Терминология мехатроники
К настоящему времени предложено несколько определений, уточняющих первоначальное значение термина «мехатроника». Авторами учебника сформулированы следующие два определения современных представлений о мехатронике [5,6].
Мехатроника – наука о механических, энергетических и информационных процессах и их системном взаимодействии в машинах с микропроцессорным управлением (мехатронных объектах), а так же о процессах их взаимодействия с внешней средой при выполнении технологических функций.
Мехатроника – область техники, обеспечивающая реализацию жизненного цикла (разработку, изготовление, эксплуатацию) мехатронных объектов, вплоть до интеллектуальных машин.
В федеральном государственном образовательном стандарте приведено следующее определение:
Мехатроника – область науки и техники, основанная на системном объединении узлов точной механики, датчиков состояния внешней среды и самого объекта, источников энергии, исполнительных механизмов, усилителей, вычислительных устройств (ЭВМ и микропроцессоры).
В мехатронике используются такие современные технологии как:
· технологии разработки, изготовления микросхем, БИС, СБИС, микропроцессоров, микроЭВМ и специализированных контроллеров в интегральном исполнении;
· технологии информационных систем (получение информации, ее обработка, ввод в процессорные СУ, цифровая обработка и т.д.).
· технологии моделирования, как метода создания, так и одного из аспектов функционирования мехатронной системы (МС);
В целом мехатроника – системный комплекс средств и принципов механики, электроники и информатики, синтез передовых технологий и технических решений, эффективно используемых для достижения конкретных целей при создании современных машин.
Предметом мехатроники являются процессы проектирования и производства модулей, машин и систем для реализации заданных функциональных движений.
Функциональное движение мехатронной системы предусматривает ее целенаправленное механическое перемещение, которое координируется с параллельно управляемыми технологическими и информационными процессами. Таким образом, понятие «движение» трактуется в данном определении мехатроники расширительно. Но все-таки основой функциональных движений в мехатронике служит механическое перемещение системы в пространстве и во времени. Требования к показателям качества исполнения функциональных движений (по точности, скорости и т.д.) определяются служебным назначением машины.
Метод мехатроники основан на системном сочетании таких ранее обособленных естественно-научных и инженерных направлений, как точная механика, микроэлектроника, электротехника, компьютерное управление и информатика. Основой метода мехатроники является синергетическая интеграция структурных элементов, технологий, энергетических и информационных процессов на всех этапах жизненного цикла изделия, начиная со стадии его концептуального проектирования и заканчивая производством и эксплуатацией.
Синергия (греч.) – это совместное действие, направленное на достижение общей цели. В мехатронике все энергетические и информационные потоки направлены на достижение единой цели – выполнить программное движение с заданными показателями качества.
При синергетическом объединении достигается результат больший, чем арифметическая сумма вкладов отдельных частей системы. Элементы мехатронных модулей и машин имеют различную физическую природу, что определяет междисциплинарную сущность предмета мехатроники и ее научно-техническую проблематику. При синергетической интеграции компоненты мехатронной системы должны быть слиты неразрывно и органически – именно так трактовалось это понятие в исторически первом определении мехатроники, в буквальном переводе с японского языка.
Исполнительный орган – функциональная часть мехатронного устройства, предназначенная для выполнения действий по сигналам системы управления.
Рабочий орган мехатронной машины – это составная часть механического устройства для непосредственного выполнения технологических операций и/или вспомогательных переходов.
Примеры рабочих органов в робототехнике: механические схваты, вакуумные и электромагнитные захватные устройства, сварочные клещи (для точечной сварки), инструментальные головки для механообработки и лазерных операций, окрасочный пистолет. Таким образом, рабочий орган – это управляемый модуль, который может иметь несколько степеней подвижности и состоять из нескольких элементов.
Рабочая зона мехатронной машины – совокупность всех точек декартового пространства, которые могут быть достигнуты рабочим органом машины.
Мехатронная система— множество механических, микропроцессорных, электронных и электротехнических компонентов, находящихся в связях друг с другом, образующих определенную целостность, единство.
