Контроллер для асинхронного двигателя схема
Дельта принтеры крайне требовательны к точности изготовления комплектующих (геометрия рамы, длины диагоналей, люфтам соединения диагоналей, эффектора и кареток) и всей геометрии принтера. Так же, если концевые выключатели (EndStop) расположены на разной высоте (или разный момент срабатывания в случае контактных концевиков), то высота по каждой из осей оказывается разная и мы получаем наклонную плоскость не совпадающая с плоскостью рабочего столика(стекла). Данные неточности могут быть исправлены либо механически (путем регулировки концевых выключателей по высоте), либо программно. Мы используем программный способ калибровки.
Далее будут рассмотрены основные настройки дельта принтера.
Для управления и настройки принтера мы используем программу Pronterface.
Калибровка принтера делится на три этапа:
1 Этап. Корректируем плоскость по трем точкам
Выставление в одну плоскость трех точек — A, B, C (расположенных рядом с тремя направляющими). По сути необходимо уточнить высоту от плоскости до концевых выключателей для каждой из осей.
Большинство (если не все) платы для управления трехмерным принтером (В нашем случае RAMPS 1.4) работают в декартовой системе координат, другими словами есть привод на оси: X, Y, Z.
В дельта принтере необходимо перейти от декартовых координат к полярным. Поэтому условимся, что подключенные к двигателям X, Y, Z соответствует осям A, B, C.(Против часовой стрелки начиная с любого двигателя, в нашем случае смотря на логотип слева — X-A, справа Y-B, дальний Z-C) Далее при слайсинге, печати и управлении принтером в ручном режиме, мы будем оперировать классической декартовой системой координат, электроника принтера сама будет пересчитывать данные в нужную ей систему. Это условность нам необходима для понятия принципа работы и непосредственной калибровки принтера. 
Точки, по которым мы будем производить калибровку назовем аналогично (A, B, C) и позиция этих точек равна A= X-52 Y-30; B= X+52 Y-30; C= X0 Y60. 
Алгоритм настройки:
- Подключаемся к принтеру. (В случае “крагозяб” в командной строке, необходимо сменить скорость COM порта. В нашем случае с 115200 на 250000 и переподключится)

После чего мы увидим все настройки принтера. - Обнуляем высоты осей X, Y, Z командой M666 x0 y0 z0.
И сохраняем изменения командой M500. После каждого изменения настроек необходимо нажать home (или команда g28), для того что бы принтер знал откуда брать отсчет. - Калибровка принтера производится “на горячую”, то есть должен быть включен подогрев стола (если имеется) и нагрев печатающей головки (HotEnd’а) (Стол 60град., сопло 185 град.) Так же нам понадобится щуп, желательно металлический, известных размеров. Для этих задач вполне подойдет шестигранный ключ (самый большой, в нашем случае 8мм, он предоставляется в комплекте с принтерами Prizm Pro и Prizm Mini)
- Опускаем печатающую головку на высоту (условно) 9мм (от стола, так, что бы сопло еле касалось нашего щупа, т.к. высота пока что не точно выставлена.) Команда: G1 Z9.
- Теперь приступаем непосредственно к настройке наших трех точек.
Для удобства можно вместо g- команд создать в Pronterface четыре кнопки, для перемещения печатающей головки в точки A, B, C, 0-ноль.


Далее командой меняем параметры высоты оси Y: M666 Y <посчитанная величина>
M666 Y0.75
M500
G28
2 Этап. Исправляем линзу
После того как мы выставили три точки в одну плоскость необходимо произвести коррекцию высоты центральной точки. Из за особенности механики дельты при перемещении печатающей головки между крайними точками в центре она может пройти либо ниже либо выше нашей плоскости, тем самым мы получаем не плоскость а линзу, либо вогнутую либо выпуклую. 
Корректируется этот параметр т.н. дельта радиусом, который подбирается экспериментально.
