3d-принтер и ЧПУ станок в одном устройстве своими руками
Блог для тех, у кого чешутся руки и есть желание заниматься цифровой техникой и не только цифровой и не только техникой.
Страницы
воскресенье, 1 июня 2014 г.
3. Изготовление драйвера шагового двигателя (для экспериментов).

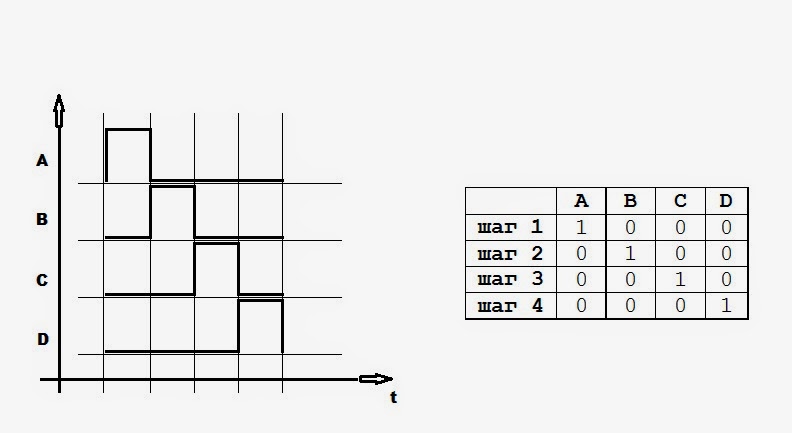
Получается если повторять эту последовательность сигналов ABCD можно вращать ротор электромотора в одну сторону.
А как вращать ротор в другую сторону? Да очень просто, нужно изменить последовательность сигналов с ABCD на DCBA.
А как поворачивать ротор на конкретный заданный угол, например 30 градусов? У каждой модели шагового электромотора есть такой параметр как число шагов. У шаговиков которые я вытащил из матричных принтеров этот параметр 200 и 52, т.е. чтобы совершить полный оборот 360 градусов одним двигателям нужно пройти 200 шагов а другим 52. Получается чтобы повернуть ротор на угол 30 градусов, нужно пройти:
-в первом случае 30:(360:200)=16,666. (шагов) можно округлить до 17 шагов;
-во втором случае 30:(360:52)=4,33. (шага), можно округлить до 4 шагов.
Как видите есть достаточно большая погрешность, можно сделать вывод что чем больше шагов у мотора тем меньше погрешность. Погрешность можно уменьшать если использовать полушаговый или микрошаговый режим работы или механическим способом — использовать понижающий редуктор в этом случае страдает скорость движения.
Как управлять скоростью вращения ротора? Достаточно изменить длительность импульсов подаваемых на входы ABCD, чем длиннее импульсы по оси времени, тем меньше скорость вращения ротора.
Полагаю этой информации будет достаточно чтобы иметь теоретическое представление о работе шаговых электромоторов, все остальные знания можно будет получить экспериментируя.
И так перейдем к схемотехнике. Как работать с шаговым двигателем мы разобрались, осталось подключить его к Arduino и написать управляющую программу. К сожалению напрямую подключить обмотки мотора к выходам нашего микроконтроллера невозможно по одной простой причине — нехватка мощности. Любой электромотор пропускает через свои обмотки достаточно большой ток, а к микроконтроллеру можно подключить нагрузку не более 40 mA (параметры ArduinoMega 2560). Что же делать если есть необходимость управлять нагрузкой например 10A да еще и напряжением 220В? Эту проблему можно решить если между микроконтроллером и шаговым двигателем интегрировать силовую электрическую схему, тогда можно будет управлять хоть трехфазным электромотором который открывает многотонный люк в ракетную шахту :-). В нашем случае люк в ракетную шахту открывать не нужно, нам нужно всего лишь заставить работать шаговый мотор и в этом нам поможет драйвер шагового двигателя. Можно конечно купить готовые решения, на рынке их очень много, но я буду делать свой собственный драйвер. Для этого мне понадобятся силовые ключевые полевые транзисторы Mosfet, как я уже говорил эти транзисторы идеально подходят для сопряжения Arduino с любыми нагрузками.
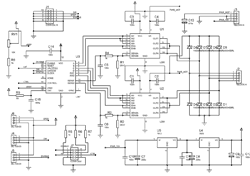
На рисунке ниже представлена электрическая принципиальная схема контроллера шагового двигателя.
В качестве силовых ключей я применил транзисторы IRF634B максимальное напряжение исток-сток 250В, ток стока 8,1А, этого более чем достаточно для моего случая. Со схемой более менее разобрались будем рисовать печатную плату. Рисовал в встроенном в Windows редакторе Paint, скажу это не самая лучшая затея, в следующий раз буду использовать какой-нибудь специализированный и простой редактор печатных плат. Ниже представлен рисунок готовой печатной платы.
