Электрические машины переменного тока
Электрические машины служат для превращения механической энергии в электрическую (генераторы переменного и постоянного тока) и для обратного превращения (электродвигатели).
Во всех указанных случаях используются в сущности три основных открытия в области электромагнетизма: явление механического взаимодействия токов, открытое Ампером в 1821 г., явление электромагнитной индукции, открытое Фарадеем в 1831 г., и теоретическое обобщение этих явлений, сделанное Ленцем (1834 г.) в его известном законе о направлении индукционного тока (по существу закон Ленца предвосхитил закон сохранения энергии для электромагнитных процессов).

Для преобразования механической энергии в электрическую или обратно необходимо создать относительное движение проводящего контура с током и магнитного поля (магнита или тока).
В электрических машинах, рассчитанных на длительную работу, используется вращательное движение подвижной части машины (ротор машины переменного тока), расположенной внутри неподвижной части (статора). Обмотка машины, служащая для создания магнитного поля, называется индуктором, а обмотка, обтекаемая рабочим током, называется якорем. Оба последних термина употребляются и для машин постоянного тока.
Для увеличения магнитной индукции обмотки машин размещаются на ферромагнитных телах (сталь, чугун).
Все электрические машины обладают свойством обратимости, т. е. могут использоваться как в качестве генераторов электрической энергии, так и в качестве электродвигателей.

В асинхронных двигателях используется одно из проявлений электромагнитной индукции. В курсах физики оно демонстрируется следующим образом:
Под медным диском, способным вращаться вокруг вертикальной оси, проходящей через его центр, помещается вертикальный подковообразный магнит, приводимый во вращение вокруг той же оси (механическое взаимодействие диска и магнита исключено). При этом диск приходит во вращение в ту же сторону, что и магнит, но с меньшей скоростью. Если увеличить механическую нагрузку на диск (например, увеличив трение оси о подпятник), то скорость его вращения уменьшается.
Физический смысл этого явления легко объясняется теорией электромагнитной индукции: при вращении магнита создается вращающееся магнитное поле, наводящее в диске вихревые токи величина последних зависит при прочих равных условиях от относительной скорости поля и диска.
Согласно закону Ленца диск должен прийти во вращение в направлении поля. При отсутствии трения диск должен приобрести угловую скорость, равную скорости магнита, тогда ЭДС индукции исчезнет. В реальных условиях трение неизбежно присутствует, и диск приобретает меньшую скорость. Ее величина зависит от механического тормозящего момента, испытываемого диском.
Несовпадение скорости вращения диска (ротора) со скоростью вращения магнитного поля отражено в названии двигателей.
Принцип действия асинхронных двигателей:
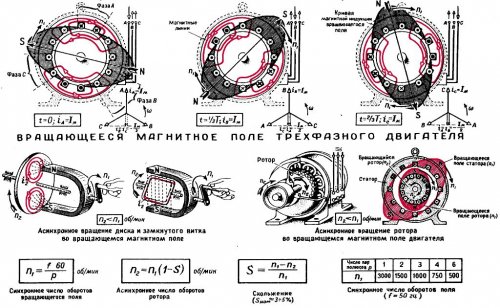
В технических асинхронных двигателях (чаще всего трехфазных) вращающееся магнитное поле создается многофазным током, обтекающим обмотку неподвижного статора. При частоте трехфазного тока f и числе катушек статора 3 р вращающееся поле делает n = f/p об/сек.

В полости статора располагается способный вращаться ротор. С его валом можно соединить механизм, приводимый во вращение. В простейших «короткозамкнутых» двигателях ротор состоит из системы продольных металлических стержней, помещаемых в пазы стального цилиндрического тела. Провода соединены накоротко двумя кольцами. Для увеличения вращательного момента радиус ротора делается достаточно большим.

В других конструкциях двигателей (обычно — это двигатели большой мощности) проводники ротора образуют разомкнутую трехфазную обмотку. Концы катушек замкнуты накоротко в самом роторе, а начала выведены к трем контактным кольцам, насаженным на вал ротора и изолированным от него.