Калибровка:
- Отправляем головку на высоту щупа в любую из трех точек стола. Например G1 Z9 X-52 Y-30
- Сравниваем высоту центральной точки и высоту точек A,B,C. (Если высота точек A, B, C разная, необходимо вернутся к предыдущей калибровки.)
- Если высота центральной точки больше остальных, то линза выпуклая и необходимо увеличить значение дельта радиуса. Увеличивать или уменьшать желательно с шагом +-0,2мм, при необходимости уменьшить или увеличить шаг в зависимости от характера и величины искривления (подбирается экспериментально)
- Команды:
G666 R67,7
M500
G28 - Подгоняем дельта радиус пока наша плоскость не выровняется
3 Этап. Находим истинную высоту от сопла до столика
Третьим этапом мы подгоняем высоту печати (от сопла до нижней плоскости — столика) Так как мы считали, что общая высота заведомо не правильная, необходимо ее откорректировать, после всех настроек высот осей. Можно пойти двумя путями решения данной проблемы:
1 Способ:
Подогнав вручную наше сопло под щуп, так что бы оно свободно под ним проходило, но при этом не было ощутимого люфта,
- Командой M114 выводим на экран значение фактической высоты нашего HotEnd’а
- Командой M666 L получаем полное значение высоты (Параметр H)
- После чего вычитаем из полной высоты фактическую высоту.
- Получившееся значение вычитаем из высоты щупа.
Таким образом мы получаем величину недохода сопла до нижней плоскости, которое необходимо прибавить к полному значению высоты и и записать в память принтера командами:
G666 H 235.2
M500
G28
2 Способ:
Второй способ прост как валенок. С “потолка”, “на глаз” прибавляем значение высоты (после каждого изменение не забываем “уходить” в home), добиваясь необходимого значения высоты, но есть шанс переборщить со значениями и ваше сопло с хрустом шмякнется об стекло.
Как сделать авто калибровку для вашего принтера и что при этом авто калибрует принтер вы узнаете из следующих статей.
Отечественный контроллер для асинхронных тяговых моторов

Проект, о котором я говорил, прошел первое испытание. Пока все без корпуса и силовая часть с другого проекта, но главное — заработали «мозги» контроллера с адаптивным векторным контролем. Контроллер умеет сам подстраиваться под конкретный мотор. Силовая часть может быть любая — от относительно слабой на полевиках, до 300-400кВт на IGBT модулях!
По мере поступления информации, буду публиковать в этой теме.
Моторчик на видео — «Славянка» 2П=4 80й габарит на 36В фазных.
Вчера разговаривал с разработчиком по поводу лайт версии — самого дешевого варианта начального уровня. А именно — это будет типа ополовиненного варианта на 65В 300-400А. Получим 9-10кВт в номинале и до 25кВт в разгоне. Вместе с мотором «Славянка» 100го габарита 2П=4 цена комплекта будет менее 2000$ и возможно ближе к 1000$.
основу цены контроллера составляет силовой блок. в нем в настоящий момент 72 ключа по 100 руб (мел.опт) и комплект конденсаторов (с ними как раз пока определенности нет) можно поставить электролиты от epcos они нами проверены, очень надежны, но при токах в 600 а цена на сборку получается от 12 тыс руб… плюс снаберы. короче только «сила» более 20 т.р. плюс шины, радиатор… Себестоимость мозга менее 200 у.е включая энкодер. В настоящий момент ищу вариант бюджетной замены epcos у . Есть идеи, но они требуют проверки, будет печально если в машине под нагрузкой кондюки начнут стрелять… Схемы мозгов в общем доступе не будет (прошу извинить и понять) .
