Регулирование частоты вращения двигателей с параллельным возбуждением
 Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Первый способ применяют редко, так как он неэкономичен, дает возможность вести регулирование частоты вращения только под нагрузкой и вынуждает использовать механические характеристики, имеющие различный наклон. При регулировании по этому способу вращающий предельно допустимый момент остается постоянным. Магнитный поток не меняется, и если приближенно считать, что сила тока, определяемая длительно допустимым нагревом двигателя, одинакова на всех частотах вращения, то предельно допустимый момент также должен быть одинаков на всех скоростях.
Регулирование скорости двигателей постоянного тока с параллельным возбуждением изменением магнитного потока получило значительное распространение. Величину потока можно изменять реостатом. При увеличении сопротивления этого реостата уменьшается сила тока возбуждения и магнитный поток и увеличивается частота вращения. Каждому уменьшенному значению магнитного потока Ф соответствуют увеличенные значения n0 и b.
Таким образом, при ослаблении магнитного потока механические характеристики представляют собой прямые линии, расположенные выше естественной характеристики, непараллельные ей и имеющие тем больший наклон, чем меньшим потокам они соответствуют. Число их зависит от числа контактов на реостате и может быть достаточно большим. Таким образом, регулирование частоты вращения ослаблением потока может быть сделано практически бесступенчатым.

Если по-прежнему приближенно считать предельно допустимую силу тока на всех скоростях одинаковой, то P = const
Таким образом, при регулировании частоты вращения изменением магнитного потока предельно допустимая мощность двигателя остается постоянной при всех скоростях. Предельно допустимый момент изменяется обратно пропорционально частоте вращения. При повышении частоты вращения двигателя ослаблением поля увеличивается искрение под щетками вследствие роста реактивной э. д. с, наводимой в коммутируемых секциях двигателя.
При работе двигателя с ослабленным потоком уменьшается устойчивость работы, особенно когда нагрузка на валу двигателя является переменной. При малом значении потока заметно размагничивающее действие реакции якоря. Так как размагничивающее действие определяется величиной силы тока якоря электродвигателя, то при изменениях нагрузки частота вращения двигателя резко меняется. Для повышения устойчивости работы регулируемые двигатели с параллельным возбуждением обычно снабжают слабой последовательной обмоткой возбуждения, поток которой частично компенсирует размагничивающее действие реакции якоря.
Двигатели, предназначенные для работы с повышенными частотами вращения, должны обладать повышенной механической прочностью. При высоких скоростях усиливаются вибрации двигателя и шум при работе. Эти причины ограничивают наибольшую частоту вращения электродвигателя. Низшая частота вращения также имеет определенный практический предел.
Номинальный момент определяет размеры и стоимость двигателей постоянного тока (так же как и асинхронных двигателей). При понижении наименьшей, в данном случае номинальной, частоты вращения двигателя определенной мощности номинальный момент его возрастет. Размеры двигателя при этом увеличатся.
На промышленных предприятиях наиболее часто применяют двигатели с диапазонами регулирования

Для расширения диапазона регулирования частоты вращения изменением магнитного потока иногда употребляют особую схему возбуждения двигателя, позволяющую улучшить коммутацию и снизить влияние реакции якоря на высоких частотах вращения двигателя. Питание катушек двух пар полюсов разделяют, образуя две независимые цепи: цепь катушек одной пары полюсов и цепь другой пары.
Одну из цепей включают на постоянное напряжение, в другой изменяют величину и направление тока. При таком включении общий магнитный поток, взаимодействующий с якорем, можно изменять от суммы наибольших значений потоков катушек двух цепей до их разности.
Катушки включены так, что через одну пару полюсов всегда проходит полный магнитный поток. Поэтому реакция якоря сказывается в меньшей степени, чем при ослаблении магнитного потока всех полюсов. Так можно регулировать все многополюсные двигатели постоянного тока с волновой обмоткой якоря. При этом достигается устойчивая работа двигателя в значительном диапазоне скоростей.
Регулирование частоты вращения двигателей постоянного тока посредством изменения подводимого напряжения требует применения специальных схем.