К этим кольцам при помощи скользящих контактов (щеток) присоединен трехфазный реостат, который служит для пуска двигателя в ход. После того как двигатель раскрутится, реостат полностью выводят, и ротор превращается в короткозамкнутый (смотрите — Асинхронные двигатели с фазным ротором).

На теле статора имеется доска для зажимов. К ним выводятся обмотки статора. Они могут быть включены звездой, либо треугольником, в зависимости от напряжения сети: в первом случае линейное напряжение может быть в 1,73 раз больше, чем во втором.
Величина характеризующая относительное запаздывание ротора по сравнению с полем статора у асинхронного двигателя, называется скольжением. Она изменяется от 100% (в момент пуска двигателя) до нуля (идеальный случай движения ротора без потерь).
Перемена направления вращения асинхронного двигателя достигается взаимным переключением каких-либо двух линейных проводов электрической сети, питающей двигатель.

Короткозамкнутые двигатели широко применяются в промышленности. Достоинствами асинхронных двигателей являются простота конструкции и отсутствие скользящих контактов.
Основным недостатком таких двигателей до последнего времени считалась трудность регулировки числа оборотов, т.к. если для этого изменять напряжение цепи статора, то резко меняется вращающий момент, изменять же частоту питающего тока было технически затруднительно. В настоящее время для регулирования частоты питающего тока для изменения частоты вращения двигатели нашли широкое распространение современные микропроцессорные устройства — частотные преобразователи.
Генераторы переменного тока
Генераторы переменного тока строятся на значительные мощности и высокие напряжения. Как и асинхронные машины, они имеют две обмотки. Обычно обмотка якоря располагается в теле статора. Индукторы, создающие первичный магнитный поток, монтируются на роторе и питаются от возбудителя — небольшого генератора постоянного тока, смонтированного на валу ротора. В мощных машинах возбуждение иногда создается выпрямленным переменным напряжением.
Благодаря неподвижности обмотки якоря отпадают технические затруднения, связанные с использованием скользящих контактов при больших мощностях.
На рисунке ниже схематически изображен однофазный генератор. Его ротор имеет восемь полюсов. На них намотаны катушки (не показанные на рисунке), питаемые от постороннего источника постоянным током, подводимым к контактным кольцам, укрепленным на валу ротора. Полюсные катушки намотаны таким образом, что знаки полюсов, обращенных к статору, чередуются. Число полюсов обязательно четное.
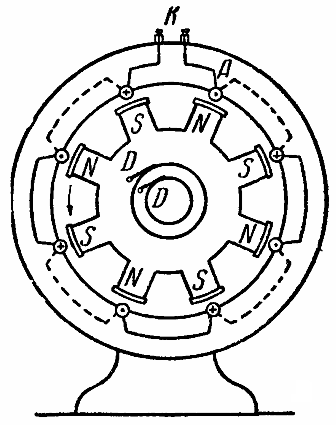
В теле статора размещена обмотка якоря. Ее длинные рабочие «активные» проводники, перпендикулярные к плоскости чертежа, показаны на рисунке кружками, они пересекаются линиями магнитной индукции при вращении ротора.
В кружках указано мгновенное распределение направлений индуцированных электрических полей. Соединительные провода, идущие по передней стороне статора, показаны сплошными линиями, а по задней стороне — пунктиром. Зажимы К служат для присоединения внешней цепи к обмотке статора. Направление вращения ротора указано стрелкой.