Режим обучения- это первоначальная функция, необходимая при «встрече» контроллера и мотора. Нужна каждый раз при смене типа двигателя. ( в этом режиме контроллер определяет все необходимые параметры для работы с данным двигателем, необходим внешний девайс)
обсуждение
добрый день! как успехи с контроллером, будут ли варианты для продажи
Последнее сообщение от разработчиков было ещё в 2015г:
Ответ от разработчика:
Надеялись, что забыли! 😀 С контроллером ситуация неоднозначная! С одной стороны он подготовлен к мелкосерийному выпуску, с другой принято решение пока его попридержать. Причин этому решению несколько, но главная — экономика! Имеет смысл стартовать если есть заказчик на мало мальскую партию, причем поднадзорную! Что бы можно было вычищать эксплуатационные баги и при этом в трубу не вылететь. С другой стороны навалилась куча коммерческих заказов. Все вдруг вспомнили про необходимость импортозамещения. Под этим соусом сделали версию контроллера на мопах. Может она теперь перегонит своего старшего брата… 🙂 Но пока все для внутреннего использования. Просьба особо не пинать за обрушенные ожидания… К сожалению мы все сильно зависим от окружающих обстоятельств.
Любая электрохрень в сравнении даже с откровенно китаяйцуевыми двухтактниками проигрывает во всем. Масса,удельная мощность,эксплуатационные характеристики,и конечно же-ЦЕНА.
Если даже брать промышленно серийное тесло,то при ее стоимости от $70000,
все $45000 приходятся именно на акб. Остаются $25000,за которые можно взять более чем приличный двс автомобиль. При этом же,на $45000 можно накупить до 45000/0,6=75000. литров топлива. при среднем расходе в 7,5л/100км,это же (75000/7,5)*100=1000000 км…МИЛЛИОН километров пробега.
Этого хватит в среднем,не менее, чем на 50,а то и на все 100 лет беззаботной езды с ветерком.
За 25тыс. приличный бензиновый автомобиль, класса Теслы не купишь. Ближайший аналог стоит 45тыс. Человек, ездящий на электромобиле не заморачивается на количестве пройденных километров. Ведь они идут практически даром. Я, например, в год выезжаю по 50тыс.км. Мне Тесла окупится за 10 лет. Это её гарантийный период. ГАРАНТИЙНЫЙ, господа. За такую гарантию Ройл-ройз берёт по 100тыс. зелёными!
И вообще, Мазертти и Порш покупают не для экономии! 😀 Возьмите машины, которые берут именно для экономии. Например, Ниссан Лиф за 12тыс.$. Каждый 100км на нём стоят 1$. Это и электроэнергия и амортизация аккумуляторов. На бензине 100км. стоят не менее 7$. 6$ чистой экономии каждые 100км, господа. ЧИСТОЙ ЭКОНОМИИ, во всех смыслах этой фразы! Итого Лиф окупается за 3-4 года.
здравствуйте как обстоит дела с контроллером на ассинхроник ,он есть в продаже ,спасибо за ответ.
Векторное управление для асинхронного электродвигателя «на пальцах»

В предыдущей статье «Векторное управление электродвигателем «на пальцах» рассматривалась векторная система управления для синхронных электродвигателей. Статья получилась большой, поэтому вопрос про асинхронные электродвигатели (induction motors) был вынесен в отдельную публикацию. Данная статья является продолжением предыдущей и опирается на приведенные там объяснения принципов работы электродвигателей. Она расскажет об особенностях работы асинхронного двигателя применительно к векторному управлению, а также покажет отличия в структуре векторной системы управления между синхронной и асинхронной машиной.
Как работает асинхронный электродвигатель? Наиболее популярное объяснение говорит что-то типа «статор создает вращающееся магнитное поле, которое наводит ЭДС в роторе, из-за чего там начинают течь токи, в результате ротор увлекается полем статора и начинает вращаться». Лично я от такого объяснения всю физику процесса понимать не начинаю, поэтому давайте объясню по-другому, «на пальцах».