Двигатели постоянного тока по сравнению с асинхронными значительно тяжелее и в несколько раз дороже. К. п. д. этих двигателей ниже, а эксплуатация их более сложна.
Промышленные предприятия получают энергию трехфазного тока, и для получения постоянного тока требуются специальные преобразователи. Это связано с добавочными потерями энергии. Основной причиной применения для привода металлорежущих станков двигателей постоянного тока с параллельным возбуждением является возможность практически бесступенчатого и экономичного регулирования их частоты вращения.
В станкостроении применяют комплектные приводы с выпрямителями и двигателем постоянного тока с параллельным возбуждением (рис. 1). Посредством реостата PC изменяют силу тока возбуждения электродвигателя, обеспечивая практически бесступенчатое регулирование его частоты вращения в диапазоне 2:1. В комплект привода входит пусковой реостат РП, а также аппаратура защиты, на рис. 1 не показанная.
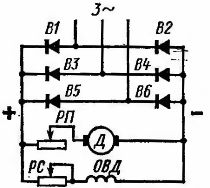
Рис. 1. Схема электропривода постоянного тока с выпрямителем
В ыпрямители (B1 — В6), погруженные в трансформаторное масло, и всю аппаратуру помещают в шкафу управления, а реостат PC устанавливают в месте, удобном для обслуживания.
Двигатели параллельного возбуждения
 Схема двигателя.
Схема двигателя.
Схема двигателя параллельного возбуждения изображена на рис. 1.25. Обмотка якоря и обмотка возбуждения включены параллельно. В этой схеме: I – ток, потребляемый двигателем из сети, Iя – ток якоря, Iв – ток возбуждения. Из первого закона Кирхгофа следует, что I = Iя + Iв.
Естественная механическая характеристика. Естественная механическая характеристика описывается формулой (1.6).
При холостом ходе М = 0 и nх = U/СЕФ.
Если Ф = const, то уравнение механической характеристики принимает вид:
Из (1.8) следует, что механическая характеристика (рис. 1.26, прямая 1) – прямая с углом наклона a и угловым коэффициентом b. Так как у двигателей постоянного тока Rя мало, то с увеличением нагрузки на валу частота вращения n изменяется незначительно – характеристики подобного типа называются «жесткими».
Ток, потребляемый двигателем из сети, практически растет пропорционально моменту нагрузки. Действительно, М » Мэм = См Iя Ф, и так как у двигателя параллельного возбуждения Ф = const, то Iя
Регулирование частоты вращения.
Регулирование частоты вращения возможно из (1.6) тремя способами: изменением магнитного потока главных полюсов Ф, изменением сопротивления цепи якоря Rя и изменением подводимого к цепи якоря напряжения U (изменение n за счет изменения момента нагрузки М в понятие регулирования не входит).
 Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв и магнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв и магнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Другой способ регулирования скорости связан с включением последовательно с якорем регулировочного реостата Rя.р (пусковой реостат Rп для этой цели непригоден, так как он рассчитан на кратковременный режим работы). Формула (1.6) при этом принимает вид:
n =  ,
,
откуда следует, что скорость при холостом ходе при любом сопротивлении Rя.р одинакова, а коэффициент b и, следовательно, наклон механических характеристик 5-7 увеличивается (рис. 1.26). Регулирование частоты вращения этим способом приводит к уменьшению частоты вращения относительно естественной характеристики. Кроме того, оно неэкономично, так как связано с большой мощностью потерь (Rя.р I ) в регулировочном реостате, по которому протекает весь ток якоря.
) в регулировочном реостате, по которому протекает весь ток якоря.
 Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Регулирование частоты вращения изменением U практически возможно только в сторону уменьшения, так как увеличение напряжения выше номинального недопустимо из-за резкого ухудшения коммутации. Из (1.9) следует, что при уменьшении напряжения уменьшается скорость холостого хода nх, а наклон механических характеристик 8-10 не изменяется (см. рис. 1.26), они остаются жесткими даже при низких напряжениях. Диапазон регулирования (nmax/nmin) таким способом 6:1-8:1. Он может быть значительно расширен при применении специальных схем с обратными связями.
Регулировочная характеристика.
