Обзор драйвера мотора на L298N
Автор: Сергей · Опубликовано 20.12.2018 · Обновлено 13.04.2020

Одним из самых простых и недорогх способов управления двигателями постоянного тока является модуль L298N Motor Driver с Arduino. Он может контролировать скорость и направление вращения двух двигателей постоянного тока, а так же управлять биполярным шаговым двигателем (типа NEMA 17).
Технические параметры
► Напряжение питания логики модуля: 5 В
► Потребляемый ток встроенной логики: 36 мА
► Напряжение питания драйвера: 5 В – 35 В
► Рабочий ток драйвера: 2 А (пиковый ток 3 А)
► Габариты: 43.5 мм х 43.2мм х 29.4мм
Общие сведения
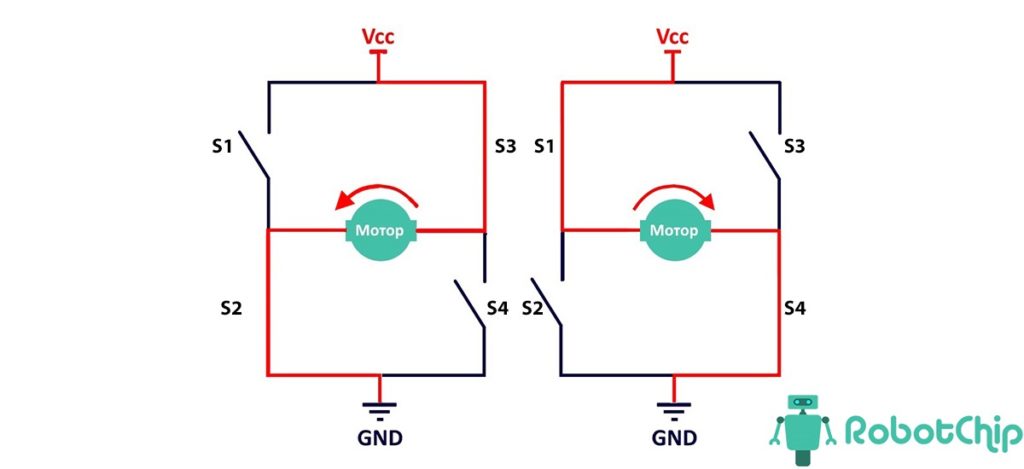
Основной чип модуля это микросхема L298N, состоящая из двух H-мост (H-Bridge), один для выхода A, второй для выхода B. H-мост широко используется в электронике и служит для изменения вращения двигателем, схема H-моста содержит четыре транзистора (ключа) с двигателем в центре, образуя H-подобную компоновку. Принцип работы прост, при одновременном закрытие двух отдельных транзистора изменяется полярность напряжения, приложенного к двигателю. Это позволяет изменять направление вращения двигателя. На рисунке ниже, показана работа H-мостовой схемы.
Для управления скоростью двигателя постоянного тока используется метод PWM (Широтно-импульсной модуляции).
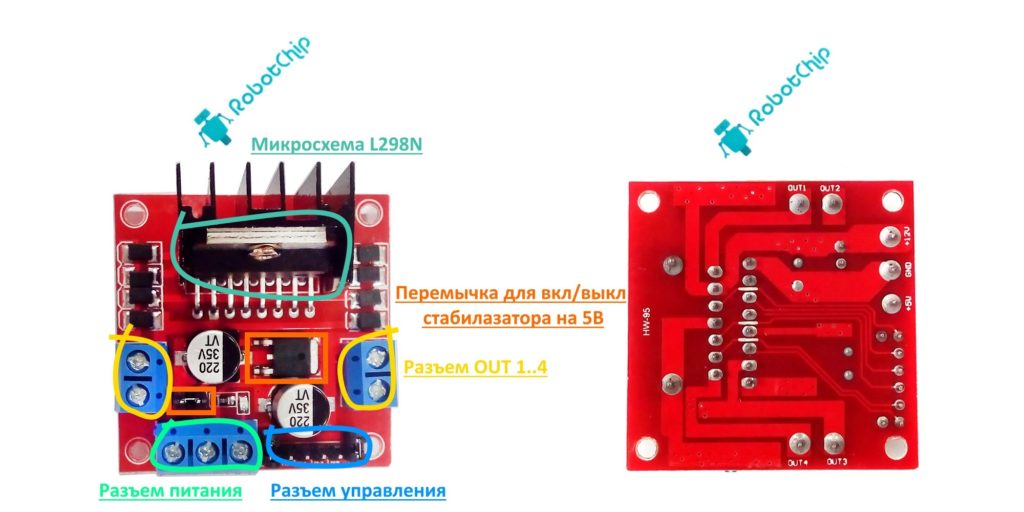
Модуль L298N содержит разъем для подключения питания, ряд перемычек для настройки модуля, два выхода A и B и разъем управления, которые регулируют скорость и направление вращения, назначение каждого можно ознакомится ниже:
► Вывод Vss — питание двигателей, от 5 до 35 В;
► Вывод GND — общий вывод заземления;
► Вывод Vs — питание для логической схемы;
► Перемычка ENA — используются для управления скоростью двигателя A;
► Вывода IN1 и IN2 — используются для управления направлением вращения двигателя A;
► Вывода IN3 и IN4 — используются для управления направлением вращения двигателя B;
► Перемычка ENB — используются для управления скоростью двигателя B;
► Выходы OUT1 и OUT2 — разъем для двигателя A;
► Выходы OUT3 и OUT4 — разъем для двигателя B;
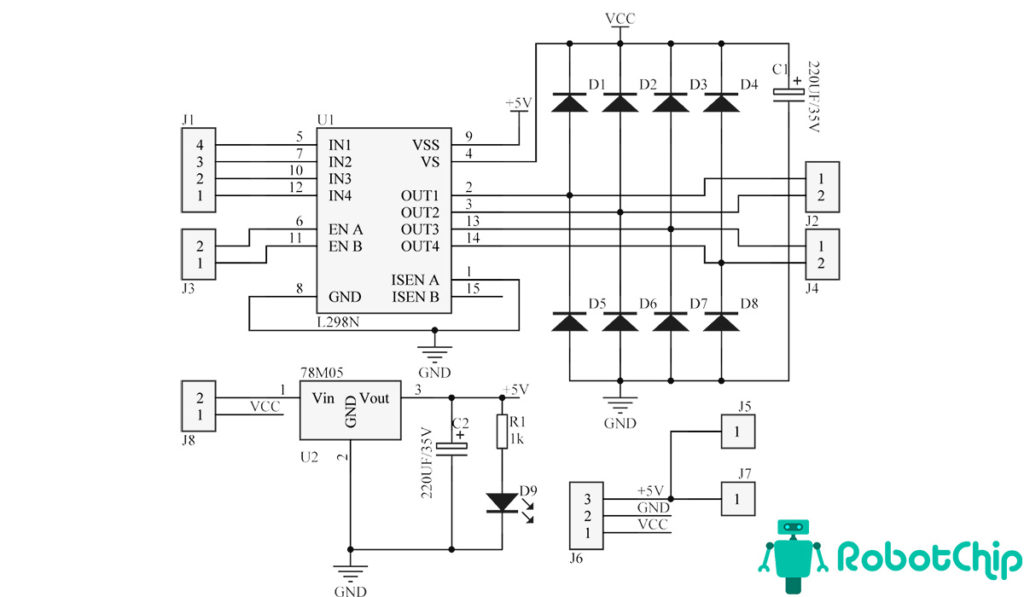
Принципиальная схема модуля L298N
Питание модуля.
