Провести дефектацию электродвигателя до его разборки.
Разобрать электродвигатель.
Выполнить дефектацию электродвигателя после разборки.
Заполнить дефектировачную ведомость
Содержание работы и порядок ее выполнения
Дефектация электрических машин при ремонте проводится для определения характера и объёма ремонта или возможности списания машины. Все неисправности механической и электрической частей записываются в специальную ведомость, которая служит основой для выдачи нарядов на выполнение ремонтных работ.
Содержание работы и порядок ее выполнения, а также дефектировочной ведомости заносятся в тетрадь.
Требования безопасной работы
Ø для присоединения мегаомметра к измеряемым цепям применять изолированные провода, имеющие на концах изолирующие рукоятки с зажимами;
Ø измерения мегаомметром проводят 2 человека, один из которых вращает ручку мегаомметра, а другой подключает аппарат к измеряемым участкам схемы;
Ø любые переключения схемы проводить после отключения её от сети.
Методика определения неисправностей двигателя, его деталей и узлов
Краткие сведения об устройстве асинхронного короткозамкнутого двигателя.
Электродвигатели служат преобразователями электрической энергии в механическую и составляют основу электропривода большинства механизмов. Наибольшее распространение в сельском хозяйстве имеют асинхронные двигатели с короткозамкнутым ротором различных серий. С 1970 года выпускаются новые двигатели серии 4А, имеющие лучшие технико-экономические показатели по сравнению с двигателями А2/АО2/ и предназначенные для их замены. Серия 4А охватывает диапазон номинальных мощностей от 0,6 до 400 кВт, имеет 17 высот оси вращения от 50 до 355 мм. Предусмотрено 3 исполнения по степени механической защиты (IР44, IР23, IР54).
В серию 4А входят двигатели специализированного исполнения для сельского хозяйства (высота оси вращения 50-180мм), с мощностью до 30 кВт с частотой вращения 3000, 1500, 1000 мин -1 на напряжение 380 В. Двигатели сельскохозяйственного назначения могут длительно работать при пониженном до 90 и 80% напряжении от номинального значения со снижением мощности соответственно на 5 и 15 %. Асинхронный двигатель состоит из неподвижного статора и вращающегося ротора (рисунок1). Станина статора 6, представляющая собой литое изделие из чугуна или алюминиевого сплава в зависимости от исполнения двигателя, лапами или фланцем крепится к фундаменту или к другой конструкции. В станине жестко закреплён сердечник статора 8. Магнитопровод асинхронного двигателя для увеличения передаваемой электромагнитной мощности выполнен из листовой электротехнической стали. В листах, из которых собирается сердечник статора, выштампованы пазы, куда укладывается статорная обмотка 5 из медного изолированного провода. Обмотка изолирована от сердечника электроизоляционным материалом.
На корпусе установлена коробка выводов 18, имеющая внутри зажимы для подключения выводов обмотки и присоединения двигателя к сети. Сверху на корпусе расположен грузовой болт 7 для подъёма двигателя, а сбоку болт 21 для подключения заземления.

Рисунок 1 — Асинхронный электродвигатель серии 4А с короткозамкнутым ротором и со степенью защиты IP44: 1, 3 — наружная и внутренняя крышки подшипников; 2, 16 — подшипники качения; 4 — замыкающее кольцо ротора с вентиляционной лопаткой; 5, 8 — обмотка и сердечник статора; 6 – станина; 7 — рым-болт; 9 — сердечник ротора; 10 — балансировочный груз; 11 – вал; 12, 21 – болты; 13 — подшипниковый щит; 14 – кожух; 15 — наружный вентилятор; 17 — втулка вентилятора; 18 — коробка выводов; 19 — стопорные винты; 20 — скоба.
Второй основной частью магнитной цепи является сердечник ротора 9, собранный из круглых листов электротехнической стали, с выштамповаными пазами для роторной обмотки. Обмотка ротора образуется заливкой алюминия в пазы и соединения залитых в пазы частей в единую короткозамкнутую систему кольцом.
Сердечник ротора напрессован на цельнометаллический вал 11, который при помощи подшипников крепится в подшипниковые щиты 13, отлитые из чугуна или алюминиевого сплава. Рабочий конец вала служит для соединения двигателя с приводным механизмом, на другом конце размещён вентилятор 15 для охлаждения двигателя. Вентилятор закрыт кожухом 14.