Если мысленно разрезать машину по радиусу, проходящему между зажимами К, и развернуть на плоскость, то взаимное расположение обмотки статора и полюсов ротора (сбоку и в плане) изобразится схематическим рисунком:
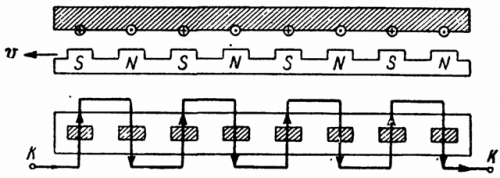
Рассматривая рисунок, убеждаемся, что все активные проводники (проходящие над полюсами индуктора) соединены друг с другом последовательно, причем индуцируемые в них ЭДС суммируются. Фазы всех ЭДС, очевидно, получаются одинаковыми. За время одного полного оборота ротора в каждом из проводников (и, следовательно, во внешней цепи) получится четыре полных периода изменения тока.
Если электрическая машина имеет p пар полюсов и ротор вращается, совершая n оборотов в секунду, то частота получаемого от машины переменного тока равна f = pn гц.
Так как частота ЭДС в сети должна быть неизменна, то скорость вращения роторов должна быть постоянна. Для получения ЭДС технической частоты (50 гц) можно использовать сравнительно медленное вращение, если число полюсов ротора достаточно велико.
Для получения трехфазного тока в теле статора располагают три отдельные обмотки. Каждая из них смещена относительно двух других на одну треть дугового расстояния между соседними (разноименными) полюсами индукторов.
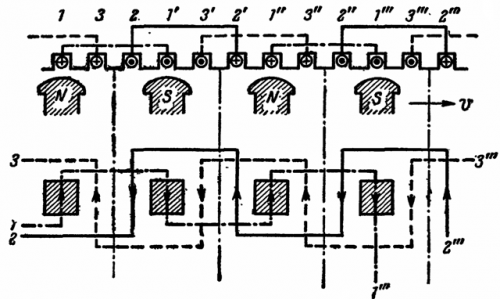
Легко убедиться, что при вращении индукторов в обмотках индуцируются ЭДС, сдвинутые по фазе (во времени) на 120°. Концы обмоток выводятся из машины и могут соединяться звездой или треугольником.
В генераторе относительная скорость поля и провода определяется диаметром ротора, числом оборотов ротора в секунду и числом пар полюсов.

Если генератор приводится во вращение током воды (гидрогенератор), то обычно он делается тихоходным. Для получения нужной частоты тока приходится увеличивать число полюсов, что в свою очередь требует увеличения диаметра ротора.
По ряду технических соображений мощные гидрогенераторы имеют обычно вертикальный вал и располагаются над гидротурбиной, приводящей их во вращение.

Генераторы, движимые паровыми турбинами — турбогенераторы, обычно быстроходны. Для уменьшения механических усилий они имеют малые диаметры и соответственно небольшое число полюсов. Ряд технических соображений заставляет делать турбогенераторы с горизонтальным валом.
Если генератор приводится во вращение двигателем внутреннего сгорания, то его называют дизель-генератором, так как в качестве двигателей обычно применяют дизели, потребляющие более дешевое топливо.

Обратимость генераторов, синхронные двигатели
Если к обмотке статора генератора приключить переменное напряжение от внешнего источника, то возникнет взаимодействие полюсов индуктора с магнитным полем тока, создавшегося в статоре, причем на все полюсы будут действовать вращающие моменты одного и того же направления.
Если ротор вращается с такой скоростью, что как раз через половину периода переменного тока под рассматриваемый проводник обмотки статора подойдет следующий полюс индуктора (противоположный по знаку первому полюсу), то знак силы взаимодействия между ним и током, изменившим свое направление, останется прежним.
При этих условиях ротор, находясь под непрерывным воздействием вращающего момента, будет продолжать свое движение и сможет приводить в действие какой-либо механизм. Преодоление сопротивлений движению ротора будет происходить за счет энергии, потребляемой из сети, и генератор превратится в электродвигатель.

Следует отметить, однако, что непрерывное движение возможно лишь при строго определенной скорости вращения, так как при отклонении от нее на каждый из полюсов ротора, перемещающийся между двумя проводниками статора, часть времени будет действовать ускоряющий вращающий момент, часть же времени — тормозящий.