Далее это изображение в зеркальном отражении распечатываем на бумаге при помощи лазерного принтера. Яркость печати лучше всего сделать максимальной, а бумагу нужно использовать не обычную офисную а глянцевую, подойдут обычные глянцевые журналы. Берем лист и печатаем поверх имеющегося изображения. Далее получившуюся картинку прикладываем к заранее подготовленному куску фольгированного стеклотекстолита и хорошенько проглаживаем утюгом в течении 20 минут. Утюг нужно нагреть до максимальной температуры.
Как подготовить текстолит? Во первых его нужно отрезать по размеру изображения печатной платы (при помощи ножниц по металлу или ножовкой по металлу), во вторых зашкурить края мелкой наждачной бумагой, чтобы не осталось заусенцев. Также необходимо пройтись наждачкой по поверхности фольги, снять окислы, фольга приобретет ровный красноватый оттенок. Далее поверхность обработанную наждачной бумагой нужно протереть ваткой смоченной в растворитель (используйте 646 растворитель он меньше воняет).
После прогрева утюгом, тонер с бумаги запекается на поверхность фольгированного стеклотекстолита в виде изображения контактных дорожек. После этой операции плату с бумагой необходимо остудить до комнатной температуры и положить в ванночку с водой примерно на 30 минут. За это время бумага раскиснет и ее нужно аккуратно скатать подушечками пальцев с поверхности текстолита. На поверхности останутся ровные черные следы в виде контактных дорожек. Если у вас не получилось перенести изображение с бумаги и у вас есть огрехи, тогда следует смыть тонер с поверхности текстолита растворителем и повторить все заново. У меня все получилось с первого раза.
После получения качественного изображения дорожек, необходимо вытравить лишнюю медь, для этого нам понадобится травильный раствор который мы приготовим сами. Раньше для травления печатных плат я использовал медный купорос и обычную поваренную соль в соотношении на 0,5 литра горячей воды по 2 столовые ложки с горкой медного купороса и поваренной соли. Все это тщательно размешивалось в воде и раствор готов. Но в этот раз попробовал иной рецепт, очень дешевый и доступный.
Рекомендуемый способ приготовления травильного раствора:
В 100 мл аптечной 3% перекиси водорода растворяется 30 г лимонной кислоты и 2 чайные ложки поваренной соли. Этого раствора должно хватить для травления площади 100 см2. Соль при подготовке раствора можно не жалеть. Так как она играет роль катализатора и в процессе травления практически не расходуется.
После приготовления раствора, печатную плату необходимо опустить в емкость с раствором и наблюдать за процессом травления, тут главное не передержать. Раствор съест непокрытую тонером поверхность меди, как только это произойдет плату необходимо достать и промыть холодной водой, далее ее нужно просушить и снять с поверхности дорожек тонер при помощи ватки и растворителя. Если в вашей плате предусмотрены отверстия для крепления радиодеталей или крепежа, самое время просверлить их. Я опустил эту операцию по причине того что это всего лишь макетный драйвер шагового двигателя, предназначенный для освоения новых для меня технологий.
Приступаем к лужению дорожек. Это необходимо сделать чтобы облегчить себе работу при пайке. Раньше я лудил при помощи припоя и канифоли, но скажу это «грязный» способ. От канифоли много дыма и шлака на плате который нужно будет смывать растворителем. Я применил другой способ, лужение глицерином. Глицерин продается в аптеках и стоит копейки. Поверхность платы необходимо протереть ваткой смоченной в глицерине и наносить припой паяльником точными мазками. Поверхность дорожек покрывается тонким слоем припоя и остается чистой, лишний глицерин можно удалить ваткой или промыть плату в воде с мылом. К сожалению у меня нет фотографии полученного результата, после лужения, но получившееся качество впечатляет.