Помимо асинхронных короткозамкнутых двигателей выпускаются электродвигатели с фазным ротором. Они используются для привода механизмов с большим моментом при пуске, а также при необходимости регулирования частоты вращения в небольших пределах. В фазном роторе в пазах укладывают трёхфазную обмотку, соединённую обычно в звезду. Свободные концы у такой обмотки подведены к контактным кольцам, на которые накладываются щётки, позволяющие присоединить к вращающемуся ротору реостат, используемый для плавного пуска двигателя и регулирования его частоты вращения.
Принцип действия асинхронного двигателя основан на законе электромагнитной индукции. При подключении двигателя к сети трёхфазного переменного тока в обмотке статора образуется вращающееся магнитное поле, под действием которого в роторе индуктируется ЭДС и протекает ток. Взаимодействие тока ротора с полем статора создаёт вращающий момент, под действием которого ротор приходит во вращение.
Разборка электродвигателя
Перед проведением ремонта электродвигатель отключают от сети и принимают меры по предупреждению’ случайной подачи напряжения. Электродвигатель очищают от пыли и грязи, снимают крышку коробки выводов, отсоединяют кабель питания, а также отсоединяют провод заземления. Разъединяют электродвигатель и рабочую машину, снимают его с фундамента и транспортируют на участок ремонта.
Разборку электродвигателя начинают со съёма шкива, полумуфты или звёздочки с вала. При этом используются ручные винтовые съёмники для электродвигателей малых или средних габаритов или гидравлические съёмники для электродвигателей больших габаритов.
Снимается кожух вентилятора (у электродвигателей закрытого обдуваемого исполнения) и снимается вентилятор.
Отвёртывают болты, которыми прикреплён к станине задний (расположенный со стороны противоположной приводу) и передний подшипниковые щиты. Снимают задний щит лёгкими ударами молотка по надставке из дерева, алюминия или меди. Вынимают ротор из статора, стараясь не повредить лобовых частей обмотки (между ротором и статором рекомендуется проложить лист картона). Выемку ротора машин малой мощности производят вручную, для машин средней и большой мощности используют специальные подъёмные приспособления.
Снимают передний щит с подшипника ротора лёгкими ударами молотка по надставке.
Снимают подшипники качения с вала. Для этой цели используются ручные съёмники или стенд для разборки электрических машин ОР 9174. При его использовании ротор устанавливается в тиски, так чтобы концы вала расположились по возможности симметрично относительно оси поворота стола и закрепляется специальным ключом, входящим в комплект стенда. При этом необходимо обеспечить соосность вала ротора и головки съёмника. Каретка съёмника вручную перемещается до положения, обеспечивающего ввод захватов съёмника за внутренний торец наружного кольца подшипника. Вращением гайки и рукоятки захваты заводятся в зацепление. Включается выключатель гидропривода. Поворотом рукоятки крана управления создаётся рабочий ход гидроцилиндра съёмника. После окончания рабочего хода гидроцилиндра он переключается на обратный ход, разъединяются захваты, и удаляется снятый подшипник. Выключается гидропривод. Стол поворачивается на 180 градусов. В описанном порядке снимается второй подшипник.
Разборка двигателя закончена.
Дата добавления: 2019-02-22 ; просмотров: 774 ; Мы поможем в написании вашей работы!
Лабораторная работа №4 Дефектация и ремонт асинхронных двигателей
Цель работы:
Освоить методику дефектации асинхронного двигателя.
В результате выполнения работы студент должен:
знать– основные повреждения асинхронных двигателей;
уметь – определять основные повреждения асинхронных двигателей и устранять их.
Методические указания:
Дефектацию электрических машин перед ремонтом проводят для определения характера и объема ремонта. Принятую в ремонт машину тщательно осматривают и ставят на ней ремонтный номер, под которым она проходит весь цикл ремонта. Затем проводят испытания, позволяющие определить степень разборки машины для уточнения объема ремонтных работ. Все неисправности механических частей и обмотки записывают в специальную ведомость, которая служит основанием для выдачи нарядов на выполнение ремонтных работ, определения объема и стоимости ремонта. После окончания ремонта по ведомости дефектов уточняют объем послеремонтных испытаний. При дефектации асинхронного электродвигателя в собранном виде выполняют перечисленные ниже операции.
1. Осматривают электродвигатель, руководствуясь следующими соображениями:
a. станина и подшипниковые щиты считаются негодными, если они имеют трещины в посадочных местах. Трещины можно заваривать только в том случае, если это не вызовет деформации посадочных мест;
b. клеммная коробка должна быть прочно прикреплена к станине, клеммные болты хорошо закреплены и замаркированы.
2. Проверяют целостность обмотки, пользуясь контрольной лампой или мегомметром.
3. Измеряют сопротивление изоляции между фазами и относительно корпуса. Значение сопротивления изоляции должно быть не менее 0,5 МОм.
