулевой машины.
Устройство и принцип действия электронасосов Б переменной производительности были рассмотрены ранее в § 29 (см. рис. 94).
Эти насосы подают масло под Давлением до 15 000 кн/м 2 (150 кгс/см 2 ) в гидравлические цилиндры привода А в зависимости от расположения направляющего кольца насоса. В указанном положении (рис. 114) рабочее масло по трубам 5 и 6 нагнетается насосом переменной производительности Б в главную коробку 7, а из нее по трубам 4 и 8 направляется в два гидравлических цилиндра 2, расположенных по диагонали. В это время из другой пары цилиндров масло отсасывается вторым насосом переменной производительности. Под давлением масла плунжеры 1 перемещаются вдоль осей цилиндров, передавая усилия на цапфы 9 поперечного румпеля 10 и поворачивая баллер 11 руля. Поворот руля (в данном случае на правый борт) будет происходить до тех пор, пока тяга 3 не возвратит направляющее кольцо насоса переменной производительности в среднее положение. При этом подача масла в гидравлические цилиндры прекратится и руль будет зафиксирован в заданном положении.
Гидравлический телемотор Г состоит из двух цилиндров с поршнями. Один из цилиндров (передаточный) установлен на ходовом мостике, другой (приемный) — у рулевой машины. Полости цилиндров соединены трубопроводом, вся система заполнена жидкостью— обычной водой с глицерином. Вращение штурвала передается поршню передаточного цилиндра, вызывая его перемещение и увеличение давления жидкости на поршень приемного цилиндра. В результате этого поршень приемного цилиндра перемещается, воздействуя при помощи системы тяг на насосы переменной производительности, связанные трубопроводом рабочего масла с гидравлическим приводом баллера. Таким образом, все основные узлы электрогидравлической рулевой машины соединяются между собой трубопроводом, который состоит из труб рабочего масла, труб управления телемотором, труб смазочного масла и арматуры. По трубам смазочного масла подается смазка к трущимся частям рулевой машины.
Наиболее важной арматурой является главная распределительная коробка, в которой размещены четырнадцать клапанов: восемь разобщительных — по четыре клапана для насосов переменной производительности и для гидравлических цилиндров привода, четыре перепускных и два предохранительных. Все эти клапаны служат для регулирования подачи рабочего масла к механизмам рулевой машины и предохранения всей системы от повышенного давления масла.
Электрогидравлические плунжерные рулевые машины находят в настоящее время преимущественное применение по сравнению с другими типами рулевых машин. Это объясняется тем, что они имеют более гибкое регулирование скоростей в широком диапазоне и точный контроль положения руля. Отечественные рулевые машины такого типа выполняются в двух вариантах: двухцилиндровые— с вращающим моментом на баллере до 100 кн-м (10 тс-м) и четырехцилиндровые — с вращающим моментом от 160 до 2000 кн-м (от 16 до 200 тс-м). Рабочее давление масла у таких машин колеблется от 7000 до 15 000 кн/м 2 (от 70 до 150 кгс/см 2 ).
В последнее время на малых промысловых и транспортных судах (дедвейтом 25 000—29 000 т) стали применять лопастные, или крыльчатые, электрогидравлические рулевые машины. По сравнению с плунжерными такие машины значительно компактнее, проще и легче, у них отсутствуют массивные гидравлические приводы, отпадает необходимость в румпеле и т. д.
В состав лопастной электрогидравлической рулевой машины (рис. 115, а) входят: рулевая тумба 1 со штурвалом и телемотором, трубопровод 2, клапан остановки 3, насос переменной производительности 4 с электродвигателем 5, контактор 6 для пуска электродвигателя, лопастной гидромотор 7 и главная распределительная коробка 8. Ротор гидромотора (рис. 115, б), снабженный лопастями, непосредственно соединяется с баллером руля, а его лопасти располагаются между неподвижными сегментами. В эти полости от насоса 4 через каналы 10 и кольцевой зазор 9 подается рабочая жидкость под давлением 4500— 5000 кн/м 2 (45—50 кгс/см 2 ), которая давит на лопасти, создавая необходимый вращающий момент на баллере. Поворот руля на правый или левый борт зависит от направления подачи рабочей жидкости (масла) к гидромотору. Гидромотор крепится к судовому фундаменту основанием 11.