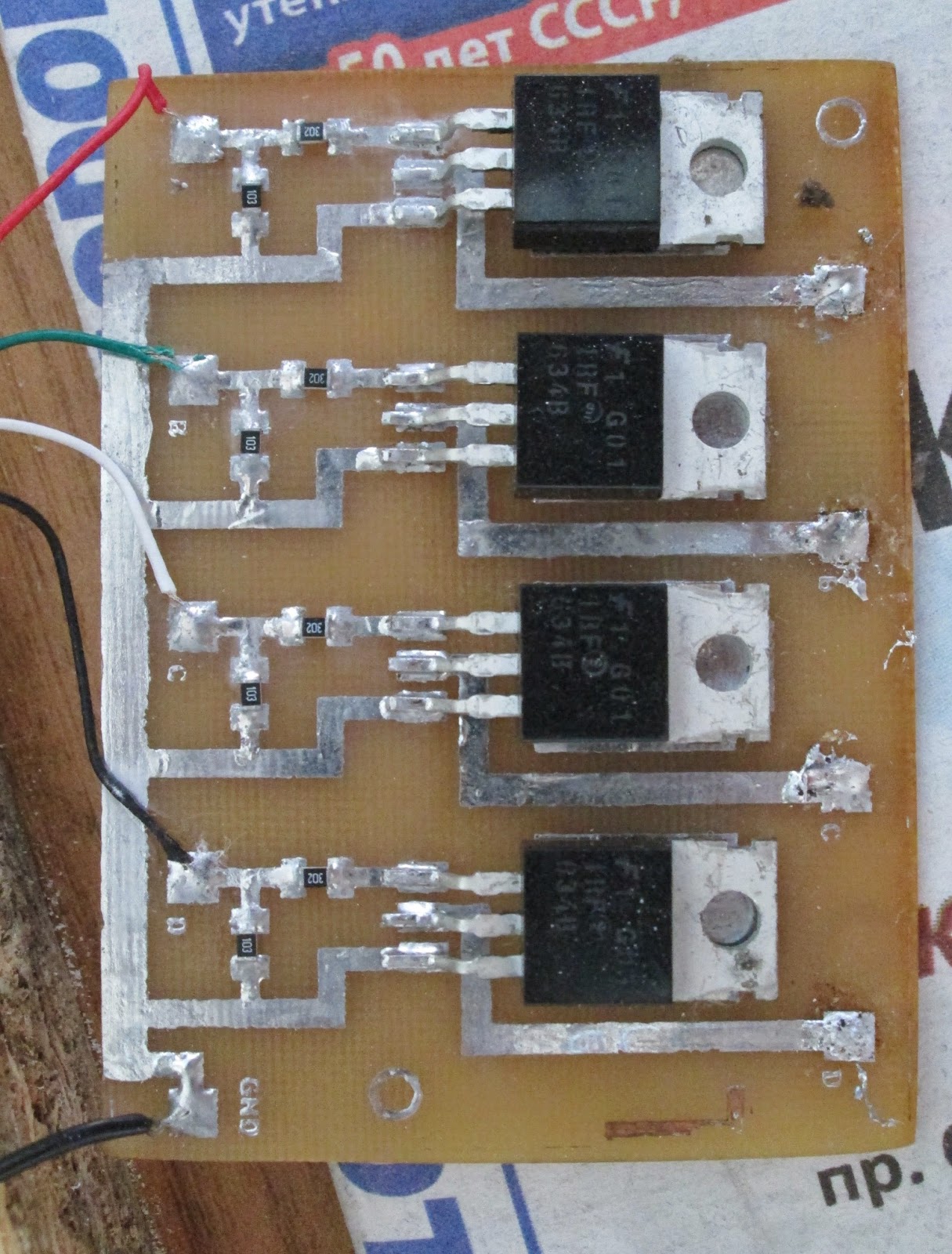
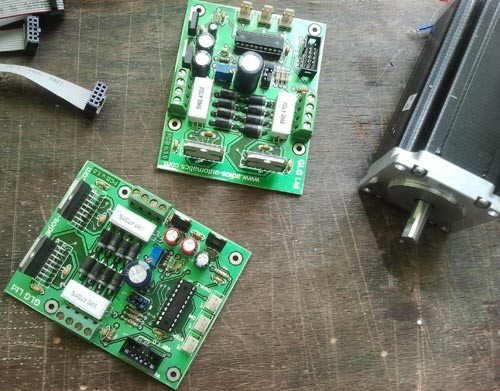
Далее необходимо припаять все радиодетали на плату, для пайки SMD компонентов я использовал пинцет. В качестве флюса использовал глицерин. Получилось очень даже аккуратно.
Результат налицо. Конечно после изготовления плата выглядела лучше, на фото она уже после многочисленных экспериментов (для этого она и создавалась).
Листинг программы:
/*
* Тестовая программа для шаговика
*/
#include
#define STEPS 200
Stepper stepper(STEPS, 31, 33, 35, 37);
void setup()
<
stepper.setSpeed(50);
>
void loop()
<
stepper.step(200);
delay(1000);
>
Данная управляющая программа заставляет делать один полный оборот вала шагового двигателя, после перерыва длительностью в одну секунду, повторяется до бесконечности. Можно поэкспериментировать со скоростью вращения, направлением вращения а также углами поворотов.
Драйвер шагового двигателя (версия 2)
Драйвер биполярных шаговых двигателей
Ниже представлена принципиальная схема драйвера биполярных шаговых двигателей с двумя L298 (усиленный) 48В, 4А.
Данный драйвер может использоваться для управления практически любых 2-фазных биполярных гибридных шаговиков с 4 выводами и может обеспечить ток работы до 4 ампер при максимальном напряжении 35В.
Драйвер поддерживает режимы работы full step и half step которые можно выбрать с помощю джапмпера H/F. Джампер CTRL предназначен для установки типа двигателя униполярный/биполярный, в позиции биполярного ШИМ работает на выходы INHIBIT в противном случае на выходы ABCD. Питание драйвера 12-35В для двигателя и 15-24В для схемы, диоды D1-D8 быстрые на 3 ампера, желательно Шоттки. Цепочкой R9 и C15 можно подбирать частоту ШИМ, при указанных номиналах она выше диапазона слышимых звуков, так что движок не жужжит. Потенциометром RV1 устанавливается рабочий ток двигателя.
