Регулирование скорости оборотов двигателя постоянного тока
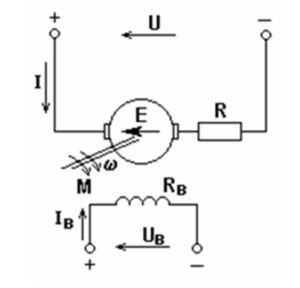
С точки зрения регулирования скоростью вращения электродвигателей, интересно уравнение для электромеханических характеристик, соответствующее Второму закону Кирхгофа:
ω = U/C×Φ – ΥЯ /( C×Φ) 3 ×M
При описании технических характеристик электродвигателя скорость, выражаемая оборотами в минуту, зачастую называется частотой вращения ν по известному соотношению:
ω = 2p/T = 2pn
Поэтому эти две разноименные величины часто применяются в одном и том же смысле. Скорость w (частота ν) находится в прямой зависимости от напряжения питания U и в обратной от магнитного потока Ф. Исходя из приведенной выше формулы, возникает вывод, что скоростью можно управлять, регулируя сопротивление якоря, магнитный поток и напряжение питания.

Методы регулировки
Итак, различают три основных варианта регулирования скоростью:
- Изменением напряжения сети. Меняя подводимое питание можно управлять частотой вращения двигателя;
- Добавлением пускового реостата в цепь якоря. Регулируя сопротивление, можно уменьшить скорость вращения;
- Управлением магнитного потока. Двигатели с электромагнитами дают возможность регулировать поток путем изменения тока возбуждения. Однако нижний предел ν min ограничен насыщением магнитной цепи двигателя, что не позволяет увеличивать в большой степени магнитный поток.
К каждому из вариантов соответствует определённая зависимость механических характеристик.
Методы регулирования применительны к двигателям с различными:
- типами возбуждения;
- величиной мощности.
На практике в современных электрических моторах, в связи с недостатками и ограниченности диапазонов, рассмотренные методы не всегда применяются.
Это еще связано с тем, что машины отличаются довольно небольшими КПД, и к тому же не позволяют плавно увеличивать или уменьшать частоту вращения.
Электронные же схемы управления с регуляторами частоты, работающими от аккумуляторной батареи на 12 В, напротив, широко используются. Например, они очень актуальны для управления низковольтными электродвигателями 12 вольт в приборах автоматики, детских игрушках, электрических велосипедах, аккумуляторных детских автомобилях.

Принципиальной особенностью метода является то, что ток в цепи якоря и момент, развиваемый электродвигателем, зависят лишь от величины нагрузки на его валу. Регулировка осуществляется с помощью регулятора оборотов электродвигателя.
В течение очень долгого времени тиристорные преобразователи являлись единственным коммерчески доступными регуляторами двигателей. К слову сказать, они по-прежнему самые распространенные на сегодняшний день. Однако с появлением силовых транзисторов стали наиболее популярными регуляторы оборотов двигателя постоянного тока с широтно-импульсной модуляцией. Приведём для примера ниже схему, работающую от источника постоянного тока 12 В.
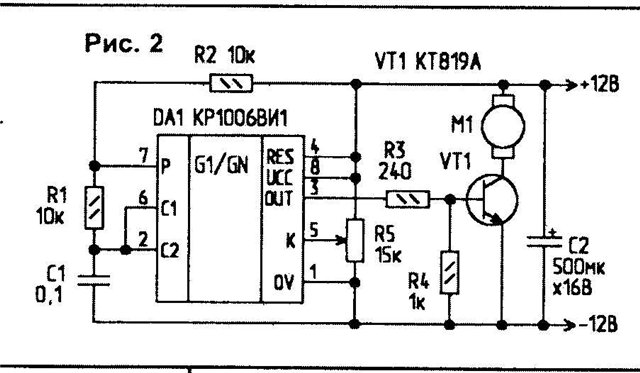
Схема на практике даёт возможность, к примеру, увеличивать либо уменьшать яркость свечения ламп накаливания на 12 вольт.
Последовательно-параллельное управление используется в ситуациях, когда два или более агрегата постоянного тока соединены механически. Схема с последовательным соединением электродвигателей, в которой общее напряжение делится на всех, используется для низкоскоростных приложений. Схема с параллельным соединением машин, имеющих одинаковое напряжение, используется в высокоскоростных применениях.