Питание модуля L298N осуществляется через трех контактный разъем, шагом 3,5 мм:
► Vs — источник питания двигателей, 3B — 35B
► GND — земля
► Vss — источник питания модуля, 4,5В — 5,5В
Фактически у модуля L298N, есть два контакта питания, а именно. «Vss» и «Vs». От «Vs» питаются двигатели с допустимым напряжением от 5 В до 35 В, а от «Vss» питается логическая схема модуля 4,5В до 5,5В. На плате установлен встроенный стабилизатор напряжения на 5 Вольт (78M05), его можно включить или отключить с помощью перемычки. Когда перемычка установлена, стабилизатор включен и питает логику модуля (Vss) от источника питания двигателя (Vs). При включенном стабилизаторе, вход «Vss» работает как выход и обеспечивает 5В с током 0,5 А. Когда перемычка убрана, стабилизатор отключен и необходимо отдельно подключить питание 5 Вольт на вход Vss.
Внимание! Нельзя установить перемычку, если напряжение двигателя ниже 12 Вольт.

Падение напряжения L298N
Падение напряжения драйвера L298N составляет около 2 В, это связано с внутренним падением напряжения в транзисторах в цепи H-мосте. Таким образом, если мы подключим 12 В к источнику питания двигателя, то двигатели получат напряжение около 10 В. Это означает, что двигатель на 12 В не будет работать с максимальной скоростью, для получения максимальной скорости, напряжение поданное на двигателя должен быть выше напряжения (2 В), чем потребность в фактическом напряжении двигателя. Учитывая падение напряжения на 2 В, если вы используете двигатели 5 В, вам необходимо обеспечить питание 7 В. Если у вас 12-ваттные двигатели, то напряжение питания вашего двигателя должно составлять 14 В.
Управления скоростью
Разъемы управления скоростью ENA и ENB используются для включения и выключения управления скоростью двигателей. Когда перемычка установлена, двигатель вращается с максимальной скоростью. Если необходимо управлять скоростью двигателей, необходимо убрать перемычку и подключить выводы к контактам с поддержкой PWM на Arduino.
Подключение L298N к Arduino (коллекторный двигатель)
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвер мотора на L298N (5-35V, 2A) x 1 шт.
► Коллекторный двигатель x 2 шт.
► Комплект проводов DuPont 2.54 мм, 20 см x 1 шт.
Подключение:
Первым делом необходимо подключить источник питания 12B к двигателям, в примере используется распространенные двигатель постоянного тока, рассчитанные на 3B . . . 12B (применяемые в робототехнике). Учитывая внутреннее падение напряжения на микросхеме L298N, двигатели получат 10 В и будут вращаться не в полную силу.
Далее, нужно подключить 5 вольт на логическую схему L298N, для этого воспользуемся встроенным стабилизатором напряжения, который работает от источника питания двигателя, поэтому, перемычка EN должна быть установлена.
Теперь осталось подключить управляющие провода ENA, IN1, IN2, IN3, IN4 и ENB к шести цифровым выводам Arduino 9, 8, 7, 5, 4 и 3. Обратите внимание, что выводы Arduino 9 и 3 поддерживают ШИМ. Теперь, подключаем двигатели, один к клемме A (OUT1 & OUT2), а другой к клемме B (OUT3 & OUT4). Принципиальная схема подключения приведена ниже.