Рис. 115. Схема лопастной электрогидравлической рулевой машины.
Большой интерес представляет применение в качестве привода баллера гидравлического шарнира, представляющего собой винтовое соединение вала баллера с подвижной гайкой, помещенной в гидравлическом цилиндре. Гайка специальными выступами соединяется с цилиндрической стальной рубашкой, закрепленной при помощи шпонок на валу баллера. При подаче рабочей жидкости в одну из полостей между корпусом цилиндра и гайкой жидкость давит на кольцевой фланец гайки, заставляя ее совершать вращательно-поступательное движение вдоль внутренней стенки цилиндра, имеющей винтовую нарезку. Вращательное движение гайки через рубашку передается на баллер. Совмещение гидравлического шарнира с баллером делает привод компактным и позволяет практически отказаться от румпельного отделения.
При использовании электрогидравлических рулевых машин на современных судах стало возможным применение системы автоматического удержания судна на заданном курсе с помощью авторулевого. Этот прибор, компонуемый в виде штурвальной тумбы, автоматически воздействует на рулевой привод при получении сигнала от датчика курса (обычно гирокомпаса).
Рулевое устройство судна


 Рулевое устройство служит для изменения направления движения судна или удерживать его на заданном курсе.
Рулевое устройство служит для изменения направления движения судна или удерживать его на заданном курсе.
В последнем случае задачей рулевого устройства является противодействие внешним силам, таким как ветер или течение, которые могут привести к отклонению судна от заданного курса.
Рулевые устройства известны с момента возникновения первых плавучих средств. В древности рулевые устройства представляли собой большие распашные весла, укрепленные на корме, на одном борту или на обоих бортах судна.
Во времена средневековья их стали заменять шарнирным рулем, который помещался на ахтерштевне в диаметральной плоскости судна. В таком виде он и сохранился до наших дней.
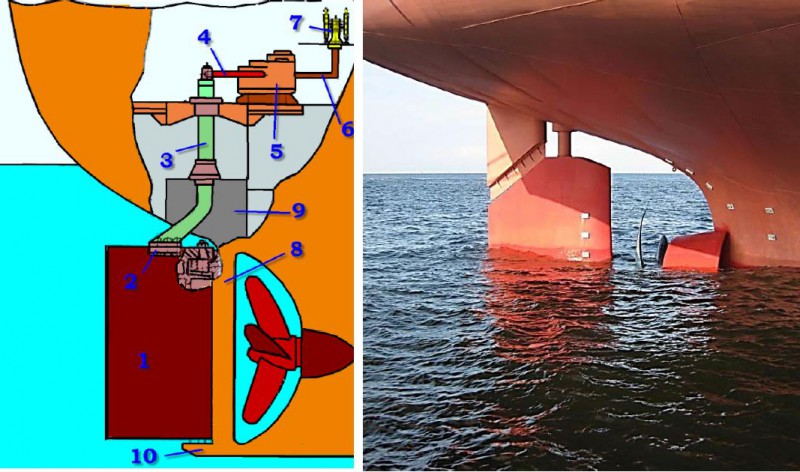
Рулевое устройство состоит из руля, баллера, рулевого привода, рулевой передачи, рулевой машины и поста управления (рис. 1.34).
Рис. 1.34. Рулевое устройство: 1 — перо руля; 2 — фланцевое соединение; 3 — баллер; 4 – рулевой привод; 5 — рулевая машина; 6 — рулевая передача; 7 — штурвал ручного управления; 8 — рудерпост; 9 — гельмпортовая труба; 10 — пятка ахтерштевня
Рулевое устройство должно иметь два привода: главный и вспомогательный.
Главный рулевой привод — это механизмы, исполнительные приводы перекладки руля, силовые агрегаты рулевого привода, а также вспомогательное оборудование и средства приложения крутящего момента к баллеру (например, румпель или сектор), необходимые для перекладки руля с целью управления судном в нормальных условиях эксплуатации.
Вспомогательный рулевой привод — это оборудование необходимое для управления судном в случае выхода из строя главного рулевого привода, за исключением румпеля, сектора или других элементов, предназначенных для той же цели.
Главный рулевой привод должен обеспечивать перекладку руля с 350 одного борта на 350 другого борта при максимальной эксплуатационной осадке и скорости переднего хода судна не более чем за 28 секунд.