Все же видели видео, как магнит взаимодействует с медным цилиндром? Особенно обратите внимание на диапазон времени с 0:49 до 1:03 – это уже самый настоящий асинхронный двигатель:
Эффект происходит из-за появления в цилиндре вихревых токов. Согласно закону электромагнитной индукции, открытого Майклом Фарадеем, при изменении магнитного потока замкнутого контура в нем возникает ЭДС (по-простому считайте, что напряжение). Эта ЭДС, применительно к медному цилиндру, тут же вызывает появление в цилиндре тока. При этом этот ток тоже создает свой, ответный магнитный поток, направленный ровно в противоположную сторону от изменения потока магнита, который мы подносим:
Индукционный ток, возникающий в замкнутом проводящем контуре, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток.
Это можно понимать так, что замкнутый контур сопротивляется изменению магнитного потока внутри себя. Если вы резко поднесёте магнит к медному цилиндру, т.е. сделаете резкое изменение магнитного потока, то в цилиндре потекут такие ответные токи, что магнитное поле внутри цилиндра в первый момент времени будет равно нулю: магнитное поле поднесенного магнита будет полностью скомпенсировано магнитным полем токов цилиндра (с допущениями, конечно). Если магнит поднести и держать, то токи в цилиндре из-за наличия активного сопротивления меди постепенно спадут, а поле цилиндра, создаваемое его токами, пропадет: магнитный поток постоянного магнита «прорвется» внутрь цилиндра, как будто никакого цилиндра и нет. Но стоит попытаться убрать магнит, как цилиндр отреагирует снова – теперь он будет пытаться сам «воссоздать» внутри себя пропадающий магнитный поток, т.е. будет опять сопротивляться изменению магнитного потока, в данном случае его исчезновению. Но что значит «воссоздать магнитный поток»? Это значит, что на какое-то время медный цилиндр можно считать условно «постоянным магнитом» – в нем циркулирует вихревой ток, создающий магнитное поле (на этом же принципе «висят» сверхпроводники в магнитном поле, но это совсем другая история).
Давайте теперь обратимся к конструкции асинхронного двигателя. Ротор асинхронного двигателя условно можно представлять себе также в виде медного цилиндра. Но в реальных конструкциях это некая решётка в виде «беличьей клетки» (рисунок 1) из меди или алюминия, совмещенная с магнитопроводом (шихтованное железо).
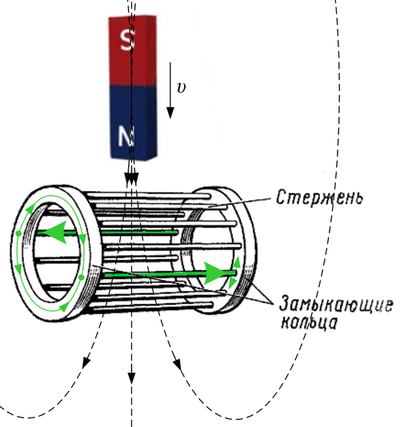
Рисунок 1. Ротор асинхронного двигателя типа «беличья клетка» с током в одной из «рамок» беличьей клетки, реагирующей на нарастание внешнего магнитного поля.
На рисунке схематично показано протекание тока в одной из «рамок», т.е. в некоторых прутьях беличьей клетки, если сверху поднести магнит (создать ток в статоре). На самом деле ток в этом случае протекает во всех прутьях, кроме, условно, верхнего и нижнего, для которых изменения потока нет (но они бы среагировали на горизонтально поднесенный магнит).
Помните ещё из начала прошлой статьи картинку со схематическим изображением двухфазной синхронной машины, где ротором был магнит? Давайте теперь сделаем из неё асинхронный двигатель: вместо магнита поставим две перпендикулярные короткозамкнутые катушки, символизирующие медный цилиндр ротора (рисунок 2).