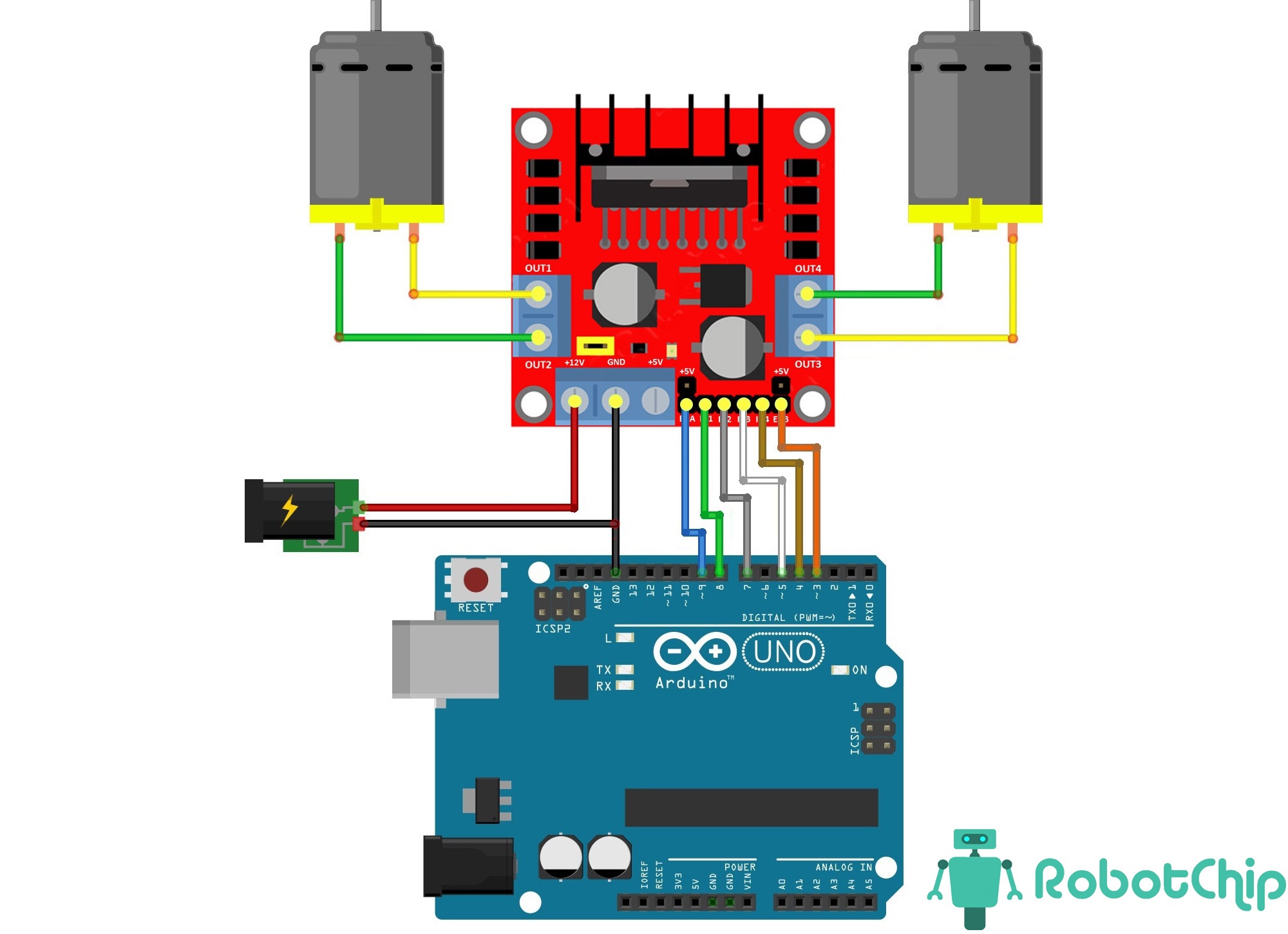
Осталось подключить Arduino к источнику питания и загрузить скетч.
ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ
Блог технической поддержки моих разработок
Драйверы шагового двигателя: униполярный, биполярный, L298N.
Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Ресурсов современных микроконтроллеров вполне хватает для этого даже в самом ”тяжелом” режиме – микрошаговом.
Для подключения шаговых двигателей через слаботочные логические сигналы микроконтроллеров необходимы усилители сигналов – драйверы.
В функцию драйверов входит:
- обеспечение необходимого тока и напряжения на фазных обмотках двигателя;
- коммутация обмоток;
- включение;
- выключение;
- смена полярности;
- защита коммутирующих элементов от напряжения самоиндукции обмоток.
Речь в этой статье идет о простых драйверах, достаточных для большинства приложений. Существуют драйверы с гораздо большими возможностями:
- обеспечение быстрого нарастания тока при включении и быстрого спада при выключении;
- уменьшение тока для фиксации положения остановленного двигателя;
- защитные функции;
- формирование тока и напряжения обмоток для микрошагового режима;
- и многие другие.
Схемы таких драйверов достаточно сложные, а в этих функциях в большинстве приложениях нет необходимости.
По схеме подключения шаговые двигатели делятся на униполярные и биполярные. Драйверы для этих двух вариантов двигателей принципиально отличаются.
Драйвер униполярного шагового двигателя.
В униполярном режиме могут работать двигатели, имеющие следующие конфигурации обмоток.

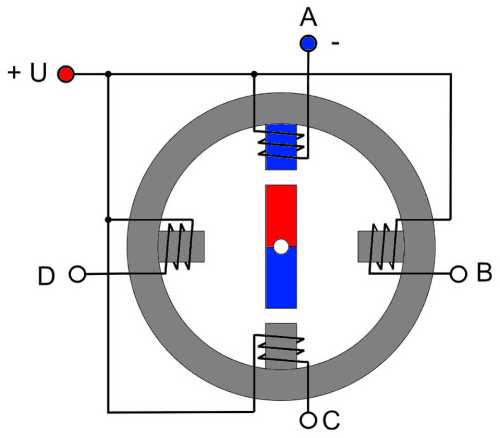
Напомню принцип управления униполярным шаговым двигателем. Четыре обмотки с общим проводом, подключенным к одному полюсу источника питания. Если другие выводы обмоток последовательно коммутировать к другому полюсу источника, то ротор двигателя будет вращаться.
Для коммутации обмоток таким способом достаточно всего четырех ключей, замыкающих обмотки на землю. Схемы коммутации обмоток двух предыдущих вариантов двигателей выглядят так.