Если будете гонять на максимальной мощности , то нужно обязательно посадить его на хороший радиатор и поставить кулер, также не забудьте намазать термопастой.
Схема и плата нарисованы в программе Proteus 7.7.
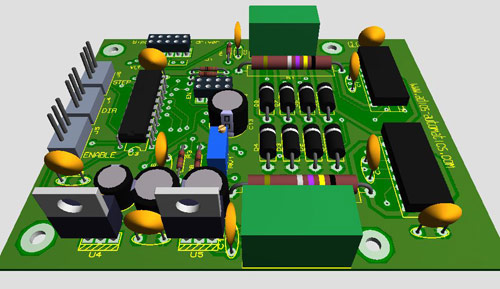
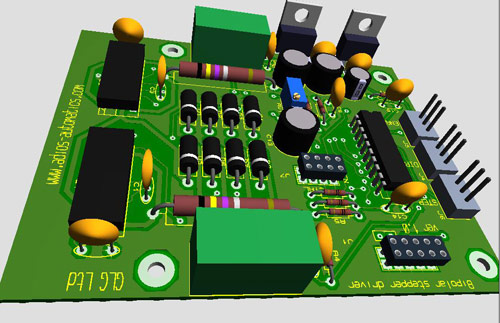
Схема протестированна и показала полную работоспособность драйвера


Используемые радиоэлементы:
Простой в изготовлении контроллер шагового двигателя из старых деталей
Шаг 1.
От старого сканера:
- 1 шаговый двигатель
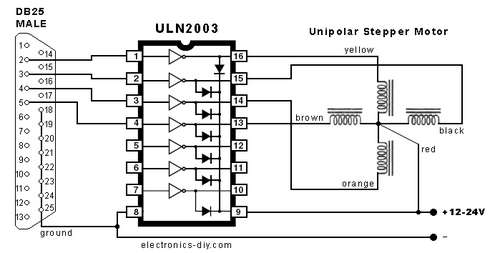
- 1 микросхема ULN2003
- 2 стальных прута
Для корпуса: — 1 картонная коробка
- Клеевой пистолет
- Кусачки
- Ножницы
- Принадлежности для пайки
- Краска
- 1 разъем DB-25 — провод
- 1 цилиндрическое гнездо для питания постоянного тока Для испытательного стенда
- 1 стержень с резьбой
- 1 подходящая под стержень гайка — разные шайбы и шурупы — куски древесины
Для управляющего компьютера:
- 1 старый компьютер (или ноутбук)
- 1 копия TurboCNC ( отсюда)
Шаг 2.
Берем детали от старого сканера. Чтобы построить собственный ЧПУ контроллер нужно для начала извлечь из сканера шаговый двигатель и плату управления. Здесь не приведено никаких фотографий, потому что каждый сканер выглядит по-своему, но обычно нужно просто снять стекло и вывернуть несколько винтов. Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.
Шаг 3.
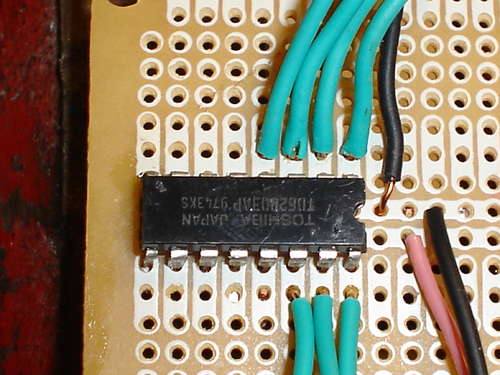
Извлекаем микросхему из платы управления Теперь нужно найти на плате управления шаговым двигателем микросхему ULN2003. Если вы не смогли обнаружить ее на своем устройстве, ULN2003 можно купить отдельно. Если она есть, ее нужно выпаять. Это потребует некоторого умения, но не так уж сложно. Сначала при помощи отсоса удалите как можно больше припоя. После этого осторожно просуньте под микросхему конец отвертки. Осторожно прикоснитесь концом паяльника к каждому выводу, продолжая при этом нажимать на отвертку.

Шаг 4.