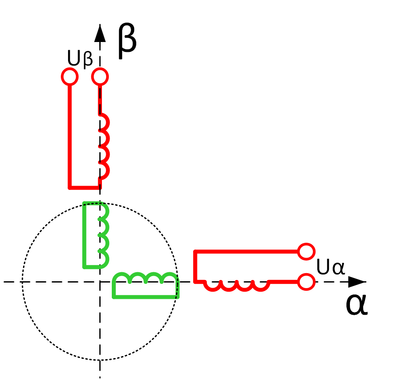
Рисунок 2. Схематическое изображение двухфазного асинхронного двигателя с короткозамкнутым ротором.
Замена цилиндра на две катушки для пояснения принципа работы (или моделирования) корректна, точно также как корректна замена трехфазной обмотки на двухфазную. Только в этом случае мы заменяем… «бесконечнофазную обмотку» цилиндра (бесконечное число рамок) на две катушки с эквивалентной индуктивностью и сопротивлением. Ведь двумя катушками можно создать точно такой же вектор тока и магнитного потока, как и цилиндром.
А теперь давайте сделаем на короткое время из асинхронной машины синхронную. Подадим в катушку оси β постоянный ток и подождем секунды две-три, пока в роторе перестанут течь ответные токи: «поднесем внешний магнит». То есть дождемся спадания токов в роторе, чтобы магнитное поле статора «пронзило ротор» и никто ему не мешал. Что теперь будет, если выключить ток в статоре? Правильно, на те же две-три секунды, пока ток ротора этому противится, мы из ротора получим «обычный магнит» (рисунок 3).
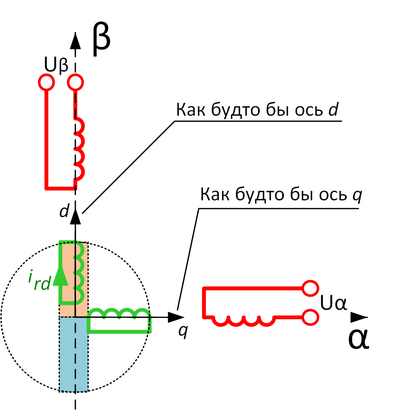
Рисунок 3. Асинхронный двигатель, когда только что выключили постоянный ток по фазе β – течет ток в роторе ird.
Что же мы ждем? Быстрее, пока магнит не пропал, рисуем вдоль него привычную ось d (как в синхронной машине) и перпендикулярную ей ось q, привязанные к ротору. Включаем структуру векторного управления синхронной машиной, подаем ток по оси q, создавая момент, поехали!
Так можно даже действительно сделать несколько оборотов, пока наш сахарный магнит не растаял, а ось d не ушла в небытие. Что же делать? Давайте не будем выключать ток по оси d, подпитывая наш магнит! И опять же сохраним структуру векторного управления синхронной машиной, просто подав задание по оси d (раньше там был ноль). Итак, смотрим на рисунок 4: оси d, q по датчику положения «приделаны» к ротору, двигатель стоит, подан ток по оси d в статоре, что в данном случае для стоячей машины совпадает с осью β. Тока по оси q пока нет: ждем, пока ротор «намагнитится». И вот подаем ток isq (s – статор)! Поехали!
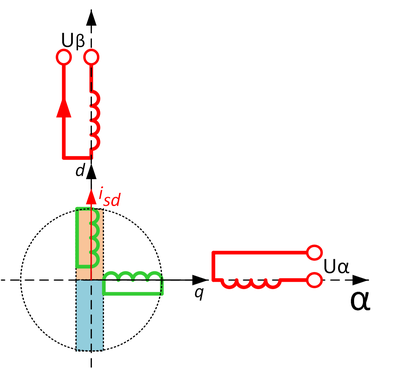
Рисунок 4. Подадим ток в ось d, намагнитив машину, подготовив всё для подачи тока в ось q статора.
