Исполнительные двигатели и тахогенераторы постоянного тока
Исполнительные двигатели постоянного тока
 Исполнительные двигатели постоянного тока — маломощные машины, используемые в автоматике и телемеханике, в системах автоматического управления, регулирования и- контроля автоматизированных установок, где они преобразуют электрический сигнал измерительного органа — напряжение управления — в угловое перемещение вала для воздействия на управляющий, регулирующий или контролирующий аппарат. В тех случаях, когда поступающий сигнал недостаточен для приведения в действие исполнительного двигателя, применяют магнитный или полупроводниковый усилитель мощности.
Исполнительные двигатели постоянного тока — маломощные машины, используемые в автоматике и телемеханике, в системах автоматического управления, регулирования и- контроля автоматизированных установок, где они преобразуют электрический сигнал измерительного органа — напряжение управления — в угловое перемещение вала для воздействия на управляющий, регулирующий или контролирующий аппарат. В тех случаях, когда поступающий сигнал недостаточен для приведения в действие исполнительного двигателя, применяют магнитный или полупроводниковый усилитель мощности.
Исполнительные двигатели обычно работают в условиях частых пусков, остановок и реверсов. Они отличаются значительным начальным пусковым моментом и быстродействием. Зависимости вращающего момента и скорости якоря от напряжения управления у них в большинстве случаев близки к линейным.
 В зависимости от системы питания цепей двигателя различают исполнительные двигатели с якорным управлением и с полюсным управлением. При якорном управлении обмоткой управления является обмотка якоря, в связи с чем напряжение управления подводят к ее зажимам, а неизменный ток возбуждения обеспечивает независимый источник электрической энергии постоянного напряжения. В случае полюсного управления обмоткой управления служит обмотка возбуждения главных полюсов и напряжение управления подводят к ее зажимам, а напряжение на зажимах якоря, задаваемое независимым источником электрической энергии постоянного напряжения, сохраняется неизменным .
В зависимости от системы питания цепей двигателя различают исполнительные двигатели с якорным управлением и с полюсным управлением. При якорном управлении обмоткой управления является обмотка якоря, в связи с чем напряжение управления подводят к ее зажимам, а неизменный ток возбуждения обеспечивает независимый источник электрической энергии постоянного напряжения. В случае полюсного управления обмоткой управления служит обмотка возбуждения главных полюсов и напряжение управления подводят к ее зажимам, а напряжение на зажимах якоря, задаваемое независимым источником электрической энергии постоянного напряжения, сохраняется неизменным .
Обычно используют якорное управление. Изменение полярности напряжения управления вызывает противоположное направление вращения якоря.
Исполнительные двигатели постоянного тока изготовляют номинальной мощности от долей ватта до 600 Вт нормальной и специальной конструкций.
 Двигатели нормальной конструкции аналогичны машинам постоянного тока общего применения, но отличаются от них тем, что станина с главными полюсами так же, как и якорь, собрана из тонких изолированных друг от друга листов электротехнической стали, что способствует улучшению свойств этих машин в переходных режимах. Кроме того, добавочные полюсы в этих машинах отсутствуют, так как реакция якоря невелика и процессы коммутации вполне удовлетворительны. Поскольку скорость якоря небольшая, вентилятор на валу таких двигателей не предусмотрен.
Двигатели нормальной конструкции аналогичны машинам постоянного тока общего применения, но отличаются от них тем, что станина с главными полюсами так же, как и якорь, собрана из тонких изолированных друг от друга листов электротехнической стали, что способствует улучшению свойств этих машин в переходных режимах. Кроме того, добавочные полюсы в этих машинах отсутствуют, так как реакция якоря невелика и процессы коммутации вполне удовлетворительны. Поскольку скорость якоря небольшая, вентилятор на валу таких двигателей не предусмотрен.
К двигателям специальной конструкции относятся магнитоэлектрические машины с возбуждением основного магнитного поля с помощью постоянных магнитов, а также малоинерционные машины, отличающиеся конструкцией якоря. К последним относятся: двигатели с полым немагнитным якорем — полым тонкостенным цилиндром из пластмассы с запрессованной обмоткой из медного провода с внутренним неподвижным ферромагнитным магнитопроводом, укрепленным на подшипниковом щите, и менее долговечные двигатели с дисковым якорем — тонким немагнитным диском из керамики, текстолита, стекла, а иногда из алюминия с печатной обмоткой, представляющей совокупность радиально расположенных по обе стороны диска проводников из медной фольги, по которой скользят серебряно-графитные щетки. Названные конструкции отличаются малым моментом инерции якоря, что обеспечивает высокое быстродействие исполнительного двигателя.