В состав мехатронной системы входят 4 основные части:
— механическое устройство, конечным звеном которого является рабочий орган;
— блок приводов, включающих в себя силовые преобразователи и исполнительные двигатели;
— информационное устройство, предназначенное для получения и передачи в устройство компьютерного управления данных о реальном движении и фактическом состоянии мехатронной системы;
— устройство компьютерного управления, на вход которого поступают команды человека-оператора, либо ЭВМ верхнего уровня.
Мехатронный объект – предмет (изделие), представляющий собой машину с компьютерным управлением как мехатронную систему устройств, самостоятельно функционирующую в соответствии с целевым назначением.
Общая классификация мехатронных объектов[5] приведена на рис 1.1.
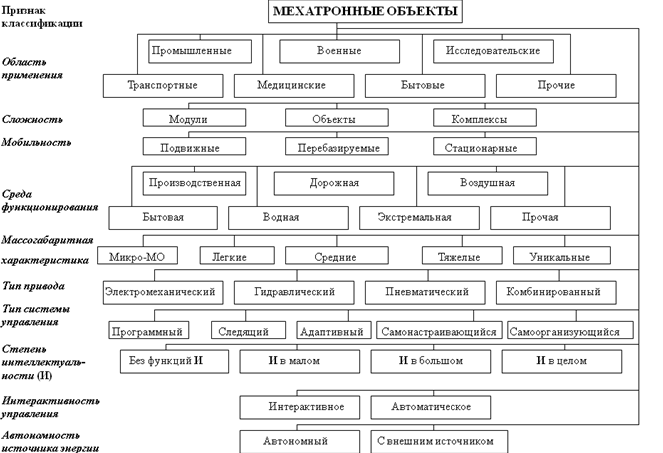
Рис.1.1. Классификация мехатронных объектов.
Мехатронный комплекс – совокупность связанных между собой мехатронных объектов, предназначенная для осуществления действий, определяемых общим целевым назначением.
Мехатронные объекты являются многомерными системами, которые компонуются на базе двух или более мехатронных модулей.
Мехатронный модуль – это функционально и конструктивно самостоятельное изделие, предназначенное для реализации движений, с программно-аппаратной интеграцией составляющих его устройств, имеющих различную физическую природу.
Мехатронные технологии включают в себя маркетинговые, проектно-конструкторские, производственные, технологические и информационные процессы, которые обеспечивают полный жизненный цикл мехатронных изделий. Раскрытие связей и закономерностей, характерных для этих процессов, позволяет создавать мехатронные модули, объекты и системы, которые способны наиболее эффективно выполнять заданные требования.
Целевой задачей мехатроники является проектирование и производство качественно новых модулей и машин. Качество машины оценивается совокупностью специально подобранных показателей (или критериев), выбор которых определяется ее служебным (функциональным) назначением. Машины нового поколения должны отвечать таким общим критериям, как отношение цена/качество, высокая надежность и безопасность функционирования.
К числу новых современных требований к функциональным и техническим показателям модулей и машин в первую очередь следует отнести:
— выполнение машинами и системами качественно новых служебных и функциональных задач;
— сверхвысокие скорости движения конечного звена машины – ее рабочего органа, что определяет новый уровень производительности технологических комплексов;
— ультрапрецизионные движения модулей с целью реализации новых прецизионных технологий вплоть до микро – и нанотехнологий;
— компактность модулей и движущихся систем, миниатюризация конструкций в микромашинах;
— новые кинематические структуры и конструктивные компоновки многокоординатных машин;
— интеллектуальное поведение систем, функционирующих в изменяющихся и неопределенных внешних средах;
— выполнение пространственных движений по криволинейным траекториям и реализация сложных законов перемещения во времени.
В конкретных областях мехатроники, таких как робототехника, летательные аппараты, медицинское оборудование, транспорт и пр. используется специализированная терминология.
Дата добавления: 2015-08-11 ; просмотров: 3766 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Мехатронные модули. Назначение, функции и структура мехатронного модуля. Область применения. Мехатронные модули систем автоматики
МДК 05.02
Технология контроля соответствия и надежности устройств и функциональных блоков мехатронных и автоматических устройств и систем управления
Общие понятия о технологии контроля соответствия и надёжности устройств и функциональных блоков мехатронных и автоматических устройств и систем управления.