Заключение
Рассмотренный метод регулировки напряжения сети считается самым эффективным и экономичным вариантом, так как:
- им обеспечивается широкий диапазон изменения скоростей (wmin / wmax) и лучшие энергетические характеристики (КПД);
- он работает без каких-либо потерь мощности в силовой цепи якоря.
Управление осуществляется плавно, и по точности регулировка частоты вращения является весьма высокой.
Регулирование частоты вращения двигателей с параллельным возбуждением
 Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Первый способ применяют редко, так как он неэкономичен, дает возможность вести регулирование частоты вращения только под нагрузкой и вынуждает использовать механические характеристики, имеющие различный наклон. При регулировании по этому способу вращающий предельно допустимый момент остается постоянным. Магнитный поток не меняется, и если приближенно считать, что сила тока, определяемая длительно допустимым нагревом двигателя, одинакова на всех частотах вращения, то предельно допустимый момент также должен быть одинаков на всех скоростях.
Регулирование скорости двигателей постоянного тока с параллельным возбуждением изменением магнитного потока получило значительное распространение. Величину потока можно изменять реостатом. При увеличении сопротивления этого реостата уменьшается сила тока возбуждения и магнитный поток и увеличивается частота вращения. Каждому уменьшенному значению магнитного потока Ф соответствуют увеличенные значения n0 и b.
Таким образом, при ослаблении магнитного потока механические характеристики представляют собой прямые линии, расположенные выше естественной характеристики, непараллельные ей и имеющие тем больший наклон, чем меньшим потокам они соответствуют. Число их зависит от числа контактов на реостате и может быть достаточно большим. Таким образом, регулирование частоты вращения ослаблением потока может быть сделано практически бесступенчатым.

Если по-прежнему приближенно считать предельно допустимую силу тока на всех скоростях одинаковой, то P = const
Таким образом, при регулировании частоты вращения изменением магнитного потока предельно допустимая мощность двигателя остается постоянной при всех скоростях. Предельно допустимый момент изменяется обратно пропорционально частоте вращения. При повышении частоты вращения двигателя ослаблением поля увеличивается искрение под щетками вследствие роста реактивной э. д. с, наводимой в коммутируемых секциях двигателя.
При работе двигателя с ослабленным потоком уменьшается устойчивость работы, особенно когда нагрузка на валу двигателя является переменной. При малом значении потока заметно размагничивающее действие реакции якоря. Так как размагничивающее действие определяется величиной силы тока якоря электродвигателя, то при изменениях нагрузки частота вращения двигателя резко меняется. Для повышения устойчивости работы регулируемые двигатели с параллельным возбуждением обычно снабжают слабой последовательной обмоткой возбуждения, поток которой частично компенсирует размагничивающее действие реакции якоря.
Двигатели, предназначенные для работы с повышенными частотами вращения, должны обладать повышенной механической прочностью. При высоких скоростях усиливаются вибрации двигателя и шум при работе. Эти причины ограничивают наибольшую частоту вращения электродвигателя. Низшая частота вращения также имеет определенный практический предел.
Номинальный момент определяет размеры и стоимость двигателей постоянного тока (так же как и асинхронных двигателей). При понижении наименьшей, в данном случае номинальной, частоты вращения двигателя определенной мощности номинальный момент его возрастет. Размеры двигателя при этом увеличатся.
На промышленных предприятиях наиболее часто применяют двигатели с диапазонами регулирования

Для расширения диапазона регулирования частоты вращения изменением магнитного потока иногда употребляют особую схему возбуждения двигателя, позволяющую улучшить коммутацию и снизить влияние реакции якоря на высоких частотах вращения двигателя. Питание катушек двух пар полюсов разделяют, образуя две независимые цепи: цепь катушек одной пары полюсов и цепь другой пары.
Одну из цепей включают на постоянное напряжение, в другой изменяют величину и направление тока. При таком включении общий магнитный поток, взаимодействующий с якорем, можно изменять от суммы наибольших значений потоков катушек двух цепей до их разности.
Катушки включены так, что через одну пару полюсов всегда проходит полный магнитный поток. Поэтому реакция якоря сказывается в меньшей степени, чем при ослаблении магнитного потока всех полюсов. Так можно регулировать все многополюсные двигатели постоянного тока с волновой обмоткой якоря. При этом достигается устойчивая работа двигателя в значительном диапазоне скоростей.
Регулирование частоты вращения двигателей постоянного тока посредством изменения подводимого напряжения требует применения специальных схем.
Двигатели постоянного тока по сравнению с асинхронными значительно тяжелее и в несколько раз дороже. К. п. д. этих двигателей ниже, а эксплуатация их более сложна.