Регулировочная характеристика n=f(Iв) двигателя параллельного возбуждения изображена на рис. 1.29.
Ее характер определяется зависимостью (1.5), из которой следует, что частота вращения обратно пропорциональна магнитному потоку и, следовательно, току возбуждения Iв. При токе возбуждения Iв = 0, что может быть при обрыве цепи возбуждения, магнитный поток равен остаточному Фост и частота вращения становится настолько большой, что двигатель может механически разрушиться, – подобное явление называется разносом двигателя.
Физически явление разноса объясняется тем, что вращающий момент (1.2) при уменьшении магнитного потока, казалось бы, должен уменьшиться, однако ток якоря Iя = (U – E)/Rя увеличивается значительнее, так как уменьшается Е (1.1) и разность U – E увеличивается в большей степени (обычно Е » 0,9 U).
 Тормозные режимы.
Тормозные режимы.
Тормозные режимы двигателя имеют место тогда, когда электромагнитный момент, развиваемый двигателем, действует против направления вращения якоря. Они могут возникать в процессе работы двигателя при изменении условий работы или создаваться искусственно с целью быстрого уменьшения скорости, остановки или реверсирования двигателя.
У двигателя параллельного возбуждения возможны три тормозных режима: генераторное торможение с возвратом энергии в сеть, торможение противовключением и динамическое торможение.
Генераторное торможение возникает в тех случаях, когда частота вращения якоря n становится больше частоты вращения при идеальном (т.е. при Мпр = 0) холостом ходе nx (n>nx). Переход в этот режим из режима двигателя возможен, например, при спуске груза, когда момент, создаваемый грузом, приложен к якорю в том же направлении, что и электромагнитный момент двигателя, т.е. тогда, когда момент нагрузки действует согласно с электромагнитным моментом двигателя и он набирает скорость, большую чем nx. Если n>nx, то Е>Uc (где Uc – напряжение сети) и ток двигателя изменяет свой знак (1.4) – электромагнитный момент из вращающего становится тормозным, а машина из режима двигателя переходит в режим генератора и отдает энергию в сеть (рекуперация энергии). Переход машины из двигательного режима в генераторный иллюстрируется механической характеристикой (рис. 1.30). Пусть в двигательном режиме a1 – рабочая точка; ей соответствует момент М. Если частота вращения увеличивается, то рабочая точка по характеристике 1 из квадранта I переходит в квадрант II, например, в рабочую точку a2, которой соответствует частота вращения n΄ и тормозной момент – М΄.
Торможение противовключением возникает в работающем двигателе, когда направление тока в якоре или тока возбуждения переключается на противоположное. Электромагнитный момент при этом изменяет знак и становится тормозным.
Работе двигателя с противоположным направлением вращения соответствуют механические характеристики, располагающиеся в квадрантах II и III (например, естественная характеристика 2 на рис. 1.30).
Внезапный переход на эту характеристику практически недопустим, так как сопровождается чрезмерно большим броском тока и тормозного момента. По этой причине одновременно с переключением одной из обмоток в цепь якоря включается добавочное сопротивление Rдоб, ограничивающее ток якоря.
Механическая характеристика режима с Rдоб имеет большой наклон (прямая 3). При переходе в режим противовключения частота вращения n в первый момент измениться не может (из-за инерционности якоря) и рабочая точка из положения a1 перейдет в положение a3 на новой характеристике. Из-за появления Мтор частота вращения n будет быстро падать до тех пор, пока рабочая точка a3 не перейдет в положение a4, соответствующее остановке двигателя. Если в этот момент двигатель не отключить от источника питания, то якорь изменит направление вращения. Машина начнет работать в двигательном режиме с новым направлением вращения, а ее рабочая точка a5 будет находиться на механической характеристике 3 в квадранте III.
 Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
n = 
что соответствует семейству прямых 4 (при разных Rд.т), проходящих через начало координат. При переключении в этот режим рабочая точка a1 переходит на одну из характеристик 4, например, в точку a6, а затем перемещается по прямой 4 до нуля. Якорь двигателя тормозится до полной остановки. Изменением сопротивления Rд.т можно регулировать ток якоря и скорость торможения.