Далеко ли мы уедем таким методом барона Мюнхгаузена? К сожалению, нет. Смотрите, что произошло (рисунок 5):
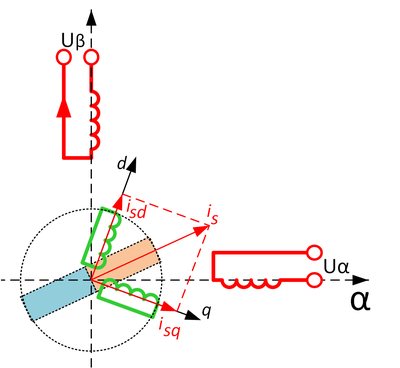
Рисунок 5. А магнит-то сполз!
Двигатель начал крутиться, но через некоторое время после того, как мы подали ток в ось q, образовав суммарный ток is и «прибив» этот вектор к положению ротора, магнит в роторе «съехал»! И встал ровно вдоль вектора is. Ротор же не понимает, где мы нарисовали ему оси d, q… Ему все равно, крутился он или нет. Важно, что его внутренний «наведенный магнит» в конечном счете хочет стать сонаправленным с магнитным потоком статора, «подчиниться» внешнему потоку. Из-за съехавшего магнита двигатель перестанет крутиться: мало того, что между магнитом ротора и током iq нет желаемых 90 градусов, так еще и ток оси d теперь его тянет в противоположную сторону, компенсируя момент, создаваемый током iq. Метод барона Мюнхгаузена не удался.
Что же делать с ускользающим магнитом ротора? А давайте сделаем структуру векторного управления асинхронного двигателя не в осях d,q, приделанных к ротору, а в других осях, приделанных именно к текущему положению «магнита ротора» – назовем их оси x,y, чтобы отличать от d,q. По «научному» – это оси, ориентированные по потокосцеплению ротора. Но как же узнать, где конкретно сейчас это потокосцепление ротора, т.е. куда повернут магнит в роторе? Его положение зависит… во-первых, от положения самого ротора (датчик положения у нас есть, хорошо), во-вторых, от токов статора (создающих поток статора, по которому и собирается в конечном счете повернуться магнит ротора), а в-третьих от параметров роторной цепи – индуктивности и сопротивления «медного цилиндра» (он же беличья клетка, он же роторная обмотка, он же цепь ротора). Поэтому… зная всё это, положение «магнита» ротора можно просто вычислять по нескольким дифференциальным уравнениям. Делает это так называемый наблюдатель потокосцепления ротора, выделенный цветом на итоговой структурной схеме векторного управления асинхронным двигателем (рисунок 6).
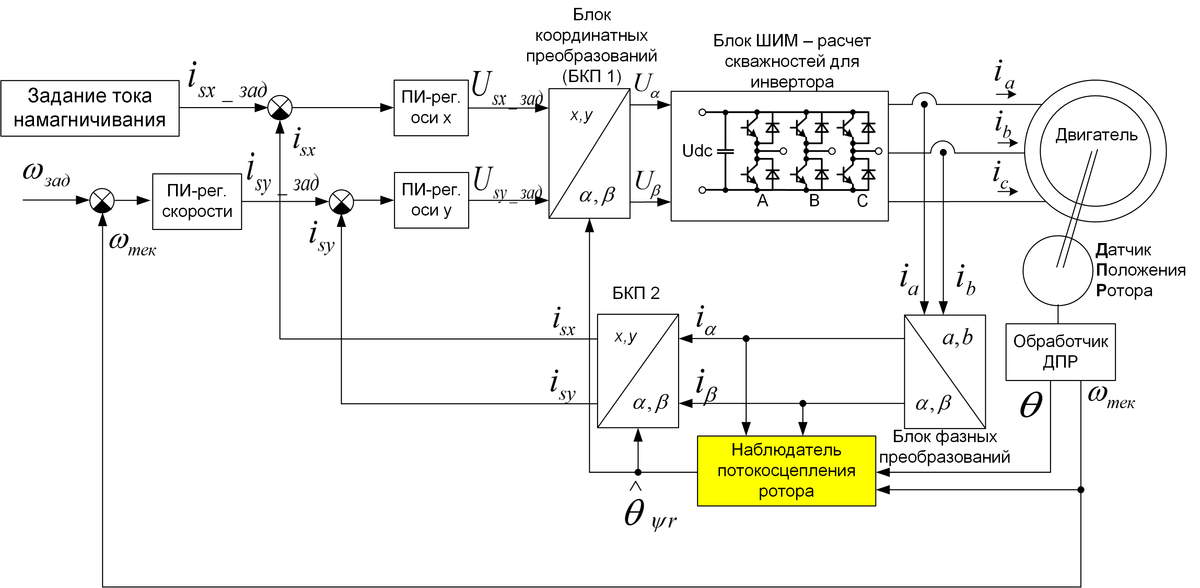
Рисунок 6. Векторная датчиковая структура управления асинхронным двигателем
В наблюдатель заводятся показания с датчика положения ротора, а также текущие токи статора в осях α, β. На выходе наблюдателя – положение «магнита» ротора, а именно угол наблюдаемого потокосцепления ротора  . В остальном структура полностью аналогична таковой для синхронной машины, только оси d,q переименованы в x,y, а на ось x подано задание тока, который будет поддерживать наш «магнит» в роторе. Также на многих обозначениях добавлен индекс “s”, чтобы показать, что данная величина имеет отношение к статору, а не к ротору. Также надо отметить, что в западной литературе не используют оси x,y: у них ось d всегда направлена по полю ротора, что для асинхронного двигателя, что для синхронного. Наши ученые еще в советское время разделили оси d,q и x,y, чтобы исключить путаницу: d,q прикреплены к ротору, а x,y к полю ротора.