Мехатронные модули. Назначение, функции и структура мехатронного модуля. Область применения. Мехатронные модули систем автоматики
Мехатроника – это новая область науки и техники, посвященное созданию и эксплуатации машин и систем с компьютерным управлением движения, которая базируется на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов.
В данном определении особо подчеркнуто приединая сущность мехатронной системы, в основу построения которой заложена идея глубокой взаимосвязи механических, электронных и компьютерных элементов. Поэтому эмблемой мехатроники ставят 3 пересекающихся круга, включенных в общую оболочку:
производство, 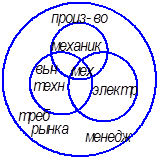
Таким образом, системная интеграция 3 указанных видов элемента является необходимым условием построения мехатронной системы.
Известно несколько определений мехатроники как науки.
Предлагается след специальная формулировка предмета мехатроники:
Мехатроника — изучает синергетическое объединение узлов точной механики с электронными, электротехническими и компьютерными компонентами с целью проектирования и производства качественно новых модулей, машин, систем и комплексов машин с интеллектуальным управлением с их функциональными движениями.
Пояснения к определению:
1. Мехатроника изучает особые методологический подход построения машин с качественно новыми характеристиками. Этот подход является универсальным и может быть применен в машинных системах различного назначения. Однако, следует отметить, что обеспечить высокое качество управления мехатронной системой можно только с учетом специфики конкретного управляемого объекта.
2. В определении подчеркивается синергетический характер интеграции составляющих элементов мехатронных объектов. Синергия — это совместное действие, направленное на достижение единой цели. При этом важно, что составляющие части непросто дополняют друг друга, а объединяются таким образом, что образованные системы обладают качественно новыми свойствами. В мехатронике все энергетические и информационные потоки направлены на достижение единой цели в реализации заданного управляемого движения.
3. Интегрированные мехатронные элементы выбираются разработчиком уже на стадии проектирования машин, а затем обеспечиваются необходимые инженерная и технологическая поддержка при производстве и эксплуатации машин. В этом отличие мехатронных машин от традиционных, когда пользователь зачастую был вынужден самостоятельно объединять систему в разнородные механические , электронные и информационные управляющие устройства различных изготовителей. Именно поэтому многие сложные комплексы показали на практике низкую надежность и невысокую технико-экономическую эффективность.
4. Методологической основой разработки мехатронных систем служат методы параллельного проектирования. При традиционном проектировании машин с компьютерным управлением проводятся разработка механической ,электронной , сенсорной и компьютерной частей системы, а затем выбор интерфейсных блоков. Особенность параллельного проектирования заключается в одновременном и взаимосвязанном синтезе всех компонентов системы.
5. Базовыми объектами изучения мехатроники является мехатронный модуль, который выполняет движения по одной управляемой кординате. Из таких модулей как из функциональных кубиков компануются сложные системы модульной архитектуры.
6. Мехатронные системы предназначены для реализации заданного движения. Критерий качества выполнения движения мехатронных систем – проблемное ориентирование, то есть определяется постановкой конкретной прикладной задачи. Специфика задач автоматизированного машиностроения состоит в реализации перемещений выходных звеньев рабочего органа технологической машины (инструмент на станке). При этом необходимо координировать управление пространством перемещения мехатронных систем с управлением различными внешними процессами.
Примерами таких процессов могут служить регулирование силового взаимодействия рабочего органа с объектом работ при механообработке, контроль и диагностика текущего состояния критических элементов мехатронных систем, управление дополнительными технологическими воздействиями на объект работ при комбинированных методах обработки, управление вспомогательным оборудованием, выдача и прием сигналов от устройств электроавтоматики. Такие сложные координированные движения называют функциональными движениями.
В современных мехатронных системах для реализации высокого качества и точности движения применяются методы интеллектуального управления. Данная группа методов опирается на новые идеи теории управления современным аппаратным и программным средством вычислительной техники, перспективные подходы к синтезу управляемого движения мехатронных систем.
Мехатроника как новая область науки и техники находится в стадии своего становления, ее терминология, границы и классификационные признаки еще строго не очерчены.