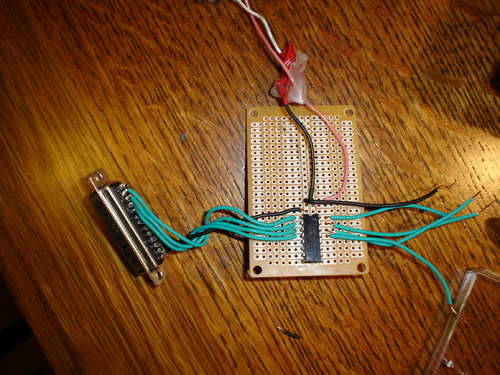
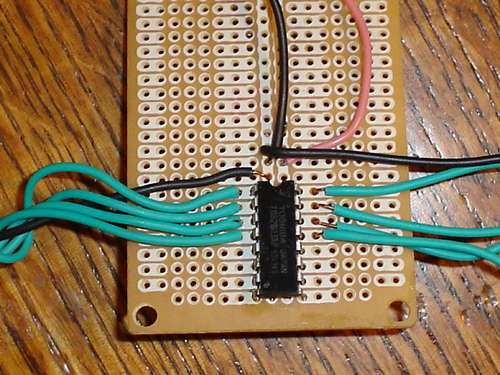
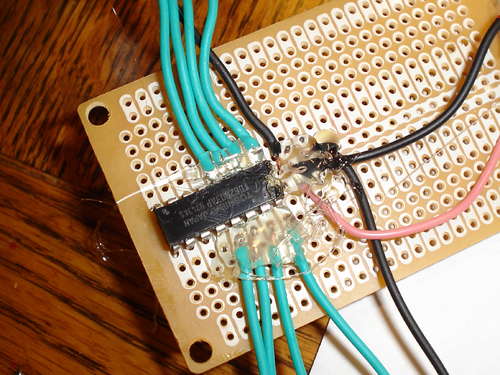
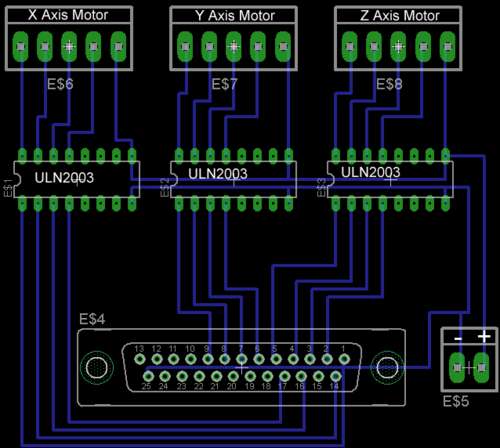
Пайка Теперь нам нужно припаять микросхему на макетную плату. Припаяйте к плате все выводы микросхемы. На показанной здесь макетной плате имеется две шины электропитания, поэтому положительный вывод ULN2003 (смотрите схему здесь и на рисунке ниже) припаивается к одной из них, а отрицательный — к другой. Теперь, нужно соединить вывод 2 коннектора параллельного порта с выводом 1 ULN2003. Вывод 3 коннектора параллельного порта соединяется с выводом 2 ULN2003, вывод 4 — с выводом 3 ULN2003 и вывод 5 — с выводом 4 ULN2003. Теперь вывод 25 параллельного порта припаивается к отрицательной шине питания. Далее к управляющему устройству припаивается мотор. Делать это придется путем проб и ошибок. Можно просто припаять провода так, чтобы потом цеплять на них крокодилы. Еще можно использовать клеммы с винтовым креплением или что-нибудь подобное. Просто припаяйте провода к выводам 16, 15, 14 и 13 микросхемы ULN2003. Теперь припаяйте провод (желательно черный) к положительной шине питания. Управляющее устройство почти готово. Наконец, подсоедините к шинам электропитания на макетной плате цилиндрическое гнездо для питания постоянного тока. Чтобы провода не могли отломаться, их закрепляют клеем из пистолета.


Шаг 5.
Установка программного обеспечения Теперь о программном обеспечении. Единственная вещь, которая точно будет работать с вашим новым устройством — это Turbo CNC. Скачайте его здесь. Распакуйте архив и запишите на CD. Теперь, на компьютере, который вы собираетесь использовать для управления, перейдите на диск C:// и создайте в корне папку «tcnc». Затем, скопируйте файлы с CD в новую папку. Закройте все окна. Вы только что установили Turbo CNC.
Шаг 6.
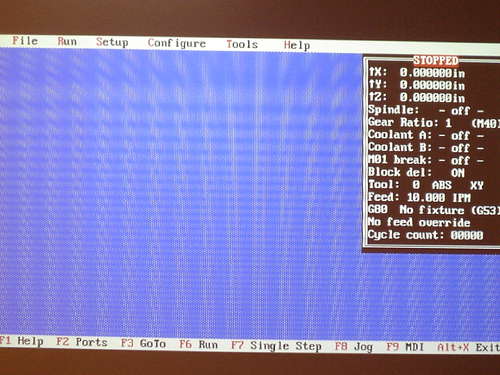
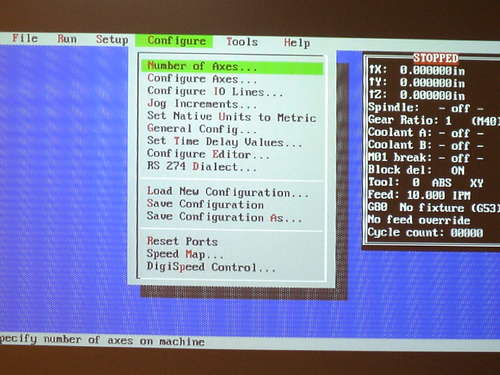
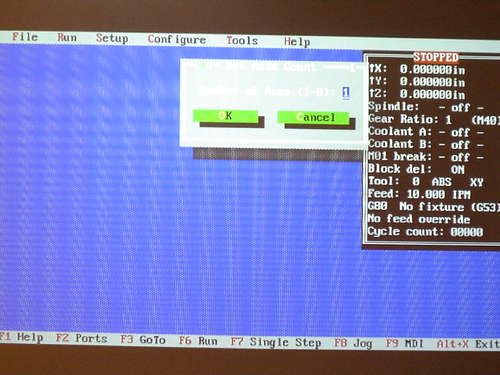
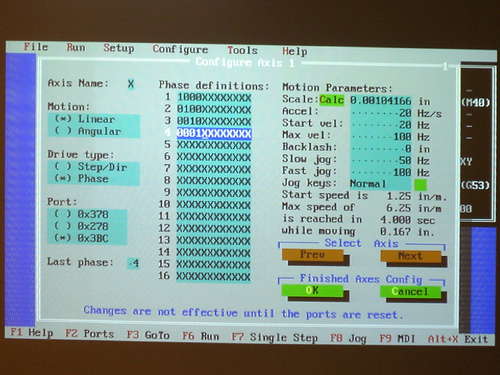
Настройка программного обеспечения Перезагрузите компьютер чтобы перейти к работе в MS-DOS. В командной строке наберите «C: cncTURBOCNC». Иногда лучше использовать загрузочный диск, тогда копия TURBOCNC помещается на него и нужно набирать, соответственно «A: cncTURBOCNC». Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню «Configure». При помощи клавиш со стрелками выберите «number of axis». Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем «1». Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню «Configure» выберите пункт «Configure axes», затем дважды нажмите Enter.