Масса исполнительных двигателей постоянного тока в 2 — 4 раза меньше, чем масса одинаковых по номинальной мощности исполнительных асинхронных двигателей, а к. п. д. их при номинальной мощности 5. 10 Вт составляет около 0,3 и достигает значения 0,65 и несколько выше для двигателей номинальной мощностью 200 — 300 Вт.

Тахогенераторы постоянного тока
 Тахогенераторы постоянного тока — машины небольшой мощности, предназначенные для преобразования механической величины в электрический сигнал — выходное напряжение. В частности, их используют для контроля и измерения скорости вала исполнительного устройства, с которым соединен вал тахогенератора, зажимы якоря которого соединены с измерительным прибором. Помимо этого, тахогенераторы применяют в электромеханических счетно-решающих устройствах для выполнения вычислительных операций, а также в устройствах автоматической отработки генерируемых ускоряющих и успокаивающих сигналов.
Тахогенераторы постоянного тока — машины небольшой мощности, предназначенные для преобразования механической величины в электрический сигнал — выходное напряжение. В частности, их используют для контроля и измерения скорости вала исполнительного устройства, с которым соединен вал тахогенератора, зажимы якоря которого соединены с измерительным прибором. Помимо этого, тахогенераторы применяют в электромеханических счетно-решающих устройствах для выполнения вычислительных операций, а также в устройствах автоматической отработки генерируемых ускоряющих и успокаивающих сигналов.
Тахогенераторы бывают магнитоэлектрические с возбуждением основного магнитного поля с помощью постоянных магнитов и электродинамические с электромагнитным возбуждением, обусловленным М. д. с. обмотки возбуждения, питаемой от независимого источника электрической энергии постоянного напряжения.
Выходное напряжение тахогенератора в режиме холостого хода изменяется линейно в зависимости от скорости якоря, а при нагрузке эта линейность несколько нарушается, причем тем больше, чем меньшим сопротивлением обладает измерительный прибор, присоединенный к зажимам якоря. Все же для каждого тахогенератора существует относительно небольшой диапазон измеряемых скоростей, в пределах которого при определенном достаточно большом сопротивлении измерительного прибора и неизменных условиях цепи возбуждения выходную характеристику можно считать практически линейной.
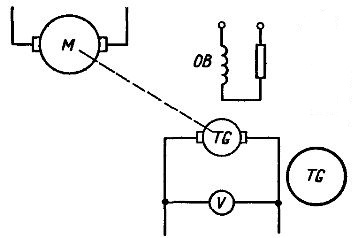
Схема включения тахогенератора постоянного тока независимого возбуждения
 Существенный недостаток тахогенераторов постоянного тока — пульсация выходного напряжения из-за незначительного периодического изменения магнитного потока вследствие неравномерности воздушного зазора и неравенства проводимостей якоря в различных радиальных направлениях, в том числе обусловленных зубчатой конструкцией его магнитопровода, а также из-за вибрации щеток, неровностей и эллиптичности коллектора и коммутационных процессов — в значительной мере устранен в тахогенераторе с полым якорем, который устроен так же, как и малоинерционный исполнительный двигатель постоянного тока с аналогичным якорем.
Существенный недостаток тахогенераторов постоянного тока — пульсация выходного напряжения из-за незначительного периодического изменения магнитного потока вследствие неравномерности воздушного зазора и неравенства проводимостей якоря в различных радиальных направлениях, в том числе обусловленных зубчатой конструкцией его магнитопровода, а также из-за вибрации щеток, неровностей и эллиптичности коллектора и коммутационных процессов — в значительной мере устранен в тахогенераторе с полым якорем, который устроен так же, как и малоинерционный исполнительный двигатель постоянного тока с аналогичным якорем.
Неточность установки щеток по геометрической нейтрали коллектора тахогенсратора приводит к асимметрии выходного напряжения, т. е. к генерированию двух различных напряжений в обмотке якоря при противоположных направлениях его вращения с одинаковой скоростью. При правильном расположении щеток асимметрия напряжений находится в пределах от 0,3 до 1% номинального напряжения тахогенератора.
Асинхронные исполнительные двигатели
Асинхронные исполнительные двигатели используют в системах автоматического управления для управления и регулирования различных устройств.