. В остальном структура полностью аналогична таковой для синхронной машины, только оси d,q переименованы в x,y, а на ось x подано задание тока, который будет поддерживать наш «магнит» в роторе. Также на многих обозначениях добавлен индекс “s”, чтобы показать, что данная величина имеет отношение к статору, а не к ротору. Также надо отметить, что в западной литературе не используют оси x,y: у них ось d всегда направлена по полю ротора, что для асинхронного двигателя, что для синхронного. Наши ученые еще в советское время разделили оси d,q и x,y, чтобы исключить путаницу: d,q прикреплены к ротору, а x,y к полю ротора.
Что же получается? Магнит ротора всё время скользит, сползает от текущего положения на роторе в сторону тока оси y. Чем больше этот ток, тем сильнее скольжение. Наблюдатель в реальном времени вычисляет положение этого магнита и «подкручивает» оси x,y всё время вперед по отношению к осям d,q (положению ротора). Ось x всегда соответствует текущему положению потокосцепления в роторе – положению «магнита». Т.е. оси x,y бегут всегда (в двигательном режиме) немного быстрее вращения ротора, компенсируя скольжение в нем. Токи в роторе, если их измерить или промоделировать, получаются синусоидальными. Только изменяются они не с частотой статорных токов, а с частотой этого скольжения, т.е. очень медленно. Если в статоре промышленного асинхронника 50Гц, то при работе под нагрузкой частота тока в роторе – единицы герц. Вот, собственно, и весь секрет векторного управления для асинхронного двигателя.
Чем векторное управление асинхронным двигателем лучше, чем скалярное? Скалярное управление это такое, когда к двигателю прикладывается напряжение заданной частоты и амплитуды – например, 380В 50Гц. И от нагрузки на роторе оно не зависит – никаких регуляторов токов, векторов… Просто задается частота напряжения и его амплитуда – скалярные величины, а токи и потоки в двигателе пусть сами себе удобное место находят, как хотят. В установившемся режиме работы двигателя векторное управление неотличимо от скалярного – векторное точно также будет прикладывать при номинальной нагрузке те же, скажем, 380В, 50Гц. Но в переходных режимах… если нужно быстро запустить двигатель с заданным моментом, если нужно отрабатывать диаграмму движения, если есть импульсная нагрузка, если нужно сделать генераторный режим с определенным уровнем мощности – всё это скалярное управление или не может сделать, или делает это с отвратительными, медленными переходными процессами, которые могут к тому же «выбить защиту» преобразователя частоты по превышению тока или напряжения звена постоянного тока (двигатель колеблется и может запрыгивать в генераторный режим, к которому преобразователь частоты не всегда приспособлен).