Вспомогательный рулевой привод должен обеспечивать перекладку руля с 150 одного борта на 150 другого борта не более чем за 60 секунд при максимальной эксплуатационной осадке судна и скорости, равной половине его максимальной эксплуатационной скорости переднего хода.
Управление вспомогательным рулевым приводом должно быть предусмотрено из румпельного отделения. Переход с главного на вспомогательный привод должен выполняться за время, не превышающее 2 минуты.
Руль — основная часть рулевого устройства. Он располагается в кормовой части и действует только на ходу судна. Основной элемент руля — перо, которое по форме может быть плоским (пластинчатым) или обтекаемым (профилированным).
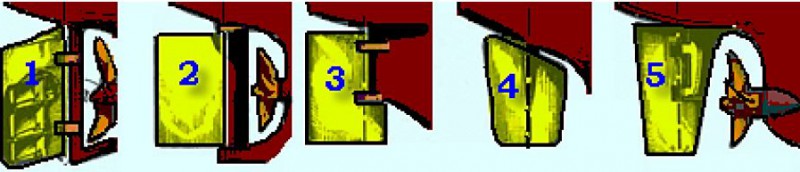
По положению пера руля относительно оси вращения баллера различают (рис. 1.35):
обыкновенный руль — плоскость пера руля расположена за осью вращения;
полубалансирный руль — только большая часть пера руля находится позади оси вращения, за счет чего возникает уменьшенный момент вращения при перекладке руля;
балансирный руль — перо руля так расположено по обеим сторонам оси вращения, что при перекладке руля не возникают какие-либо значительные моменты.
Рис. 1.35. Типы рулей: 1 — обыкновенный руль; 2 — балансирный руль; 3 — полубалансирный руль (полуподвесной); 4 — балансирный руль (подвесной); 5 — полубалансирный руль (полуподвесной)
В зависимости от принципа действия различают пассивные и активные рули. Пассивными называются рулевые устройства, позволяющие производить поворот судна только во время хода, точнее сказать, во время движения воды относительно корпуса судна.
Винторулевой комплекс судов не обеспечивает их необходимую маневренность при движении на малых скоростях. Поэтому на многих судах для улучшения маневренных характеристик используются средства активного управления, которые позволяют создавать силу тяги в направлениях, отличных от направления диаметральной плоскости судна. К ним относятся: активные рули, подруливающие устройства, поворотные винтовые колонки и раздельные поворотные насадки.
Активный руль — это руль с установленным на нем вспомогательным винтом, расположенным на задней кромке пера руля (рис. 1.36). В перо руля встроен электродвигатель, приводящий во вращение гребной винт, который для защиты от повреждений помещен в насадку.
За счет поворота пера руля вместе с гребным винтом на определенный угол возникает поперечный упор, обусловливающий поворот судна. Активный руль используется на малых скоростях до 5 узлов.
При маневрировании на стесненных акваториях активный руль может использоваться в качестве основного движителя, что обеспечивает высокие маневренные качества судна. При больших скоростях винт активного руля отключается, и перекладка руля осуществляется в обычном режиме.
Раздельные поворотные насадки (рис. 1.37). Поворотная насадка — это стальное кольцо, профиль которого представляет элемент крыла. Площадь входного отверстия насадки больше площади выходного.
Гребной винт располагается в наиболее узком ее сечении. Поворотная насадка устанавливается на баллере и поворачивается до 40° на каждый борт, заменяя руль.
Раздельные поворотные насадки установлены на многих транспортных судах, главным образом речных и смешанного плавания, и обеспечивают их высокие маневренные характеристики.
Рис. 1.36 Активный руль