Таким образом, скорость вращения двигателя должна быть строго определенной,— время, в течение которого полюс заменяется следующим, должно совпадать с полупериодом тока, поэтому подобные двигатели и называются синхронными.
Если переменное напряжение подается в обмотку статора при неподвижном роторе, то, хотя все полюсы ротора в течение первого полупериода тока и испытывают действие вращающих моментов одного и тою же знака, все же вследствие инерции ротор не успеет сдвинуться с места. В следующий полупериод знак вращающих моментов для всех полюсов ротора изменится на обратный.
В результате ротор будет вибрировать, но вращаться не сможет. Поэтому синхронный двигатель необходимо сначала раскрутить, т. е. довести до нормального числа оборотов, и лишь после этого включать ток в обмотку статора.
Раскручивание синхронных двигателей производится механическими способами (при малых мощностях) и специальными электрическими устройствами (при больших мощностях). 
При небольших изменениях нагрузки режим двигателя автоматически изменяется, приспосабливаясь к новой нагрузке. Так, при увеличении нагрузки на вал двигателя ротор мгновенно затормаживается. Благодаря этому меняется фазовый сдвиг между напряжением сети и противодействующей ЭДС индукции, наводимой индуктором в обмотке статора.
Кроме того, реакция якоря создает размагничивание индукторов, поэтому ток в статоре растет, индукторы испытывают увеличенный вращающий момент и двигатель, вновь начинает вращаться синхронно, преодолевая увеличенную нагрузку. Аналогичный процесс происходит при уменьшении нагрузки.
При резких колебаниях нагрузки эта приспособляемость двигателя может оказаться недостаточной, скорость его изменится значительно, он «выпадет из синхронизма» и в конце концов остановится, при этом исчезает ЭДС индукции, наводившаяся в статоре, и ток в нем резко увеличивается. Поэтому следует избегать резких колебаний нагрузки. Для остановки двигателя, очевидно, нужно сначала выключить цепь статора, а потом уже выключать индукторы, при пуске двигателя следует придерживаться обратного порядка операций.
Синхронные двигатели наиболее часто применяются для привода механизмов, которые работают с постоянной скоростью. Достоинства и недостатки синхронных двигателей, а также способы их пуска рассмотрены здесь: Синхронные двигатели и их применение
МАШИНЫ ПЕРЕМЕННОГО ТОКА




![]()
![]()
6.1 Общее устройство машин переменного тока
Машинами переменного тока (МПрТ) называются устройства, преобразующие электрическую энергию переменного тока в механическую и наоборот. Как и машины постоянного тока (МПТ), они обладают принципом обратимости и также имеют подвижную и неподвижную части. Подвижная часть называется р о т о р о м, а неподвижная с т а т о р о м.
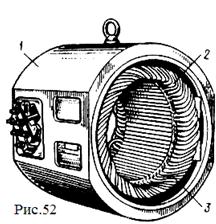
В отличие от МПТ, в машинах переменного тока наиболее важным узлом является неподвижная часть, т.е. статор (рис.52). Это объясняется тем, что именно в обмотке статора наводится ЭДС. В генераторе она создает напряжение на клеммах машины, а в двигателе определяет величину поступающего тока и и его механические характеристики.
Так же как в якоре МПТ, она размещается в пазах статора. Статор состоит из корпуса (1), сердечника (2) и обмотки (3). Обмотка машин переменного тока является 3-х фазной и это обстоятельство является главной особенностью машин переменного тока. Дело в том, что за счет сдвига фаз токов друг относительно друга на 120 0 , и пространственного разнесения катушек в полости статора также на 120 0 , удается создать вращающееся магнитное поле. Этот факт иллюстрируется на рис.53.