Промышленные предприятия получают энергию трехфазного тока, и для получения постоянного тока требуются специальные преобразователи. Это связано с добавочными потерями энергии. Основной причиной применения для привода металлорежущих станков двигателей постоянного тока с параллельным возбуждением является возможность практически бесступенчатого и экономичного регулирования их частоты вращения.
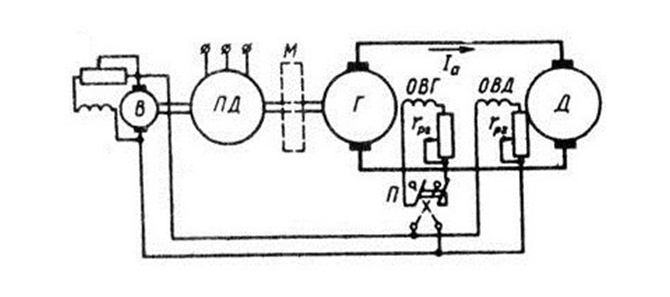
В станкостроении применяют комплектные приводы с выпрямителями и двигателем постоянного тока с параллельным возбуждением (рис. 1). Посредством реостата PC изменяют силу тока возбуждения электродвигателя, обеспечивая практически бесступенчатое регулирование его частоты вращения в диапазоне 2:1. В комплект привода входит пусковой реостат РП, а также аппаратура защиты, на рис. 1 не показанная.
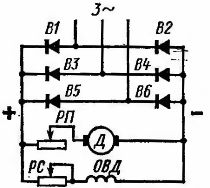
Рис. 1. Схема электропривода постоянного тока с выпрямителем
В ыпрямители (B1 — В6), погруженные в трансформаторное масло, и всю аппаратуру помещают в шкафу управления, а реостат PC устанавливают в месте, удобном для обслуживания.
Регулировка оборотов электродвигателя 220В, 12В и 24В
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор – регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
Способы изменения вращения зависят от модели электрической машины. Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно.
Простейший вариант
 Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Это самый неэкономичный вариант. Механические характеристики двигателя с независимым возбуждением самые невыгодные из-за больших потерь, результатом чего является падение механической мощности, КПД.
Еще одна возможность – введение реостата в обмотку возбуждения. Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов. Это происходит ввиду насыщения обмотки.
Итак, реостатное регулирование скорости вращения аппарата независимого возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа при таком включении буде периодической.
В цепи якоря
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.
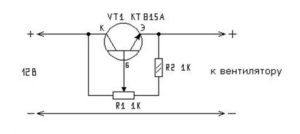
Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
![]()
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12–0в. Как результат – можно убрать крутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
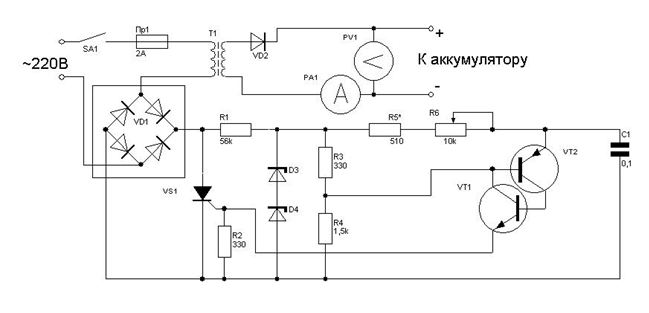
Есть еще один вариант, только это уже не для 12, а для 24в питания.
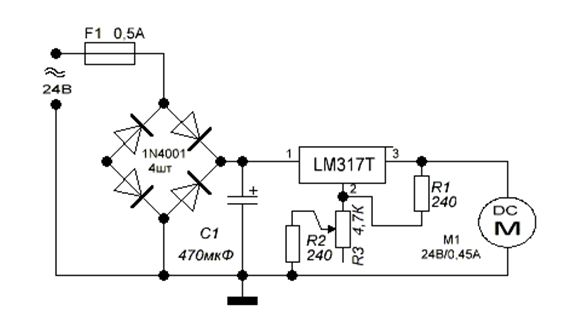
Двигатель постоянного тока, питание – переменное, так как стоит диодный мост. При желании можно мост выбросить и запитывать постоянкой от своего блока питания.
От сети
Однофазные электродвигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины
 Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания. Для этой цели также есть свои решения.
Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания. Для этой цели также есть свои решения.