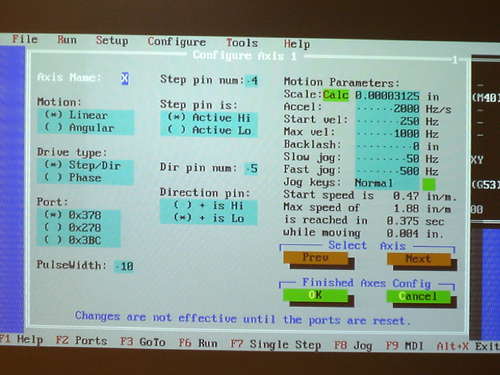
Появится следующий экран. Нажимайте Tab пока не перейдете к ячейке «Drive Type». При помощи стрелки вниз выберите пункт «Phase». Снова при помощи Tab выберите ячейку «Scale». Чтобы использовать калькулятор, нам нужно найти число шагов, которые двигатель делает за один оборот. Зная номер модели двигателя, можно установить на сколько градусов он поворачивается за один шаг. Чтобы найти число шагов, которые двигатель делает за один оборот, теперь нужно поделить 360 на число градусов за один шаг. Например, если мотор поворачивается за один шаг на 7,5 градусов, 360 поделить на 7,5 получится 48. Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
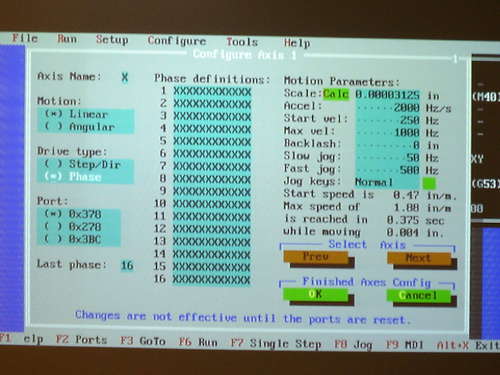
Остальные настройки оставьте как есть. Нажмите OK, и скопируйте число в ячейке Scale в такую же ячейку на другом компьютере. В ячейке Acceleration установите значение 20, поскольку установленных по умолчанию 2000 слишком много для нашей системы. Начальную скорость установите равной 20, а максимальную — 175. Нажимайте Tab пока не дойдете до пункта «Last Phase». Установите в нем значение 4. Нажимайте Tab пока не дойдете до первого ряда иксов.
Скопируйте следующее в четыре первых ячейки:
1000XXXXXXXX
0100XXXXXXXX
0010XXXXXXXX
0001XXXXXXXX
Остальные ячейки оставьте без изменений. Выберите OK. Теперь вы настроили программное обеспечение.

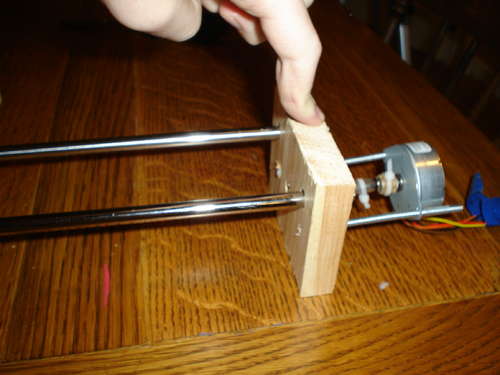
Шаг 7.