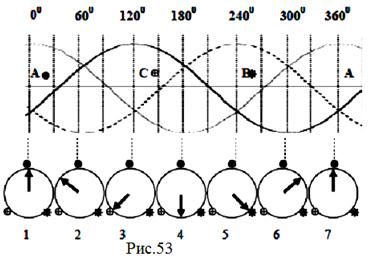
На нем представлены колебания 3-х токов в катушках А, В, С , пространственное положение которых в статоре отмечено тремя метками на нижних круговых диаграммах. Указанные катушки изображены на окружностях в порядке следования по часовой стрелке вдоль каждой из семи окружностей, символизирующих внутреннюю полость статора. Черная стрелка в каждой окружности изображает суммарное магнитное поле созданное этими катушками. Так, при 0 0 , суммарное магнитное поле направлено вверх , к катушке А (ток в ней положителен). При 60 0 , т.е. спустя некоторое время, наибольший ток — отрицательного знака — возникает в катушке В и суммарное магнитное поле становится направленным от катушки В, которая находится в правой нижней части окружности статора). При 120 0 , наибольшее значение — положительное — приобретает ток в катушке С и суммарное магнитное поле оказывается направленным к катушке С, находящейся в нижней левой части окружности-статора и т.д. Важным моментом в рассматриваемом изменении ориентации магнитного поля является то, что оно остается п о с т о я н н ы м п о м о д у л ю . То есть колебания 3-х токов в обмотках статора приводят к равномерному вращению постоянного по величине магнитного поля в полости статора.
Получающееся магнитное поле (N-S) совершает один полный оборот за один период колебаний. Как известно, промышленный 3-х фазный ток имеет частоту 50 Гц, — следовательно скорость вращения магнитного поля в полости статора МПрТ составляет 50х60 = 3000 об/мин. В силу обратимости машин переменного тока справеливо и обратное утверждение: для создания трехфазного тока с частотой переменного тока 50 Гц, в машине с 3-мя катушками, скорость вращения магнитного поля (N-S) – т.е. ротора c одной парой полюсов — должна составлять 3000 об/мин. Это значение скорости является максимальным для серийных машин переменного тока, однако не единственно возможным.
Действительно, если вместо 3-х катушек в полости статора разместить 6 катушек в порядке чередования «А-В-С-А-В-С», то за один период колебания тока в каждой фазе вектор индукции суммарного магнитного поля повернется только на 180 0 , а скорость вращения поля снизится до 1500 об/мин. При этом ротор такой машины должен иметь 2 пары полюсов «N-S-N-S», так как по истечению полного периода колебаний тока, и повороте ротора на 180 0 , ориентация полюсов должна приобрести первоначальную конфигурацию. Это возможно только, если одноименные полюса ротора также находятся под углом 180 0 , а разноименные — под углом 90 0 .
В результате при 3-х кратном увеличении числа катушек, можно получить все меньшие скорости вращения:
| Число катушек |
| Скор. вращ.(об/мин) |
| Чсло полюсов |
Такую зависимость используют для создания двигателей и генераторов с пониженными скоростями вращения. В частности, на больших электростанциях (АЭС, ГЭС) используются очень мощные и массивные машины переменного тока. Так, масса ротора генератора Саяно-Шушенской ГЭС достигает 900 тонн, а диаметр –свыше 10 метров (10,3 м). Такой ротор ни при каких условиях не может вращаться со скоростью 3000 об/мин. — его внешние края должны были бы иметь скорость в несколько раз большую скорости сверхзвукового истребителя. Чтобы сделать скорость вращения ротора приемлемой для такого массивного устройства — например 50 об/мин для выработки тока частотой 50 Гц — на статоре генератора необходимо разместить n = 3*(3000/50) = 180 катушек, а ротор должен иметь р = 180/3 = 60 пар полюсов. Так, ротор генератора Саяно-Шушенской ГЭС имеет 42 полюса и скорость вращения 3000/21= 142,8 об/мин.