Асинхронные исполнительные двигатели начинают действовать при подаче им электрического сигнала, который они преобразуют в заданный угол поворота вала или в его вращение. Снятие сигнала приводит к немедленному переходу ротора исполнительного двигателя в неподвижное состояние без использования каких-либо тормозных устройств. Работа таких двигателей протекает все время в условиях переходных режимов, в результате чего скорость ротора зачастую при кратковременном сигнале не достигает установившегося значения. Этому способствуют также частые пуски, изменения направления вращения и остановки.
По конструктивному оформлению исполнительные двигатели представляют собой асинхронные машины с двухфазной обмоткой статора, выполненной так, что магнитные оси ее двух фаз сдвинуты в пространстве относительно друг друга не угол 90 эл. град.
Одна из фаз обмотки статора является обмоткой возбуждении и имеет выводы к зажимам с обозначение ми C1 и С2. Другая, выполняющая роль обмотки управления, имеет выводы, присоединенные к зажимам с обозначениями У1 и У2.
К обеим фазам обмотки статора подводят соответствующие переменные напряжения одинаковой частоты. Так, цепь обмотки возбуждения присоединяют к питающей сети с неизменным напряжением U, а в цепь обмотки управления подают сигнал в виде напряжения управления U у (рис. 1, а, б, в).
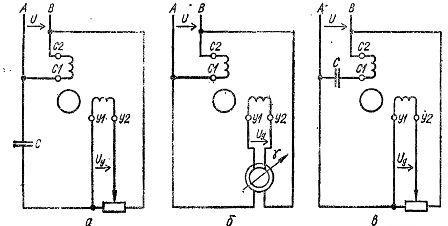
Рис. 1. Схемы включения асинхронных исполнительных двигателей при управлении: а — амплитудном, б — фазовом, в — амплитудно-фазовом.
В результате этого в обеих фазах обмотки статора возникают соответствующие токи, которые благодаря включенным фазосдвигающим элементам в виде конденсаторов или фазорегулятора сдвинуты относительно друг друга во времени, что приводит к возбуждению эллиптического вращающего магнитного поля, которое вовлекает короткозамкнутый ротор во вращение.
 При изменении режимов работы двигателя эллиптическое вращающееся магнитное поле в предельных случаях переходит в переменное с неподвижной осью симметрии или в круговое вращающееся, что сказывается на свойствах двигателя.
При изменении режимов работы двигателя эллиптическое вращающееся магнитное поле в предельных случаях переходит в переменное с неподвижной осью симметрии или в круговое вращающееся, что сказывается на свойствах двигателя.
Пуск, регулирование скорости и остановка исполнительных двигателей определяются условиями формирования магнитного поля путем амплитудного, фазового и амплитудно-фазового управления.
При амплитудном управлении напряжение U на зажимах обмотки возбуждения поддерживают неизменным, а изменяют только амплитуду напряжения Uy. Сдвиг фаз между этими напряжениями, благодари исключенному конденсатору, равен 90° (рис. 1, а).
Фазовое управление харакрно тем, что напряжения U и Uy остаются неизменными, а сдвиг фаз между ними регулируют поворотом ротора фазорегулятора (рис. 1, б).
При амплитудно-фазовом управлении, хотя регулируют только амплитуду напряжения Uy, но при этом, из-за наличия конденсатора в цепи возбуждения и электромагнитного взаимодействия фаз обмотки статора, происходит одновременное изменение фазы напряжения на зажимах обмотки возбуждения и сдвига фаз между этим напряжением и напряжением на зажимах обмотки управления (рис. 1, в).
Иногда кроме конденсатора в цепи обмотки возбуждения предусматривают еще конденсатор в цепи обмотки управления, что компенсирует реактивную намагничивающую мощность, снижает потери энергии и улучшает, механические характеристики асинхронного исполнительного двигателя.
При амплитудном управлении круговое вращающееся магнитное поле наблюдается при номинальном сигнале независимо от скорости ротора, а при уменьшении его оно становится эллиптическим. В случае фазового управления круговое вращающееся магнитное поле возбуждается только при номинальном сигнале и сдвиге фаз между напряжениями U и Uy равным 90° независимо от скорости ротора, а при ином сдвиге фаз оно становится эллиптическим. При амплитудно-фазовом управлении круговое вращающееся магнитное поле существует только при одном режиме — при номинальном сигнале в момент пуска двигателя, а затем по мере разгона ротора оно переходит в эллиптическое.
При всех способах управления скорость ротора регулируют изменением характера вращающегося магнитного поля, а перемену направления вращения ротора осуществляют изменением фазы напряжения, подведенного к зажимам обмотки управления, на 180°.