4. Если это возможно, машину включают на холостом ходу и проверяют работу подшипников (шум, нагрев), вентилятора, измеряют токи по фазам. Асимметрия фазных токов не должна превышать ±5%.
При дефектации разобранной машины выполняют следующие операции:
1. Проверяют состояние отдельных узлов и деталей. Крепежные детали заменяют, если они искривлены, имеют испорченную резьбу, головки болтов смяты и т.д. Подшипниковые щиты рассчитаны на плотную посадку в станину; посадка подшипника качения в щит плотная подшипниковая; посадка крышки подшипника в щит ходовая или широкоходовая; зазор между крышкой подшипника и валом должен быть 0,3—0,7мм. Посадка подшипника на вал напряженная подшипниковая.
2. Измеряют воздушный зазор между статором и ротором. При этом ротор укладывают в статор и при помощи щупа измеряют зазор между поверхностью ротора и расточкой статора в верхней части с одной и с другой стороны машины. Воздушный зазор равен половине измеренного расстояния. Измерение повторяют при повороте ротора на 180°. Полученный результат сравнивают с допустимым значением.
3. Подшипники качения заменяют, если обнаружены ощутимый люфт, нагар, шелушение беговых дорожек, трещины в обоймах.
Допустимые значения радиальных зазоров в подшипниках качения указаны в таблице 4.1.
| Диаметр вала, мм | Радиальные зазоры (мм) в шариковых и роликовых подшипниках |
| 20—30 | од |
| 35—50 | 0,15 |
| 50—80 | 0,2 |
| 80—120 | 0,3 |
Перед проверкой подшипники тщательно промывают. Номер подшипника, вышедшего из строя, записывают в ведомость дефектов.
4. Подшипники скольжения считают годными, если нет трещин во втулке и вкладыше. Зазоры между подшипником скольжения и валом не должны превышать более чем на 25% зазоров, указанных в таблице 4.2.
| Диаметр вала, мм | Зазор (мм) при частоте вращения, об/мин | |
| менее 1000 | более 1000 | |
| 18—30 | 0,04—0 09 | 0 06 0 12 |
| 31—50 | 0,05—0,12 | 0,07—0,14 |
| 51—80 | 0,06—0,13 | 0,09—0,17 |
| 81—120 | 0,08—0,16 | 0,12—0,21 |
5. Осматривают вал, обращая внимание на состояние посадочных поверхностей, шпоночной канавки, отсутствие искривлений. Вал считается годным, если в нем нет трещин, шейки его имеют строго цилиндрическую поверхность, конусность и овальность шеек подшипников скольжения не превышают 0,05мм. На посадочных поверхностях вала под подшипником качения допускаются небольшие вмятины общей площадью не более 4%, а на посадочной поверхности под шкив или муфту— не более 10%. Прогиб допускается до 0,1мм на метр его длины, но не более 0,2 мм по всей длине вала. Трещины вала заваривают, если глубина поперечных трещин превышает 10—15% диаметра вала, а продольных—10% общей длины вала.
6. Проверяют плотность посадки вентилятора на вал и его состояние. Вентилятор считается годным, если лопасти его прочно закреплены и он плотно посажен на валу. Биение вентилятора в осевом и радиальном на правлениях не должно превышать 0,3% от наружного диаметра вентилятора.
7. Осматривают пакет активной стали статора. Пакет стали не должен иметь смещения, вмятин, ослабления, прессовки листов железа, распушившихся зубцов прогара.
8. Короткозамкнутый ротор должен быть плотно посажен на вал и не иметь трещин и разрывов в стержнях и коротко замыкающих кольцах.
Для проверки можно использовать метод электромагнита (с амперметром, со стальной пластиной или железными опилками). Ротор следует уложить на электромагнит (или наоборот), к обмотке которого подведено переменное напряжение, как это показано на рисунке 4.1.
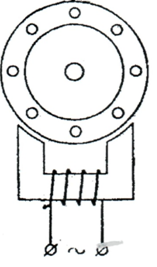
Рисунок 4.1. Схема определения обрыва стержней ротора
при помощи электромагнита
При проверке целостности стержней способом электромагнита со стальной пластиной ее следует накладывать на каждый паз. Если пластина не притягивается к пазу, значит, в этом пазу обрыв стержня.
9. Износ колец фазового ротора не должен превышать 50% первоначальной толщины. Наименьшая допустимая толщина колец в радиальном направлении не должна быть менее 5 мм. Замыкание контактных колец на корпус или между собой можно определить контрольной лампой или мегомметром.