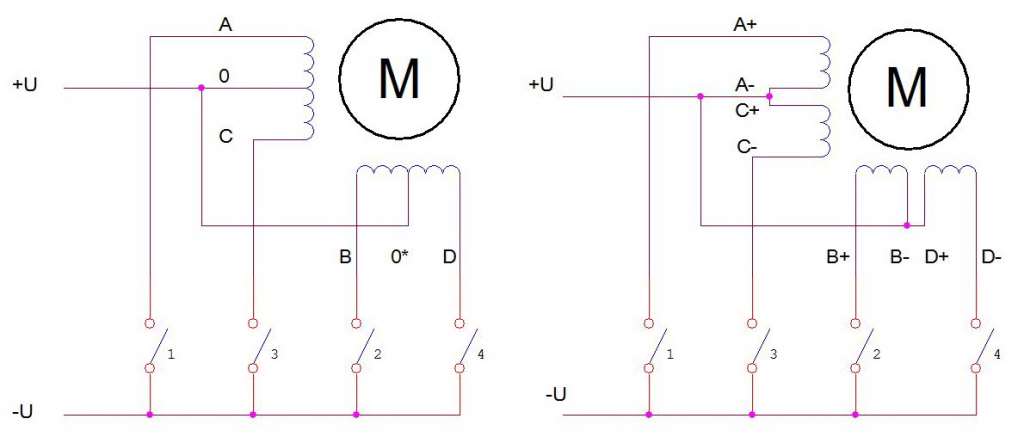
Если последовательно замыкать ключи 1, 2, 3, 4, то ротор двигателя будет вращаться.
Схема драйвера униполярного шагового двигателя.
Практически ключи можно выполнить на биполярных транзисторах, но предпочтительнее использовать низкопороговые MOSFET транзисторы. Я применяю транзисторы IRF7341. Это MOSFET транзисторы с параметрами:
- максимально допустимый ток 4 А;
- предельное напряжение 55 В;
- сопротивление в открытом состоянии 0,05 Ом;
- порог включения 1 В;
- выполнены в миниатюрном корпусе SO-8;
- в корпусе два транзистора.
Крайне удобный вариант для использования в драйвере униполярного шагового двигателя.
- Нет необходимости в радиаторах охлаждения ключей;
- очень низкое падение напряжения на открытом транзисторе;
- малые размеры;
- всего два 8ми выводных корпуса для драйвера двухфазного шагового двигателя.
На биполярных транзисторах ключи с такими параметрами создать не возможно. Есть много других вариантов MOSFET транзисторов для ключей, например IRF7313 ( 6 А, 30 В, 0,029 Ом).
Схема ключа на MOSFET транзисторе для одной фазы выглядит так.
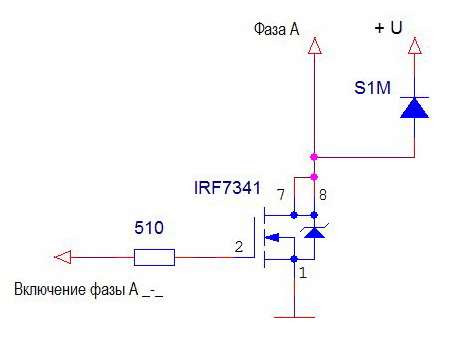
Ключ управляется непосредственно от микроконтроллера логическими уровнями KMOП или TTL ( 0 / +5 В). При управляющем сигнале высокого уровня (+5 В) ключ открыт, и через обмотку фазы идет ток. Диод шунтирует обмотку двигателя в обратном направлении. Он необходим для защиты транзистора от бросков напряжения самоиндукции при выключении фазы. Для управления двигателями на значительных скоростях вращения, лучше использовать высокочастотные диоды, например, FR207.
Вот фрагмент схемы подключения униполярного шагового двигателя к микроконтроллеру.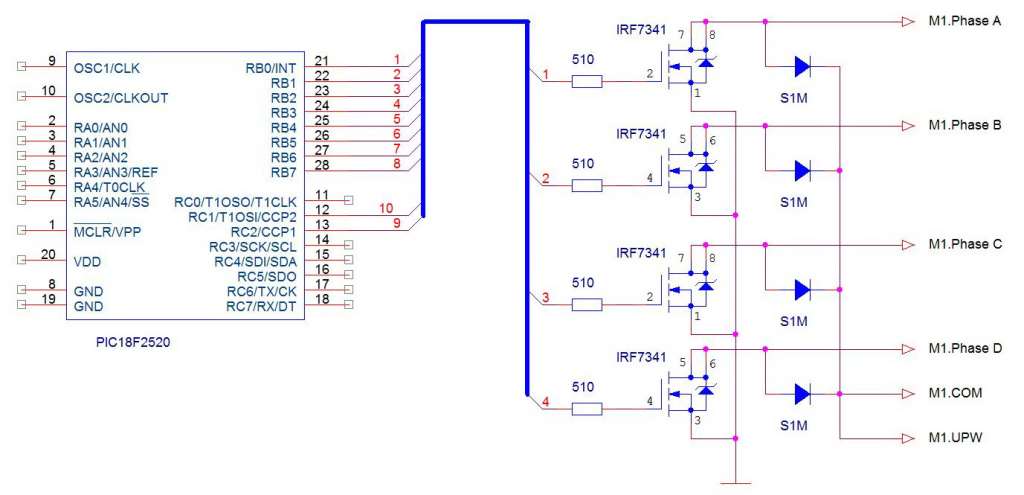
Защиты от коротких замыканий в этой схеме нет. Реализация защиты значительно усложняет драйвер. А замыканий обмоток шаговых двигателей практически не бывает. Я не встречался с таким явлением. Да и на фоне неприятности по поводу сгоревшего дорогого двигателя, замена транзистора не выглядит проблемой.
Кстати, механическое заклинивание вала шагового двигателя не вызывает недопустимых токов в ключах драйвера и защиты не требует.