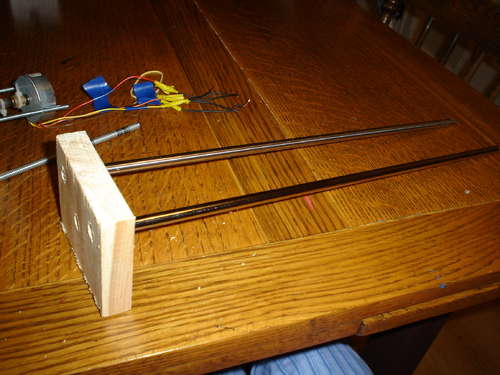
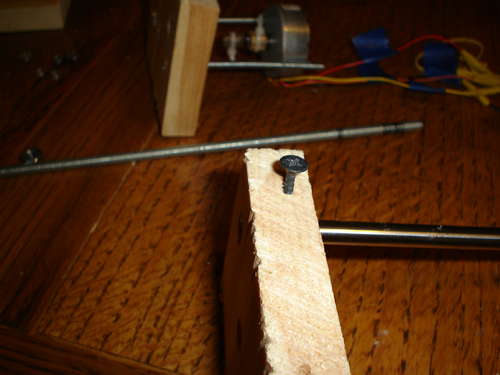
Строим тестовый вал Следующим этапом работы будет сборка простого вала для тестовой системы. Отрежьте 3 бруска дерева и скрепите их друг с другом. Чтобы получить ровные отверстия проведите на поверхности дерева ровную линию. Просверлите на линии два отверстия. Еще 1 отверстие просверлите посередине ниже первых двух. Отсоедините бруски. Через два отверстия, что находятся на одной линии, проденьте стальные пруты. Чтобы закрепить пруты воспользуйтесь небольшими шурупами. Проденьте пруты сквозь второй брусок. На последнем бруске закрепите двигатель. Не имеет значения, как вы это сделаете, будьте изобретательны.
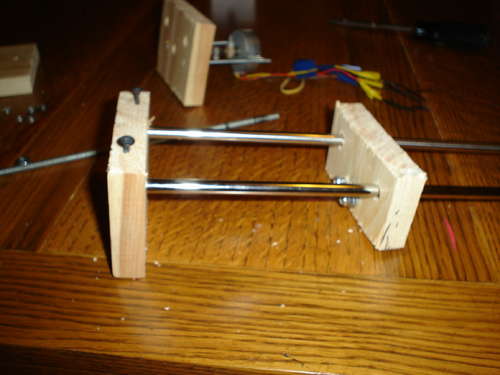
Чтобы закрепить двигатель, имевшийся в наличии, использовали два отрезка стержня с резьбой 1/8. Брусок с прикрепленным двигателем надевается на свободный конец стальных прутов. Снова закрепите их шурупами. Сквозь третье отверстие на первом бруске проденьте стержень с резьбой. Заверните на стержне гайку. Проденьте стержень сквозь отверстие во втором бруске. Поворачивайте стержень до тех пор, пока он не пройдет сквозь все отверстия и не дойдет до вала двигателя. Соедините вал двигателя и стержень при помощи шланга и зажимов из проволоки. На втором бруске гайка удерживается при помощи дополнительных гаек и винтов. В завершение, отрежьте брусок дерева для подставки. Привинтите ее шурупами ко второму бруску. Проверьте, установлена ли подставка ровно на поверхности. Регулировать положение подставки на поверхности можно при помощи дополнительных винтов и гаек. Так делается вал для тестовой системы.





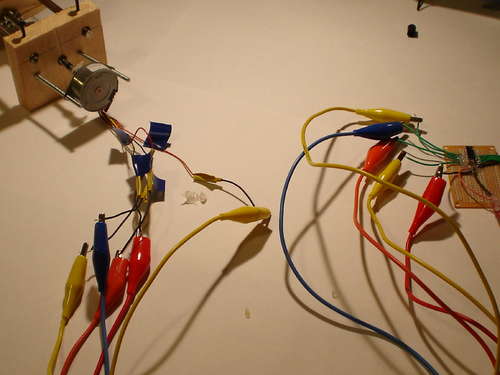
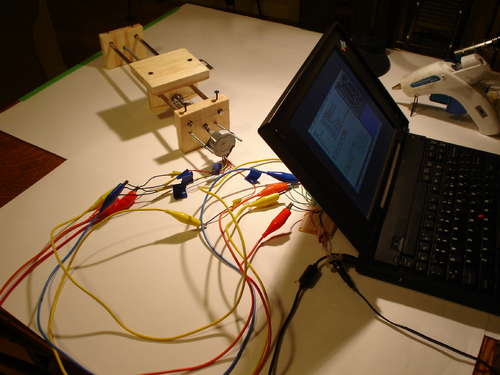
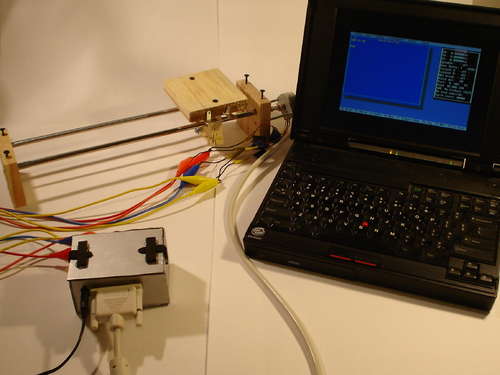
Шаг 8.