10. Определяют дефекты обмотки статора. Замыкание обмотки статора на корпус и между фазами можно определить при помощи контрольной лампы или мегомметра.
11. Не разрывая соединений между катушками, но, очистив их от изоляции, можно определить места повреждения методом падения напряжения. На поврежденную фазу при этом нужно подать напряжение 6—9В постоянного тока. Милливольтметром измерить падения напряжения между каждым концом катушечной группы и корпусом, а также между катушечными группами разных фаз. Падение напряжения в месте повреждения будет минимальным.
12.Плохой контакт в схеме обмотки статора можно определить измерением сопротивления отдельных фаз постоянному току методом вольтметра—амперметра. Измеренные сопротивления должны отличаться друг от друга не более чем на 5%.
13.Витковое замыкание в обмотке статора можно определить методом электромагнита. Стальная пластинка будет притягиваться к зубцам под пазом, в котором лежит сторона неисправной катушки. Пластина будет также притягиваться над пазом, лежащим на расстоянии шага от паза с неисправной катушкой (рисунок 4.2).
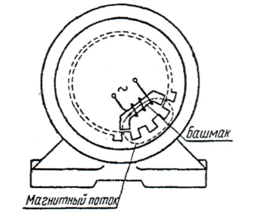
Рисунок 4.2. Схема определения викового замыкания обмотки статора при помощи электромагнита
Витковые замыкания в обмотке статора можно также определять при помощи специальных приборов типа ЕЛ и ПДО.
Дефекацию обмоток фазовых роторов проводят аналогично.
1. Для проведения ремонта обмоток необходимо записать обмоточные данные: тип обмотки, число пазов статора N, число полюсов 2р (скорость, частота вращения), число катушек в катушечной группе (число пазов на полюс и фазу q), шаг обмотки у, число витков в катушке, диаметр и марку обмоточного провода, размер вылета лобовых частей, конструкцию пазовой и междуфазной изоляции. Нарисовать схему обмотки.
2. Если есть необходимость изготовить какую-либо деталь вновь, нужно вычертить эскиз по имеющимся образцам и приложить его к ведомости дефектов.
Ход работы:
1. Осмотреть электродвигатель и записать его паспортные данные.
2. Провести дефектацию электродвигателя до разборки.
3. Разобрать электродвигатель.
4. Провести дефектацию двигателя после разборки.
5. Записать обмоточные данные и вычертить схему обмотки.
6. Вычертить эскизы недостающих или неисправных деталей.
7. Оформить отчет.
Контрольные вопросы:
1 .Каково назначение ведомости дефектов?
2.Какие неисправности выявляются в двигателе до разборки и после нее?
З.Как провести дефекацию короткозамкнутого ротора?
4.Как можно определить витковое замыкание в обмотке статора?
5.Каково назначение дополнительной пропитки и сушки обмоток, не подлежащих капитальному ремонту?
Практическая работа №1 Планирование ремонта электромашин, определение трудоемкости и численности рабочих
Цель работы:
Научиться производить расчет по планированию ремонтов электрических машин.
В результате выполнения работы студент должен:
знать-методику расчета межремонтных циклов;
уметь – определять продолжительность ремонтных циклов электрических машин и рассчитывать трудоемкость ремонта.
Ход работы:
1. Определить продолжительность ремонтного цикла и межремонтного периода для электромашин цеха (по заданию преподавателя).
2. Определить трудоемкость капитального ремонта электрической машины.
Методические указания.
При планировании структуры ремонтного цикла, под которой понимаются виды и последовательность чередования плановых ремонтов, исходят из длительности ремонтного цикла. Период времени между двумя плановыми капитальными ремонтами Тпл определяется продолжительностью ремонтного цикла Тта6л. В свою очередь Тта6л определяется при нормальных условиях эксплуатации при двухсменной работе электрических машин. Значения Тта6лдля ряда характерных производств приведены в таблице 1.1.
| Условия работы электрических машин | Ттабл., лет | Tтабл., мес. |
| Сухие помещения (Кс=0,25) | ||
| Горячие, гальванические и химические цеха (Кс=0,45) | ||
| Загрязненные цеха – деревообработки, сухой шлифовки и т.п. (Кс= 0,25) | ||
| Длительные циклы непрерывной работы с большой нагрузкой – приводы насосов, компрессоров и т.д. (Кс=0,75) |
В промежутке времени между двумя капитальными ремонтами проводят несколько текущих. Период времени между двумя плановыми текущими ремонтами tпл определяется продолжительностью межремонтного периода tтабл, значения которого также приведены в таблице 1.1.