«А.И. Грабченко, В.Б. Клепиков, В.Л. Доброскок, Г.К. Крыжный, Н.В. Анищенко, Ю.Н. Кутовой, Д.А. Пшеничников, Я.Н. Гаращенко ВВЕДЕНИЕ В МЕХАТРОНИКУ Учебное пособие Харьков 2014 УДК . »
В дальнейшем к высшему уровню мехатронного объекта возможно будет причислить комплекс, объединяющий несколько систем, либо систему и другие мехатронные объекты различных низших уровней. Определение комплекса в фундаментальном словаре механики машин отсутствует, а в энциклопедическом словаре дается как совокупность предметов, составляющих одно целое. Считается, что в перспективе мехатронные машины и системы будут объединяться в комплексы на основе единых интеграционных платформ (этот термин четко не определен).
Термин «машина» был выведен из иерархии, поскольку в фундаментальном словаре механики машин он отождествлен с агрегатом, а в некоторых работах Артоболевского И.И. машина с приводом называется агрегатом. Соответственно термин «машина» можно оставить как синоним термина «агрегат».
Мехатронные технологии – информационные технологии управления движением, т.е. реализация с помощью информационных технологий сложных законов исполнительных движений, которые по тем или иным причинам не могли быть реализованы с использованием традиционных технологий ранее. Например, интеллектуализация металлорежущих станков и достижения в области динамики резания позволяют с помощью данных технологий управлять различными видами колебаний, динамической характеристикой технологической системы, корректировать возникающие недостатки этой системы и т.д.
Важным является определение признаков мехатронности. Мехатронными объектами являются большинство современных электромеханических систем с управлением. Очень многие электронные объекты фактически являются мехатронными.
К объектам разной степени мехатронности или уровней интеграции можно отнести станки с ЧПУ, промышленные и специальные роботы, многие образцы авиакосмической, военной техники и автомобилестроения.
Мехатронными являются офисная техника (факсы, копиры), средства вычислительной техники (плоттеры, принтеры, дисководы), видеотехника (видеомагнитофоны), бытовая техника (стиральные, швейные, посудомоечные и др. машины-автоматы), нетрадиционные транспортные средства (электровелосипеды, грузовые тележки, электророллеры, инвалидные коляски), тренажеры для подготовки пилотов и операторов, шоу-индустрия (системы звукового и светового оформления).
Мехатронность объектов – динамическое явление, формируемое в процессе их эволюционного развития и совершенствования.
Отсюда и различная степень интеграции компонентов и уровня их интеллектуализации.
К полностью мехатронным относят объекты, в которых реализована максимально возможная степень интеграции в сочетании с наивысшим уровнем интеллектуализации.
В настоящее время большей частью применяют мехатронизированные объекты, чем в значительной мере и определяется настоящий период развития мехатроники.
2.2 Структура и принципы построения мехатронных систем Методологической основой разработки мехатронных систем служат методы параллельного проектирования (concurrent engineering methods). При традиционном проектировании машин с компьютерным управлением последовательно проводится разработка механической, электронной, сенсорной и компьютерной частей системы, а затем выбор интерфейсных блоков.
Парадигма параллельного проектирования заключается в одновременном и взаимосвязанном синтезе всех компонент системы.
На рис. 2.2 представлена обобщенная структура машин с компьютерным управлением (автоматических роботов), используемых в машиностроении. Данная схема позволяет показать принципы построения мехатронных систем.
Внешней средой для машин рассматриваемого класса является технологическая среда, которая содержит основное и вспомогательное оборудование, технологическую оснастку и объекты работ.
При выполнении мехатронной системой заданного функционального движения объекты работ оказывают возмущающие воздействия на рабочий орган. Примерами таких воздействий могут служить силы резания для операций механообработки, контактные силы и моменты сил при сборке, сила реакции струи жидкости при операции гидравлической резки.
Внешние среды делят на два основных класса: детерминированные и недетерминированные. К детерминированным относятся среды, для которых параметры возмущающих воздействий и характеристики объектов работ могут быть заранее определены с необходимой точностью для проектирования мехатронных систем.
Некоторые среды являются недерминированными по своей природе (например, экстремальные среды: подводные, подземные и т.п.).
Характеристики технологических сред, как правило, могут быть определены с помощью аналитико-экспериментальных исследований и методов компьютерного моделирования. Например, для определения сил резания при механообработке проводятся экспериментальные исследования на специальных установках, параметры вибрационных воздействий измеряют на вибростендах с последующим формированием математических и/или компьютерных моделей возмущающих воздействий.