В векторной же структуре «всё под контролем». Момент вы задаете сами, поток тоже. Можно ограничить их на нужном уровне, чтобы не превысить уставок защиты. Можно контролируемо форсировать токи, если кратковременно нужно сделать в несколько раз больший момент. Можно регулировать не только момент двигателя, но и поток (ток оси x): если нагрузка на двигателе мала, то нет никакого смысла держать полный поток в роторе (делать магнит «номинального режима») – можно ослабить его, уменьшив потери. Можно стабилизировать скорость регулятором скорости с высокой точностью и быстродействием. Можно использовать асинхронный привод в качестве тягового (в транспорте), задавая требуемый момент тяги. В общем, для сложных применений с динамичной работой двигателя векторное управление асинхронным двигателем незаменимо.
Также есть отличительные особенности векторного управления асинхронного двигателя от синхронного. Первая – это датчик положения. Если для синхронного привода нам нужно знать абсолютное положение ротора, чтобы понять, где магнит, то в асинхронном приводе этого не требуется. Ротор не имеет какой-то выраженной полюсной структуры, «магнит» в нем постоянно скользит, а если посмотреть в формулы наблюдателя потокосцепления ротора, то там не требуется знания положения: в формулы входит только частота вращения ротора (на самом деле есть разные формулы, но в общем случае так). Поэтому на датчике можно сэкономить: достаточно обычного инкрементального энкодера для отслеживания частоты вращения (или даже тахогенератора), абсолютные датчики положения не требуются. Вторая особенность – управление потоком в асинхронном электродвигателе. В синхронной машине с постоянными магнитами поток не регулируется, что ограничивает максимальную частоту вращения двигателя: перестает хватать напряжения на инверторе. В асинхронном двигателе, когда это случается… просто уменьшаете задание по оси x и едете дальше! Максимальная частота не ограничена! Да, от этого будет снижаться момент двигателя, но, главное, ехать «вверх» можно, в отличие от синхронной машины (по-правде там тоже можно, но недалеко, не для всех двигателей и с кучей проблем).
Точно также существуют бездатчиковые алгоритмы векторного управления асинхронным двигателем, которые оценивают угол потокосцепления ротора не используя сигнал датчика положения (или скорости) вала ротора. Точно также, как и для синхронных машин, в работе таких систем есть проблемы на низкой частоте вращения ротора, где ЭДС двигателя мала.
Также следует сказать пару слов о роторе. Если для промышленных асинхронных двигателей его удешевляют, используя алюминиевую беличью клетку, то в тяге, где массогабаритные показатели важнее, наоборот, могут использовать медный цилиндр. Так, во всеми любимом электромобиле Tesla стоит именно асинхронный электродвигатель с медным ротором (рисунок 7)

Рисунок 7. Ротор асинхронного электродвигателя Tesla Model S в стальной обшивке (фото из разных источников за разные годы)
Вот, собственно, и всё, что я хотел сказать про асинхронный двигатель. В данной обзорной статье не рассмотрены многие тонкости, такие как регулятор потока ротора, возможное построение векторной структуры в других осях координат, математика наблюдателя потокосцепления ротора и многое другое. Как и в конце прошлой статьи, за дальнейшими подробностями отсылаю читателя к современным книгам по приводу, например к «Анучин А. С. Системы управления электроприводов. МЭИ, 2015».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в статье «Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье «Способы отладки ПО микроконтроллеров в электроприводе». Также наша фирма ООО «НПФ Вектор» предлагает разработку на заказ систем управления электродвигателями и другим электрооборудованием, примеры выполненных проектов можно посмотреть на нашем сайте.