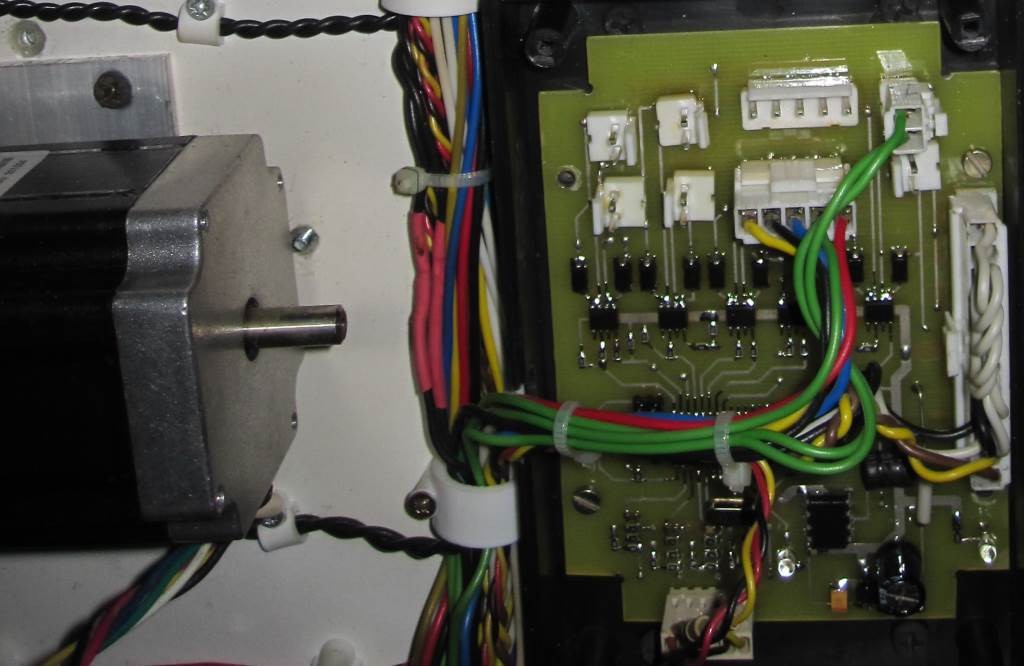
А это изображение платы контроллера униполярного шагового двигателя с PIC контроллером фирмы Microchip.

Простая плата с восьми разрядным микроконтроллером PIC18F2520 управляет:
- двумя шаговыми двигателями с током фазы до 3 А;
- двумя ШИМ ключами для электромагнитов;
- считывает состояние 4х датчиков;
- обменивается данными по сети с центральным контроллером.
Несмотря на простоту контроллера, реализованы следующие режимы управления:
- полно-шаговый, одна фаза на полный шаг;
- полно-шаговый, две фазы на полный шаг;
- полу-шаговый;
- фиксацию положения двигателя при остановке.
К достоинствам управления шаговым двигателем в униполярном режиме следует отнести:
- простой, дешевый, надежный драйвер.
- в униполярном режиме крутящий момент примерно на 40 % меньше по сравнению с биполярным режимом.
Драйвер биполярного шагового двигателя.
В биполярном режиме могут работать двигатели, имеющие любые конфигурации обмоток.
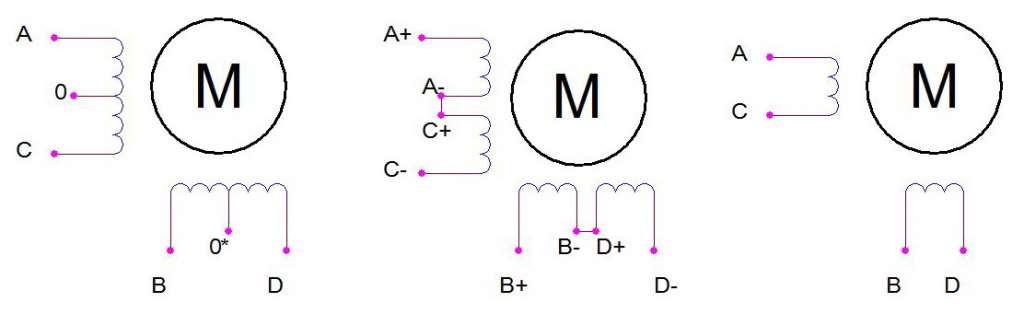
У биполярного двигателя по одной обмотке для каждой фазы. Обычно две обмотки AB и CD. В первых двух вариантах четыре обмотки соединяются так, что получается две. Обмотки по очереди подключаются к источнику питания в одной полярности, затем в другой.
Драйвер биполярного двигателя должен обеспечивать сложную коммутацию. Каждая обмотка:
- подключается в прямой полярности к источнику напряжения;
- отключается от источника напряжения;
- подключается с противоположной полярностью.
Схема коммутации одной обмотки биполярного двигателя выглядит так.
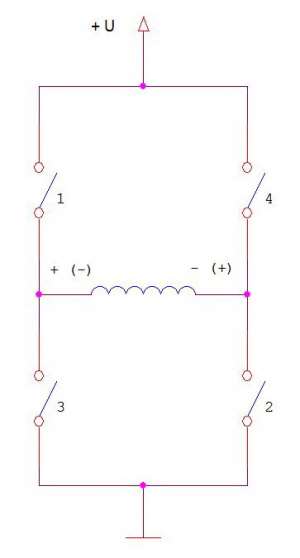
Для обеспечения двух полярных коммутаций от одного источника питания требуется 4 ключа. При замыкании 1 и 2 ключей обмотка подключается к источнику питания в прямой полярности. Замыкание 3 и 4 ключей подает на обмотку обратную полярность напряжения.
Сложность драйвера биполярного шагового двигателя вызвана не только большим числом ключей ( 4 ключа на обмотку, 8 ключей на двигатель), но и:
- сложное управление верхними ключами ( 1 и 4) от логических сигналов “привязанных” к земле;
- проблемы со сквозными токами при одновременном открывании ключей одного плеча ( 1,3 или 2,4).