Интеллектуальные устройства Исполнительные устройства Рисунок 2.2 – Обобщенная схема машины с компьютерным Однако для проведения таких исследований, как правило, требуются слишком сложные и дорогостоящие аппаратура и измерительные технологии. Так для предварительной оценки силовых воздействий на рабочий орган на операции роботизированного удаления облоя с отливок необходимо контролировать их форму и размеры. В таких случаях целесообразно применять методы адаптивного управления, которые позволяют автоматически корректировать закон движения рабочих органов мехатронных систем непосредственно в ходе выполнения операции.
В состав традиционной машины входят следующие основные компоненты: механическое устройство (конечное звено — рабочий орган; блок приводов, включающий силовые преобразователи и исполнительные двигатели; устройство компьютерного управления, верхним уровнем для которого является человек-оператор, либо другая ЭВМ, входящая в компьютерную сеть; сенсоры, предназначенные для передачи в устройство управления информации о фактическом состоянии блоков машины и движении мехатронной системы.
Таким образом, наличие трех обязательных частей – механической (электромеханической), электронной и компьютерной, связанных энергетическими и информационными потоками, является первичным признаком мехатронных систем.
Электромеханическая часть включает механические звенья и передачи, рабочий орган, электродвигатели, сенсоры и дополнительные электротехнические элементы (тормоза, муфты). Механическое устройство предназначено для преобразования движений звеньев в требуемое движение рабочего органа. Электронная часть состоит из микроэлектронных устройств, силовых преобразователей и электроники измерительных цепей. Сенсоры предназначены для сбора данных о фактическом состоянии внешней среды и объектов работ, механического устройства и блока приводов с последующей первичной обработкой и передачей этой информации в устройство компьютерного управления. В состав этого устройства обычно входят компьютер верхнего уровня и контроллеры управления движением.
Устройство компьютерного управления выполняет следующие основные функции:
• управление процессом механического движения мехатронного модуля или многомерной системы в реальном времени с обработкой сенсорной информации;
• организация управления функциональными движениями мехатронной системы, которая предполагает координацию управления механическим движением мехатронной системы и сопутствующими внешними процессами.
• взаимодействие с оператором через интерфейс в режимах автономного программирования (off-line) и непосредственно в процессе движения мехатронной системы (on-line).
• организация обмена данными с периферийными устройствами, сенсорами и другими устройствами системы.
Задачей мехатронной системы является преобразование входной информации, поступающей с верхнего уровня управления, в целенаправленное механическое движение с управлением на основе принципа обратной связи.
Характерно, что электрическая энергия (реже гидравлическая или пневматическая) используется в современных системах как промежуточная энергетическая форма.
Особенность мехатронного подхода к проектированию заключается в интеграции в единый функциональный модуль двух или более элементов возможно даже различной физической природы.
Соответственно на стадии проектирования из традиционной структуры машины исключается как минимум один интерфейс при сохранении физической сущности преобразования, выполняемого данным модулем.
В идеальном для пользователя варианте мехатронный модуль, получив на вход информацию о цели управления, будет выполнять заданное функциональное движение с допустимой погрешностью.
Аппаратное объединение элементов в единые конструктивные модули обязательно сопровождают разработкой интегрированного программного обеспечения.
Программные средства обеспечивают непосредственный переход от замысла системы через ее математическое моделирование к управлению функциональным движением в реальном времени.
Применение мехатронного подхода при создании машин с компьютерным управлением определяет их основные преимущества по сравнению с традиционными средствами автоматизации:
• относительно низкую стоимость благодаря высокой степени интеграции, унификации и стандартизации элементов и интерфейсов;
• высокую точность сложных движений вследствие применения методов интеллектуального управления;
• высокую надежность, долговечность и помехозащищенность;
• конструктивную компактность модулей (вплоть до миниатюризации в микромашинах);
• улучшенные массогабаритные и динамические характеристики машин вследствие упрощения кинематических цепей;
• возможность комплексирования функциональных модулей в сложные системы и комплексы под конкретные задачи заказчика.