Несмотря на большое количество катушек, у статора любой МПрТ всего 6 выводных клемм. Это значит, что все катушки объединяются в 3 однофазных группы, а в каждой группе (фазе) они соединяются либо параллельно либо последовательно. Стороны катушек укладываются в пазы, а расстояния между сторонами выбирается таким образом, чтобы они оказались под соседними противоположными полюсами ротора. Это приводит к тому что ЭДС, наводимые на противоположных сторонах каждой катушки складываются друг с другом. Реальная технология создания обмоток статоров машин переменного тока достаточно сложна и разнообразна. Поэтому в рамках отведенного программой количества учебных часов, мы больше не будем на этом останавливаться.
Что касается роторов МПрТ, то их конструкция задается типом машины переменного тока, который, в свою очередь, определяется характером поведения ротора по отношению к вращающемуся магнитному полю статора. А именно, существует два типа машин: а) с и н х р о н н ы е машины; б) а с и н х р о н н ые машины.
В синхронных машинах ротор имеет такую же скорость вращения, как и магнитное поле (отсюда и их название). В асинхронных машинах скорость вращения ротора не совпадает со скоростью вращения магнитного поля. Если она меньше скорости вращения поля, то машина работает как двигатель, если выше — как генератор.
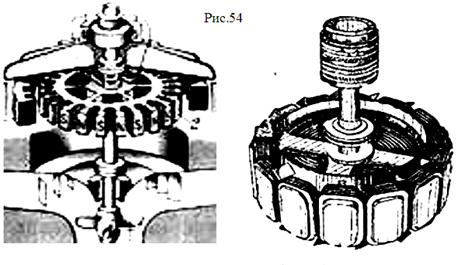
Синхронные машины используются на практике и как генераторы и как двигатели. В частности, все промышленные генераторы электроэнергии на ГЭС, АЭС, ТЭЦ являются синхронными. Асинхронные машины , в основном, используются как двигатели и получили чрезвычайно широкое распространение благодаря простоте своей конструкции. Именно в силу последнего обстоятельства асинхронные двигатели будут рассмотрены более подробно. На нижних рисунках представлены роторы синхронных генераторов ( рис.54) и асинхронных двигателей (рис.56).
6.2 Асинхронные двигатели
Асинхронные двигатели (АД, рис.55) получили широкое распространение в различных отраслях промышленности и бытовых приборах благодаря простоте конструкции. Они широко применяются в приводах металлообрабатывающих, деревообрабатывающих станков, кузнечно-прессовых, ткацких, швейных, грузоподъемных, землеройных машин, вентиляторов, насосов, компрессоров, центрифуг, в ручном электроинструменте.
Асинхронные двигатели выпускаются в двух исполнениях: а) с короткозамкнутым ротором (КР); б) с фазным ротором (ФР). Именно первый тип двигателей получил наибольшее распространение. Двигатели с фазным ротором используются реже вследствие относительной сложности и дороговизны конструкции. Однако они обладают лучшими пусковыми и регулировочными характеристиками и их применяют для привода конвейеров, подъемников, крановых конструкций, различных промышленных мельниц (угольных, цементных и т. д.), вентиляционных систем, а также технических средств, рассчитанным на длительное время непрерывной работы. Ниже рассматривается принцип работы АД с короткозамкнутым ротором, который, в целом сохраняется и в машинах с фазным ротором.
Корпус АД с КР отливают из алюминиевого сплава или из чугуна, либо делают сварным. Обычно поверхность корпуса имеет ряд продольных ребер ( рис.55) увеличивающих охлаждение двигателя. В отличие от синхронных машин, роторы которых имеют собственные магнитные полюса (рис.54), роторы асинхронных двигателей их не имеют (рис.56). Это объясняется тем, что магнитное поле роторов асинхронных двигателей является не собственным, а н а в е д е н н ы м. Основным узлом КР является система из медных или алюминиевых стержней , стянутых между собой торцевыми кольцами и образующих конструкцию типа «беличье колесо» (рис.56, «в»). Эта конструкция образует о б м о т к у р о т о р а, которая имеет тот же смысл, что и вторичная обмотка трансформатора. Обмотка заключается в ферромагнитный сердечник — тело ротора (рис.56, «а», «б»). Сердечник набирается из пластин электротехнической стали и выполняет функцию участка магнитопровода — остальной магнитопровод включает в себя и сердечник статора. В результате вся машина состоит из магнитопровода и двух его обмоток — обмотки статора и обмотки ротора. Это означает, что двигатель, с достаточной степенью корректности можно рассматривать как разновидность трансформатора.