 К асинхронным исполнительным исполнительным двигателям предъявляют специфические требования в части отсутствия самохода, обеспечения широкого диапазона регулирования скорости ротора, быстродействия, большого начального пускового момента и малой мощности управления при относительном сохранении линейности их характеристик.
К асинхронным исполнительным исполнительным двигателям предъявляют специфические требования в части отсутствия самохода, обеспечения широкого диапазона регулирования скорости ротора, быстродействия, большого начального пускового момента и малой мощности управления при относительном сохранении линейности их характеристик.
Самоход асинхронных исполнительных двигателей проявляется в виде самопроизвольного вращения ротора при отсутствии сигнала управления. Он обусловлен либо недостаточно большим активным сопротивлением обмотки ротора — методический самоход, либо некачественным исполнением самого двигателя — технологический самоход.
Первый устраним при проектировании двигателей, предусматривающем изготовление ротора с повышенным сопротивлением обмотки и критическим скольжением sкр = 2 — 4, что, кроме того, обеспечивает широкий устойчивый диапазон регулирования скорости ротора, а второй — качественным изготовлением магнитопроводов и обмоток машин при тщательной их сборке.
Так как асинхронные исполнительные двигатели с ротором, имеющим короткозамкнутую обмотку с повышенным активным сопротивлением, отличаются небольшим быстродействием, характеризуемым электромеханической постоянной времени — временем набора ротором скорости от нулевой до половины синхронной — Тм = 0,2 — 1,5 с, то в установках автоматического управления предпочтение отдают исполнительным двигателям с полым немагнитным ротором, у которых электромеханическая постоянная времени имеет меньшее значение — Тм = 0,01 — 0,15 с.
Асинхронные исполнительные двигатели с полым немагнитным ротором, отличающиеся высоким быстродействием, имеют как внешний статор с магнитопроводом обычной конструкции и двухфазной обмоткой с фазами, выполняющими роль обмоток возбуждения и управления, так и внутренний статор в виде шихтованного ферромагнитного полого цилиндра, укрепленного на подшипниковом щите двигателя.
Поверхности статоров разделены воздушным зазором, который в радиальном направлении имеет размер 0,4 — 1,5 мм. В воздушном зазоре находится стакан из алюминиевого сплава со стенкой толщиной 0,2 — 1 мм, укрепленный на валу двигателя. Ток холостого хода асинхронных двигателей с полым немагнитным ротором велик и доходит до 0,9 I ном, а номинальный кпд = 0,2 — 0,4.
В установках автоматики и телемеханики применяют двигатели с полым ферромагнитным ротором, у которого толщина стенки 0.5 — 3 мм. В этих машинах, используемых в качестве исполнительных и вспомогательных двигателей, внутренний статор отсутствует, а ротор укреплен на одной запрессованной или двух торцовых металлических пробках.
 Воздушный зазор между поверхностями статора и ротора в радиальном направлении составляет всего 0,2 — 0,3 мм.
Воздушный зазор между поверхностями статора и ротора в радиальном направлении составляет всего 0,2 — 0,3 мм.
Механические характеристики двигателей с полым ферромагнитным ротором ближе к линейным, чем характеристики двигателей с ротором, имеющим обычную короткозамкнутую обмотку, а также с ротором, выполненным в виде полого немагнитного цилиндра.
Иногда внешнюю поверхность полого ферромагнитного ротора покрывают слоем меди толщиной 0,05 — 0,10 мм, а его торцовые поверхности — слоем меди до 1 мм для увеличения номинальных мощности и момента двигателя, однако кпд его при этом несколько уменьшается.
Существенными недостатками двигателей с полым ферромагнитным ротором является одностороннее прилипание ротора к магнитопроводу статора из-за неравномерности воздушного зазора, чего не бывает в машинах с полым немагнитным ротором. Самоход у двигателей с полым ферромагнитным ротором отсутствует, они устойчиво работают в диапазоне скоростей от нулевой до синхронной скорости ротора.
Асинхронные исполнительные двигатели с массивным ферромагнитным ротором выполненным в виде стального или чугуного цилиндра без обмотки, отличаю простотой конструкции, высокой прочностью, большим пусковым моментом, устойчивостью работы на заданной скорости и могут быть использованы при очень высоких скоростях ротора.
Существуют обращенные двигатели с массивным ферромагнитным ротором, который выполнен в вид наружной вращающейся части.
Асинхронные исполнительные двигатели изготавливают на номинальную мощность от долей до нескольких сотен ватт и предназначают для питания от источников переменного напряжения с частотой 50 Гц, а также повышенных частот до 1000 Гц и выше.
Читайте также: Сельсины: назначение, устройство, принцип действия