Вопросы для самопроверки 1. Дайте определение термина «мехатроника».
2. Что такое мехатронный объект?
3. Каким мехатронным уровням может соответствовать технический объект? Приведите примеры.
4. Что такое «устройство»?
5. Мехатронность технических объектов, что это такое?
5. Какие основные принципы положены в основу построения мехатронных систем?
6. Какие устройства могут являться составной частью машин с компьютерным управлением движением?
7. Какие функции выполняет устройство компьютерного управления в мехатронной системе или модуле?
8. Объясните суть мехатронного подхода к проектированию.
9. Какие основные преимущества мехатронного подхода при создании машин с компьютерным управлением по сравнению с традиционными средствами автоматизации?
Список литературы к разделу 1. Артоболевский И.И. Теория механизмов. — М.: Наука, 1963. с.
2. Аршанский М.М. Мехатронные технологии обработки металлов резанием // Мехатроника. 2000. №1. — С.39-41.
3. Аршанский М.М., Шалобаев Е.В. Мехатроника: основы глоссария // Мехатроника. 2001. № 4. — С.47-48.
4. Егоров О.Д., Подураев Ю.В. Мехатронные модули. Расчет и конструирование: Учебное пособие. — М.: МГТУ «СТАНКИН», 2004. — 360 с.
5. Зариктуев В.Ц. К проблеме создания мехатронных станочных систем (информационный аспект) // Мехатроника. 2000. № 4. С.23-27.
6. Коськин Ю.П., Путов В.В. Проблемы и перспективы современного развития электромеханотроники // Мехатроника. 2000.
7. Крайнев А.Ф. Механика машин: Фундаментальный словарь.
— М.: Машиностроение, 2000. — С. 904.
 «Министерство образования и науки Украины Министерство образования и науки Российской Федерации Федеральное агентство по образованию Южно-Российский государственный технический университет (Новочеркасский политехнический институт) Донецкий национальный технический университет Национальный горный университет Шахтинский институт (филиал) 1899 МЕТОДИЧЕСКИЕ УКАЗАНИЯ К выполнению лабораторных работ по курсу Материаловедение Донецк –Днепропетровск Новочеркасск– 2006 Министерство образования и науки. »
«Министерство образования и науки Украины Министерство образования и науки Российской Федерации Федеральное агентство по образованию Южно-Российский государственный технический университет (Новочеркасский политехнический институт) Донецкий национальный технический университет Национальный горный университет Шахтинский институт (филиал) 1899 МЕТОДИЧЕСКИЕ УКАЗАНИЯ К выполнению лабораторных работ по курсу Материаловедение Донецк –Днепропетровск Новочеркасск– 2006 Министерство образования и науки. »
«Министерство образования и науки РФ Томский государственный архитектурно-строительный университет ОСНОВЫ КОМПЬЮТЕРНОЙ ГРАФИКИ Методические указания к выполнению контрольной работы Составители М.Е. Семёнов, С.Н. Колупаева Томск 2011 Основы компьютерной графики (лабораторный практикум): методические указания / Сост. М.Е. Семёнов, С.Н. Колупаева. – Томск: Изд-во Том. гос. архит.-строит. ун-та, 2011. – 56 с. Рецензент к.ф.-м.н. С.Н. Постников Редактор Е.Ю. Глотова Методические указания к выполнению. »
«Министерство образования и науки Российской Федерации Сыктывкарский лесной институт (филиал) федерального государственного бюджетного образовательного учреждения высшего профессионального образования Санкт-Петербургский государственный лесотехнический университет имени С. М. Кирова Кафедра дорожного, промышленного и гражданского строительства ОСНОВЫ ГЕОЛОГИИ И ГЕОМОРФОЛОГИИ Учебно-методический комплекс по дисциплине для студентов специальности 270102 Промышленное и гражданское строительство. »
«ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ КЕМЕРОВСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ ПИЩЕВОЙ ПРОМЫШЛЕННОСТИ С.М. Бугрова Н.М. Гук РИСК-МЕНЕДЖМЕНТ Учебное пособие Для студентов вузов Кемерово 2005 2 УДК 338: 368.8 ББК 65.290-2я7 Б90 Рецензенты: Н.Н. Голофастова, канд. экон. наук, доцент, зав. кафедрой Экономика и организация машиностроительной промышленности Кемеровского государственного технического университета; Е.И. Харлампенков, канд. техн. наук, доцент, зав. кафедрой Коммерция и маркетинг Кемеровского. »
«Министерство образования Республики Беларусь УО Брестский государственный политехнический колледж УТВЕРЖДАЮ Зам. директора по учебной работе Н.В. Ратникова 20 ТЕХНОЛОГИЧЕСКОЕ ОБОРУДОВАНИК МЕТОДИЧЕСКИЕ УКАЗАНИЯ для выполнения домашних контрольных работ для учащихся специальности 2-36 01 31 Металлорежущие станки и инструмент (по направлениям) заочная (форма обучения) 2014 Разработал: В.В. Лапин, преподаватель УО Брестский государственный политехнический колледж. Методические указания разработаны. »
«МИНИСТЕРСТВО РОССИЙСКОЙ ФЕДЕРАЦИИ ПО ЗЕМЕЛЬНОЙ ПОЛИТИКЕ, СТРОИТЕЛЬСТВУ И ЖИЛИЩНО — КОММУНАЛЬНОМУ ХОЗЯЙСТВУ ПРИКАЗ от 25 сентября 1998 г. N 98-1 О ВВЕДЕНИИ ЕДИНОЙ СИСТЕМЫ ВЕДЕНИЯ ГОСУДАРСТВЕННОГО ЗЕМЕЛЬНОГО КАДАСТРА (в ред. Приказа Госкомзема РФ от 22.11.1999 N 84) Во исполнение протокола первого заседания круглого стола от 26 декабря 1997 года, пункт 3, подпункт б, в соответствии с Постановлением Правительства Российской Федерации от 25.08.92 N 622 О совершенствовании ведения государственного. »
«5 ИСТОРИЯ ДАЛЬНЕГО ВОСТОКА АРХИТЕКТУРНАЯ ИДЕЯ ГОРОДА КОМСОМОЛЬСК-НА-АМУРЕ В 30—50-Е ГОДЫ XX В. Вера Николаевна САВЕНКОВА, кандидат культурологии В статье предпринята попытка социокультурного анализа дискурса власти (властных технологий и символов) в формировании социального (городского) пространства. Анализ основан на исследовании характерных особенностей градостроительной практики и архитектуры г. Комсомольска-на-Амуре в 30—50-х годах XX в. Власть в данном случае понимается как внеисторическая. »
«2 НАЧЕРТАТЕЛЬНАЯ ГЕОМЕТРИЯ Федеральное агентство по образованию Методические указания для студентов машиностроительных специальностей, Восточно-Сибирский государственный заочной формы обучения. технологический университет Габагуев А. А., Чистяков Ф.К., Боноев П.А. Кафедра Инженерная и компьютерная графика. Ключевые слова: проекция, комплексный чертеж, точка, линия, поверхность, преобразование, позиционные задачи. Рецензент: Балдаев В.П., доц. каф. ДМ и ТММ ВСГТУ. Начертательная геометрия. »
«Методические указания к выполнению курсового проекта по дисциплине Технология строительных материалов и ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ изделий для бакалавров по направлению 550100- Восточно-Сибирский государственный Строительство технологический университет Составитель: Балханова Е.Д. Рецензент: Беппле Р.Р. Методические указания к выполнению курсового проекта по дисциплине Технология строительных материалов и изделий для бакалавров по направлению 550100 Строительство включают содержание. »
«Федеральное агентство по образованию Ангарская государственная техническая академия Кафедра промышленного и гражданского строительства Комплексное инженерное благоустройство городских территорий Методические указания по выполнению курсового проекта для студентов специальности 270105 Городское строительство и хозяйство Ангарск 2008 Комплексное инженерное благоустройство городских территорий. Методические указания по выполнению курсового проекта для студентов специальности 270105 Городское. »
© 2013 www.dis.konflib.ru — «Бесплатная электронная библиотека»
Материалы этого сайта размещены для ознакомления, все права принадлежат их авторам.
Если Вы не согласны с тем, что Ваш материал размещён на этом сайте, пожалуйста, напишите нам, мы в течении 1-2 рабочих дней удалим его.