Сквозные токи могут возникать из-за не одинакового быстродействия нижнего и верхнего ключа. К примеру, нижний ключ уже открылся, а верхний – не успел закрыться.
Схема драйвера биполярного шагового двигателя.
Реализовать схему драйвера биполярного шагового двигателя на дискретных элементах довольно сложно. Могу показать мою схему, которая подключает биполярный двигатель к униполярному драйверу. Эта схема используется для управления биполярными двигателями от контроллера, приведенного в качестве примера в предыдущей главе.

Схема достаточно простая. Проблема сквозных токов решается за счет резисторов 0.22 Ом в коммутируемых цепях. В момент коммутаций MOSFET транзисторов, верхний и нижний ключ оказываются одновременно открытыми на короткое время. Эти резисторы и ограничивают сквозной ток. К сожалению, они ограничивают и рабочий ток двигателя. Поэтому, несмотря на мощные транзисторы, драйвер по такой схеме можно использовать для токов коммутации не более 2 А. Схема не требует диодов для защиты от эдс самоиндукции обмоток, потому что эти диоды интегрированы в MOSFET транзисторы.
Гораздо удобнее и практичнее использовать интегральные драйверы биполярного шагового двигателя. Самым распространенным из них является микросхема L298N.
Драйвер биполярного шагового двигателя L298N.
Описания этой микросхемы на русском языке практически нет. Поэтому привожу параметры L298N достаточно подробно, по официальным материалам производителя этой микросхемы – компании STMicroelectronics (datasheet l298n.pdf).
L298N это полный мостовой драйвер для управления двунаправленными нагрузками с токами до 2 А и напряжением до 46 В.
- Драйвер разработан для управления компонентами с индуктивными нагрузками, такими как электромагниты, реле, шаговые двигатели.
- Сигналы управления имеют TTL совместимые уровни.
- Два входа разрешения дают возможность отключать нагрузку независимо от входных сигналов микросхемы.
- Предусмотрена возможность подключения внешних датчиков тока для защиты и контроля тока каждого моста.
- Питание логической схемы и нагрузки L298N разделены. Это позволяет подавать на нагрузку напряжение другой величины, чем питание микросхемы.
- Микросхема имеет защиту от перегрева на уровне + 70 °C.
Структурная схема L298N выглядит так.
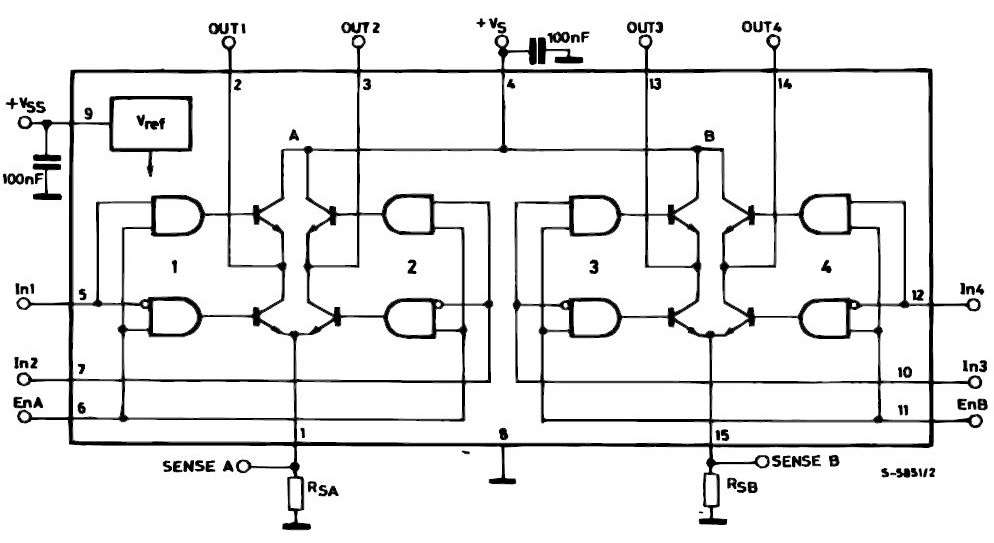
Микросхема выполнена в 15ти выводном корпусе с возможностью крепления радиатора охлаждения.
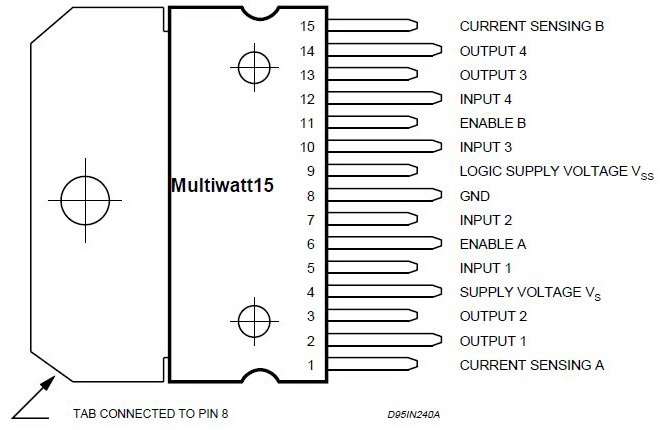
Назначение выводов L298N.
| 1 | Sense A | Между этими выводами и землей подключаются резисторы — датчики тока для контроля тока нагрузки. Если контроль тока не используется, они соединяются с землей. |
| 15 | Sense B | |
| 2 | Out 1 | Выходы моста A. |
| 3 | Out 2 | |
| 4 | Vs | Питание нагрузки. Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 100 нФ. |
| 5 | In 1 | Входы управления мостом A. TTL совместимые уровни. |
| 7 | In 2 | |
| 6 | En A | Входы разрешения работы мостов. TTL совместимые уровни. Низкий уровень сигналов запрещает работу моста. |
| 11 | En B | |
| 8 | GND | Общий вывод. |
| 9 | Vss | Питание логической части микросхемы (+ 5 В). Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 100 нФ. |
| 10 | In 3 | Входы управления мостом B. TTL совместимые уровни. |
| 12 | In 4 | |
| 13 | Out 3 | Выходы моста B. |
| 14 | Out 4 |
Предельно допустимые параметры L298N.