Рис. 1.37. Раздельные поворотные насадки

Подруливающие устройства (рис. 1.38). Необходимость создания эффектив- ных средств управления носовой оконечностью судна привела к оборудованию судов подруливающими устройствами.
ПУ создают силу тяги в направлении, перпендикулярном диаметральной плоскости судна независимо от работы главных движителей и рулевого устройства.
Подруливающими устройствами оборудовано большое количество судов самого разного назначения. В сочетании с винтом и рулем ПУ обеспечивает высокую маневренность судна, возможность разворота на месте при отсутствии хода, отход или подход к причалу практически лагом.
Рис. 1.38. Подруливающие устройства
В последнее время получила распространение электродвижущаяся система AZIPOD (Azimuthing Electric Propulsion Drive), которая включает в себя дизель-генератор, электромотор и винт (рис. 1.39).

Дизель-генератор, расположенный в машинном отделении судна, вырабатывает электроэнергию, которая по кабельным соединениям передается на электро-мотор. Элетромотор, обеспечивающий вращение винта, расположен в специальной гондоле. Винт находится на горизонтальной оси, уменьшается количество механических передач. Винторулевая колонка имеет угол разворота до 3600, что значительно повышает управляемость судна.
экономия времени и средств при постройке;
уменьшается расход топлива на 10 — 20 %;
уменьшается вибрация корпуса судна;
из-за того, что диаметр гребного винта меньше — эффект кавитации снижен;
отсутствует эффект резонанса гребного винта.
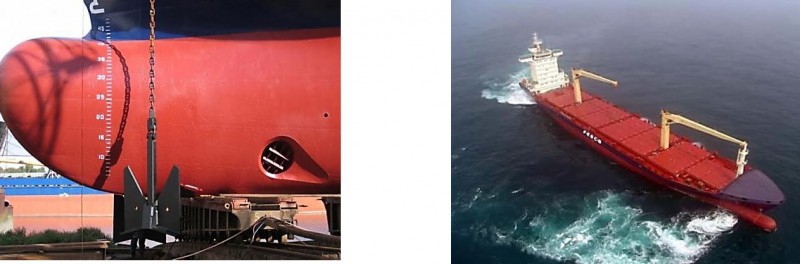
Один из примеров использования AZIPOD — танкер двойного действия (рис. 1.40), который на открытой воде двигается как обычное судно, а во льдах двигается кормой вперёд как ледокол. Для ледового плавания кормовая часть DAT оснащена ледовым подкреплением для ломки льда и AZIPOD.
На рис. 1.41. показана схема расположения приборов и пультов управления: один пульт для управления судном при движении вперед, второй пульт для управления судном при движении кормой вперед и два пульта управления на крыльях мостика.
Рис. 1.40. Танкер двойного действия – Double Acting Tanker (DAT) TEMPERA

Рис. 1.41. Панель управления судна оснащенного двумя модулями AZIPOD

Перед каждым выходом в море рулевое устройство готовят к работе: тщательно осматривают все детали, устраняют обнаруженные неисправности, трущиеся части очищают от старой смазки и смазывают вновь.
Затем под руководством вахтенного помощника капитана проверяют исправность рулевого устройства в действии путем пробной перекладки руля. Перед перекладкой надо убедиться, что под кормой чисто и никакие плавсредства и посторонние предметы не мешают повороту пера руля.
Одновременно проверяют легкость вращения руля и отсутствие даже незначительных заеданий. Во всех положениях пера руля сличается соответствие показаний рулевых указателей и время, затрачиваемое на перекладку.
Румпельное отделение всегда должно быть на замке. Ключи от него хранятся в штурманской рубке и в машинном отделении на специально отведенных постоянных местах, аварийный ключ — у входа в румпельное отделение в запертом шкафчике с застекленной дверцей.
Между ходовым мостиком и румпельным отделением должны быть установлены две независимо действующие линии связи.
По прибытии в порт и по окончании швартовки руль ставят в прямое положение, выключают энергию на рулевой двигатель, осматривают рулевой привод и если все найдено в должном порядке, закрывают румпельное отделение.