Плановая продолжительность работы между двумя капитальными и текущими ремонтами определяется по следующим формулам:
 (1.1)
(1.1)
tпл=tтабл  (1.2)
(1.2)
где  =0,75 для коллекторных машин и 1,0 для остальных машин;
=0,75 для коллекторных машин и 1,0 для остальных машин;
 — коэффициент, учитывающий сменность работы машины, он определяется числом смен Ксм;
— коэффициент, учитывающий сменность работы машины, он определяется числом смен Ксм;
 — коэффициент использования в зависимости от отношения коэффициента фактического спроса к нормируемому Кф.с./Кс;
— коэффициент использования в зависимости от отношения коэффициента фактического спроса к нормируемому Кф.с./Кс;
 =
=  =1,0 для электрических машин, отнесенных к вспомогательному оборудованию, для машин основного оборудования =0,85 и =0,7;
=1,0 для электрических машин, отнесенных к вспомогательному оборудованию, для машин основного оборудования =0,85 и =0,7;
 =1,0 для электрических машин, установленных на стационарных установках, а для машин передвижных электрических установок =0,6.
=1,0 для электрических машин, установленных на стационарных установках, а для машин передвижных электрических установок =0,6.
Ниже приведены значения коэффициентов и :
| Кф.с./Кс | 0,5 | 0,75 | 1,0 | 1,1 | 1,2 | 1,3 |
| | 1,3 | 1,1 | 1,0 | 0,9 | 0,8 | 0,7 |
| Ксм | 1,25 | 1,5 | 1,75 | 2,5 | ||
| | 1,6 | 1,35 | 1,13 | 0,8 | 0,67 |
Под коэффициентом спроса Кс понимается отношение максимальной нагрузки предприятия (цеха, отдельного производства) Pmax к суммарной установленной на нем мощности электроприемников Ру(электродвигатели, электротехнологические процессы, освещение и др.). Под Pmaxпонимается получасовой максимум нагрузки предприятия, заложенный в его технический проект и заявляемый предприятием при составлении договора с энергоснабжающей организацией. По значению Pmaxопределяется, в частности, необходимая суммарная мощность связывающих его с электрической системой трансформаторов. Таким образом
Реальная нагрузка предприятия может отличаться от расчетной, также как и суммарная мощность установленных на нем приемников электрической энергии. Поэтому наряду с коэффициентом Ксвводится коэффициент фактического спроса Кф,с, который определяется опытным путем по фактическому среднечасовому максимуму нагрузки Pфmax и фактической установленной мощности электроприемников Рфу:
Коэффициент фактического спроса может существенно отличаться от первоначально принятого. Чем больше Кф.с, тем больше средняя нагрузка электрических машин, установленных на предприятии.
По указанной методике для каждой электрической машины, установленной на предприятии, можно рассчитать промежуток времени между капитальными и текущими ремонтами и составить календарный график проведения этих ремонтов, согласовав его с графиком ремонтов основного технологического оборудования. На базе графиков ремонта по отдельным участкам и цехам составляется сводный график ремонта электрических машин по предприятию в целом.
Определить продолжительность ремонтного цикла и межремонтного периода для асинхронного рольгангового двигателя с короткозамкнутым ротором, который установлен на прокатном стане металлургического завода, имеет трехсменный график работы (непрерывное производство) и коэффициент фактического спроса, равный 0,6.
Для горячих цехов Ттабл=4 года, tтабл= 6 месяцев при Кс=0,45. Далее определяем значение соответствующих коэффициентов:  =1 (у двигателя отсутствует коллектор); =0,67 при Ксм=3;
=1 (у двигателя отсутствует коллектор); =0,67 при Ксм=3;
=0,7 (для Кф.с./Кс=0,6/0,45=1,33); =0,85; =0,7 (двигатель относится к основному оборудованию); =1 (установка стационарная). Тогда в соответствии с формулами (1.1) и (1.2) рассчитываем время между двумя капитальными Тпл и текущими tпл ремонтами:
Срок 2 месяца соответствует 0,167 года, поэтому между двумя капитальными ремонтами двигатель должен пройти 8 текущих (Тпл/ tпл=1,6/0,167=9, но поскольку очередной капитальный ремонт совпадает с текущим, то последний текущий ремонт заменяется на очередной капитальный).
Контрольные вопросы:
1. Что называют продолжительностью ремонтного цикла?
2. Что понимают под коэффициентом спроса?
3. Что понимают под коэффициентом фактического спроса?
4. На какие группы делятся электромашины находящиеся в эксплуатации предприятия?
5. Расшифруйте понятие «условная единица ремонта»