| Обозначение | Параметр | Значение |
| Vs | Напряжение питания | 50 В |
| Vss | Напряжение питания логики | 7 В |
| Vi, Ven | Напряжение логических входов | -0,3. 7 В |
| Io | Выходной ток (для каждого канала)
| |
| Vsens | Напряжение датчиков тока | -1. 2,3 В |
| Ptot | Мощность рассеивания (температура корпуса 75°C) | 25 Вт |
| Top | Рабочая температура кристалла | -25. 130 °C |
| Tstg | Температура хранения | -40. 150 °C |
Параметры расчетов тепловых режимов.
| Обозначение | Параметр | Значение |
| Tth j-case | Тепловое сопротивление кристалл-корпус | 3 ºC/Вт |
| Tth j-amb | Тепловое сопротивление кристалл-окружающая среда | 35 ºC/Вт |
Электрические характеристики драйвера L298N.
| Обозначение | Параметр | Значение |
| Vs | Напряжение питания (вывод 4) | Vih+2.5 . 46 В |
| Vss | Питание логики | 4,5. 5 . 7 В |
| Is | Потребляемый ток покоя (вывод 4)
| |
| Iss | Потребляемый ток покоя (вывод 9)
| |
| Vil | Входное напряжение низкого уровня (выводы 5, 7, 10, 12, 6, 11) | -0,3 . 1,5 В |
| Vih | Входное напряжение высокого уровня (выводы 5, 7, 10, 12, 6, 11) | 2,3 . Vss В |
| Iil | Входной ток низкого уровня (выводы 5, 7, 10, 12, 6, 11) | -10 мкА |
| Iih | Входной ток высокого уровня (выводы 5, 7, 10, 12, 6, 11) | 30 . 100 мкА |
| Vce sat (h) | Напряжение насыщения верхнего ключа
| |
| Vce sat (l) | Напряжение насыщения нижнего ключа
| |
| Vce sat | Общее падение напряжения на открытых ключах
| |
| Vsens | Напряжение датчиков тока (выводы 1, 15) | -1 . 2 В |
| Fc | Частота коммутаций | 25 . 40 кГц |
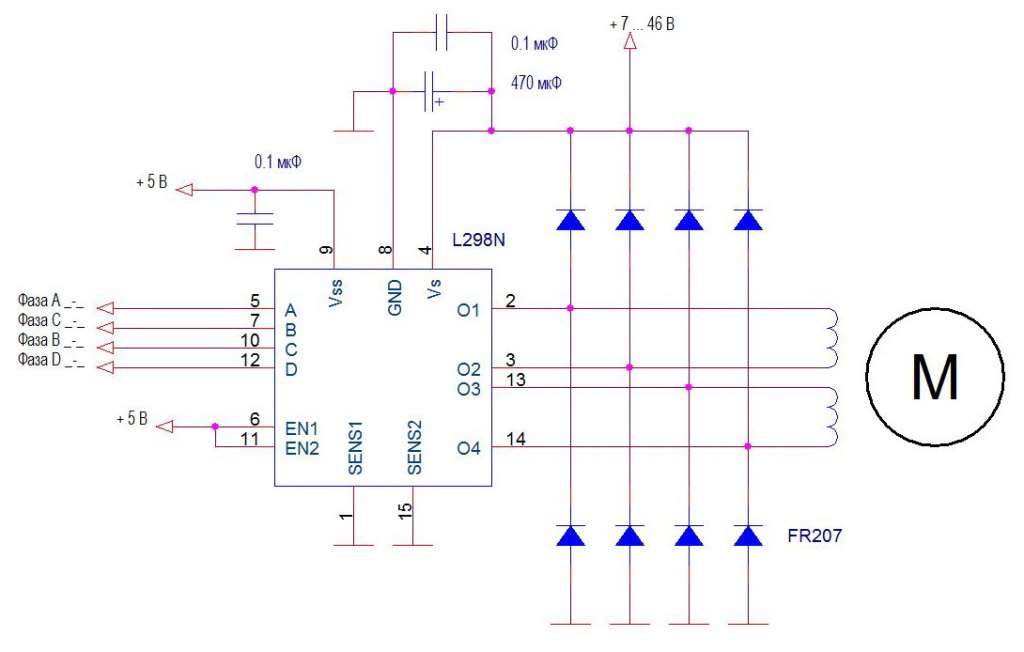
Схема подключения шагового двигателя к микроконтроллеру с помощью драйвера L298N.