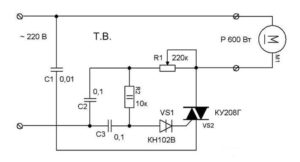
Конструкция подключается непосредственно к сети. Регулировочный элемент – симистор, управление которого осуществляется динистором. Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Если есть подходящий ЛАТР, можно все это делать при помощи его.
Двухфазный двигатель
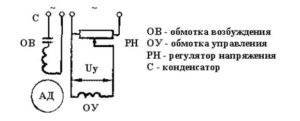 Аппарат, имеющий две обмотки – пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Аппарат, имеющий две обмотки – пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Есть две возможности контролирования числа оборотов:
- Менять амплитуду напряжения питания (Uy),
- Фазное – меняем емкость конденсатора.
Такие агрегаты широко распространены в быту и на производстве.
Обычные асинхронники
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
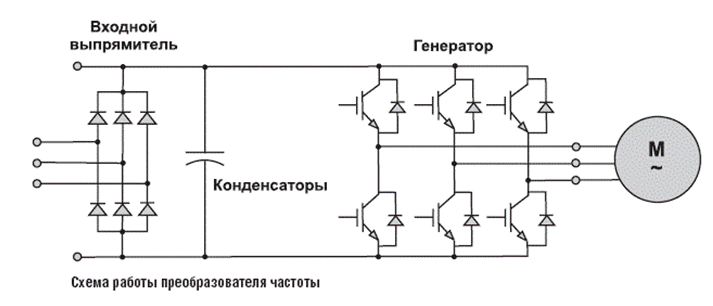
Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь – самое лучшее решение для таких двигателей.
Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
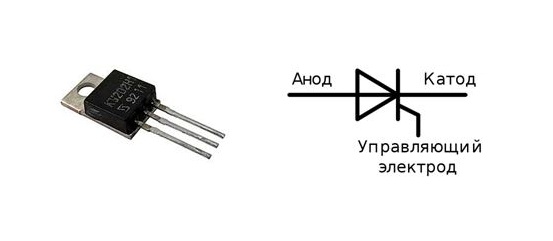
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
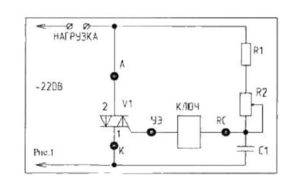 Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключах
Тиристорные регуляторы мощности являются одними из самых распространенных, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
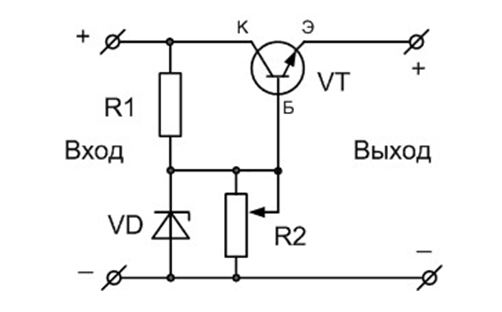
Схема стабилизатора постоянного тока
Зарядное устройство 24 вольт на тиристоре
Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Процесс пропорциональных сигналов
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
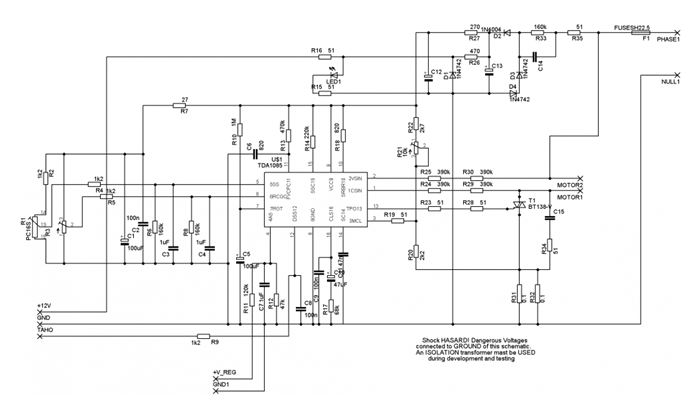
Микросхема TDA 1085
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
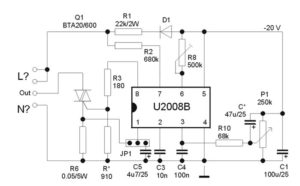 Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Измерения
Понятно, что число оборотов нужно как-то определять. Для этого используют тахометры. Они показывают число вращения на данный момент. Обычным мультиметром просто так измерить скорость не получится, разве что на автомобиле.
Как видно, на электрических машинах можно менять различные параметры, подстраивая их под нужды производства и домашнего хозяйства.