Последнее обстоятельство проявляется в использовании конструкции асинхронного двигателя (в варианте с фазным ротором) в качестве трансформатора, который называется и н д у к ц и о н н ы м р е г у л я т о р о м напряжения. Такой трансформатор обеспечивает плавное изменение напряжения в обмотке ротора при плавном его повороте относительно неподвижной обмотки статора на заданный угол — при этом сам ротор не вращается.
Асинхронный двигатель с КР работает следующим образом:
1) при подаче 3-х фазного напряжения в обмотку статора, в его катушках появляется ток, который порождает вращающееся магнитное поле (см.выше);
2) магнитное поле, пересекая «беличье колесо» обмотки ротора, наводит в ней по закону электромагнитной индукции вихревую электрическую ЭДС, которая, в свою очередь, наводит в его стержнях ток и магнитное поле.
3) магнитное поле ротора взаимодействуя с бегущим магнитным полем статора, создает на роторе вращающий момент и увлекает его за вращающимся полем статора.
При любом положении и скорости ротора, его магнитное поле всегда «бежит» за магнитным полем статора с такой же скоростью. Это означает, что полюса ротора никаким образом не привязаны к самому ротору и непрерывно меняют по отношению к нему свою ориентацию. Поэтому для выражения степени отличия скорости вращения ротора , n, от скорости вращения магнитного поля статора, n, вводится понятие коэффициента скольжения,s:

Если ротор неподвижен, то n=0 и s=1; если ротор достиг скорости вращения магнитного поля, то n= n и s=0. Следовательно для всех возможных скоростей вращения ротора справедливо неравенство: 0 Режим пуска
В этом режиме принципиальным моментом является неподвижность ротора (s=1) — магнитное поле статора имеет относительно него очень высокую скорость вращения и создает большую ЭДС. Эта ЭДС создает, в свою очередь, в роторе большой ток, чье магнитное поле, пересекая с такой же скоростью собственные неподвижные стержни, создает большую ЭДС самоиндукции. Все это приводит к сдвигу фаз между ЭДС в роторе и его током близкому к 90 0 . Другими словами, ротор в момент пуска имеет большое индуктивное сопротивление.
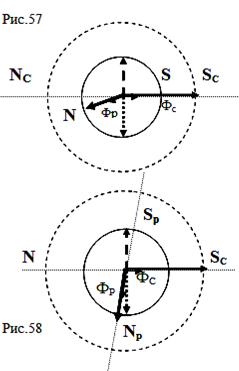
На рис. 57 представлена упрощенная фазовая диаграмма электрических параметров АД в момент пуска. Основным параметром диаграм-мы является магнитный поток статора Фс, отложенный в горизонтальном положении. По часовой стрелке относительно него (вертикально вверх) отложен вектор сетевого напряжения, который должен опережать ток статора и созданный им магнитный поток Фс, на 90 0 , поскольку обмотка статора является индуктивным элементом цепи. Против часовой стрелки (вертикально вниз) отложен вектор ЭДС обмотки ротора, которая всегда отстает от создающего его магнитного потока на 90 0 ( ЭДС обмотки статора, ради упрощения, не приведена). Так как ток обмотки ротора, в свою очередь, отстает от своей ЭДС еще на угол, близкий к 90 0 , то общая ориентация магнитных потоков на диаграмме ФР и Фс в фазовом выражении оказывается близкой к 180 0 . На диаграмме их вектора оказываются ориентироваанными в противоположном направлении.