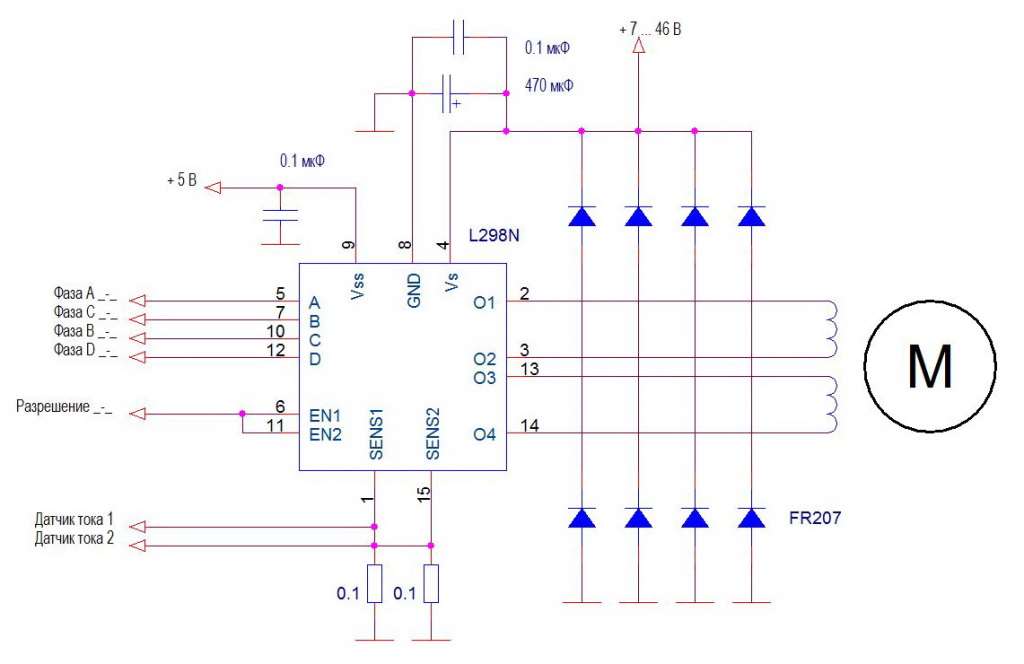
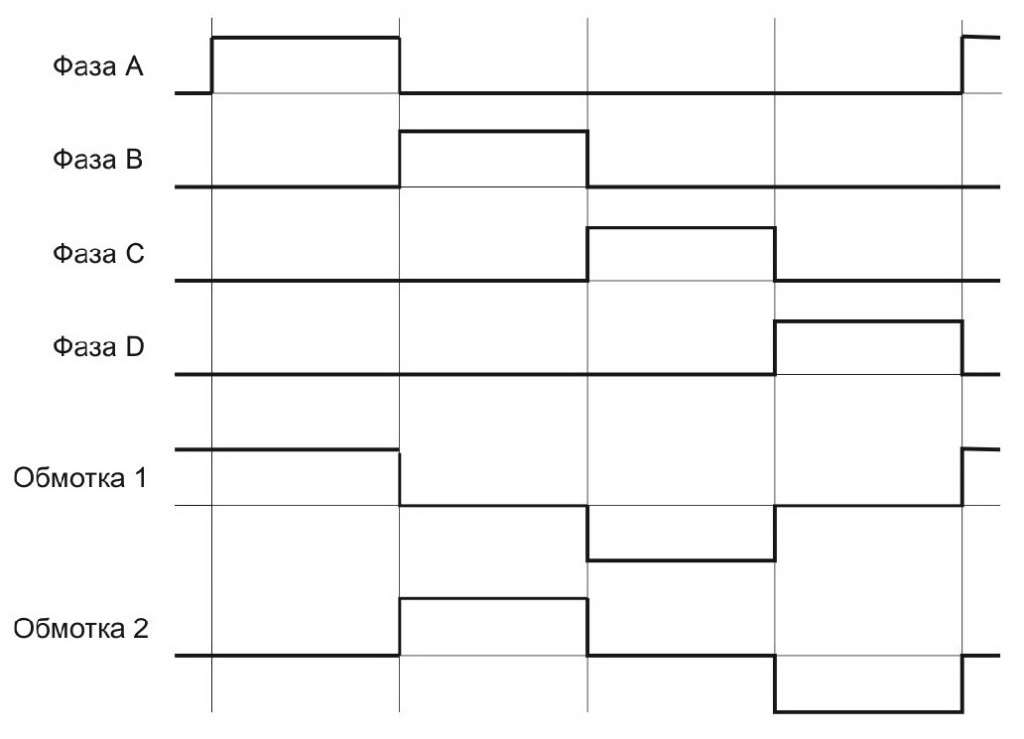
Диаграмма работы этой схемы в полношаговом режиме выглядит так.
Если не используются разрешающие входы и датчики тока, схема выглядит так.
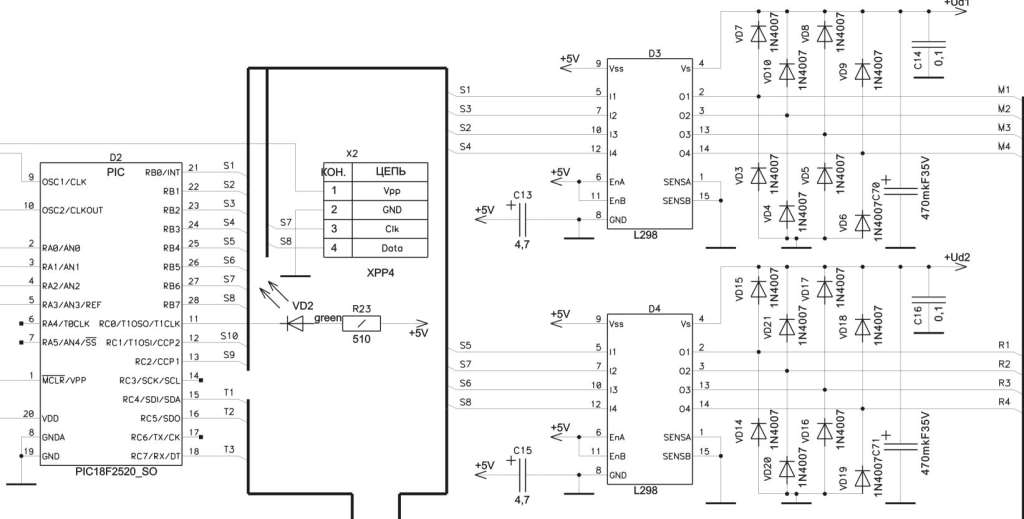
По функциям это аналог контроллера описанного в главе про униполярные двигатели, только для биполярного. Он также собран на PIC контроллере фирмы Microchip и управляет двумя биполярными шаговыми двигателями с током фаз до 2 А. Функциональные возможности и режимы управления двигателем те же.
К достоинствам управления шаговым двигателем в биполярном режиме следует отнести:
- крутящий момент примерно на 40 % больше по сравнению с униполярным режимом.
- можно подключать шаговые двигатели с любой конфигурацией обмоток.