Подсоединяем и тестируем двигатель Теперь нужно соединить двигатель с контроллером. Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо. Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади.
Шаг 9.
Изготовление корпуса
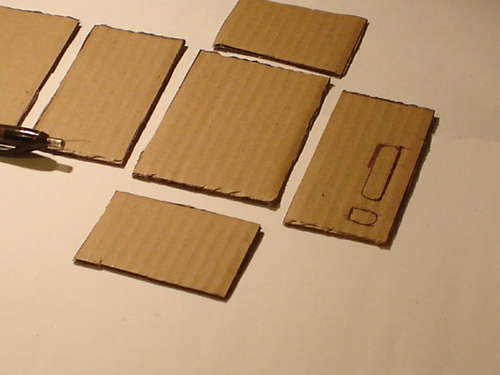
Часть 1
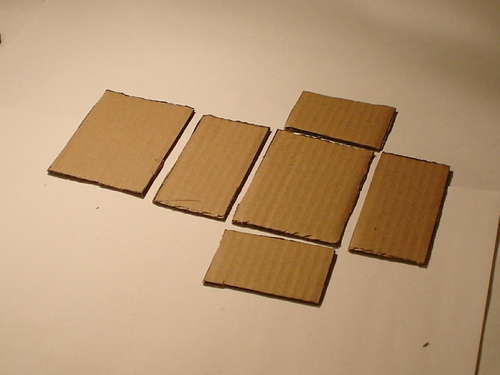
Изготовление корпуса — это завершительный этап. Присоединимся к защитникам природы и сделаем его из вторсырья. Тем более, что контроллер у нас тоже не с магазинных полок. У представленного вашему вниманию образца плата имеет размер 5 на 7,5 см, поэтому корпус будет размером 7,5 на 10 на 5 см, чтобы оставить достаточно места для проводов. Из картонной коробки вырезаем стенки. Вырезаем 2 прямоугольника размером 7,5 на 10 см, еще 2 размером 5 на 10 см и еще 2 размером 7,5 на 5 см (см. рисунки). В них нужно вырезать отверстия для разъемов. Обведите контуры разъема параллельного порта на одной из 5 х 10 стенок. На этой же стенке обведите контуры цилиндрического гнезда для питания постоянного тока. Вырежьте по контурам оба отверстия. То, что вы будете делать дальше, зависит от того, припаивали ли вы к проводам двигателя разъемы. Если да, то закрепите их снаружи второй пока пустой стенки размером 5 х 10. Если нет, проткните в стенке 5 отверстий для проводов. При помощи клеевого пистолета соедините все стенки вместе (кроме верхней, см. рисунки). Корпус можно покрасить.










Шаг 10.
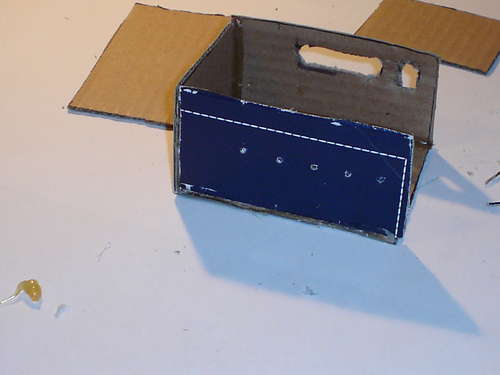
Изготовление корпуса
Часть 2
Теперь нужно приклеить все компоненты внутрь корпуса. Убедитесь, что на разъемы попало достаточно много клея, потому что они будут подвергаться большим нагрузкам. Чтобы коробка оставалась закрытой, нужно сделать защелки. Из пенопласта вырежьте пару ушек. Затем вырежьте пару полос и четыре небольших квадратика. Приклейте по два квадратика к каждой из полос как показано на рисунке. Приклейте ушки по обеим сторонам корпуса. Сверху коробки приклейте полосы. Этим завершается изготовление корпуса.

Шаг 11.
Возможные применения и заключение Этот контроллер можно применять как: — ЧПУ устройство — плоттер — или любую другую вещь, которой нужно точное управление движением. — добавление- Здесь приведены схема и инструкции по изготовлению контроллера с тремя осями. Чтобы настроить программное обеспечение, следуйте вышеуказанным шагам, но в поле «number of axis» введите 3.
Для настройки первой оси делайте все как было сказано выше, для второй оси тоже, но в строках первых четырех фаз введите следующее:
«XXXX1000XXXX
XXXX0100XXXX
XXXX0010XXXX
XXXX0001XXXX»
Для третьей оси в строках первых четырех фаз введите:
«XXXXXXXX1000
XXXXXXXX0100
XXXXXXXX0010
XXXXXXXX0001″
Перевод: Piyavka, по заказу РадиоЛоцман