С другой стороны, фазовые сдвиги векторов на векторных диаграммах должны повторять фазовые сдвиги между параметрами и в реальном пространстве, если последние определены в нем материально. Магнитные потоки, в отличие от токов и напряжений, осуществляют в нем реальное вращения и регистрирующие приборы должны фиксировать между ними те же фазовые сдвиги, что и на векторных диаграммах. Это, в частности, означает, что магнитные потоки в момент пуска вращаются в полости статора под углами близкими к 180 0 — с такой ориентацией полюсов, как показано на рис.57. ( круг со сплошной линией обозначает ротор, а с пунктирной — статор). В частности, из этого следует что в момент пуска, магнитные полюса ротора оказываются под магнитными полюсами статора. Это означает, что силовое взаимодействие между ними имеет в основном радиальный характер. Реальное же вращение создают только касательные взаимодействия, которые , как следует из рисунка, могут быть недостаточно сильными (если полюса находятся точно друг под другом, то касательные взаимодействия вообще пропадают). Это приводит к выводу, подтверждающемуся опытом: асинхронные двигатели с короткозамкнутым ротором обладают слабым пусковым моментом.
Это серьезный недостаток АД, который привел на практике к их вытеснению из ряда практических приложений и замене двигателями постоянного тока, чьи пусковые характеристики существенно лучше. Другим следствием этого недостатка явилось появление асинхронных двигателей с фазным ротором, в которых указанный недостаток преодолевается переходом от короткозамкнутой обмотки к разомкнутой — фазной. Фазная обмотка конструктивно повторяет обмотку статора и в момент пуска замыкается на внешние сопротивления. Появление в обмотке ротора дополнительных сопротивлений меняет взаимную ориентацию магнитных полей (см.далее) статора и ротора в момент пуска — а именно: благодаря сопротивлениям, магнитные полюса ротора выводятся из под магнитных полюсов статора и касательная составляющая их взаимодействия резко увеличивается. Недостатком АД с фазным роторм является их удорожание и усложнение обслуживания; в частности, реостаты после пуска должны выводится из цепи ротора , а обмотка шунтироваться накоротко.
Режим пуска АД с короткозамкнутым ротором имеет и другой существенный недостаток — большие значения тока в момент включения двигателя в обмотке статора. Эти значения могут превышать номинальные, т.е. рабочие, в 5 – 15 раз. В сочетании со слабым пусковым моментом это может привести к выходу из строя двигателя в момент пуска.
Причина этого заключается в уже установленной противофазности магнитного поля ротора и статора. Так как пространственно при пуске они направлены встречно, то суммарное магнитное поле должно существенно снизиться по сравнению с первоначальным магнитным полем статора. Это незамедлительно должно привести к уменьшению ЭДС в обмотке статора, — которая, как следует из векторной диаграммы, в основном, и противостоит сетевому напряжению, — и увеличить ток в двигатель. Именно это и происходит на практике: резкое увеличение тока в статоре восстанавливает суммарное магнитное поле двигателя до первоначального значения.
Вообще, поскольку в момент пуска ротор не вращается, вся магнито-электрическая система АД по всем процессам практически точно воспроизводит процессы в трансформаторе и он сам, в этот момент, является трансформатором. В частности, в трансформаторе возникает такое же взаимное подавление магнитных потоков первичной и вторичной обмоток ( см. «Трансформаторы») и многократное увеличение рабочего тока — по сравнению с током холостого режима — в первичной обмотке при замыкании вторичной на внешнюю нагрузку. Увеличение пускового тока АД в момент пуска создает опасность для целостности обмотки статора и требует на практике дополнительных мер безопасности — например, включение в цепь АД ограничивающих пусковых реостатов.
В. Режим холостого хода
Этот режим характеризуется отсутствием нагрузки на валу двигателя и, как следствие, высокой скоростью вращения ротора. Коэффициент скольжения при этом находится в пределах 0,02 ≤ s ≤ 0,05. Это значит, что относительная скорость вращения (перемещения) ротора и статора очень мала, а следовательно, будет малой и ЭДС, наводимая магнитным полем статора в обмотках ротора.
Малость ЭДС ведет к двум следствиям: а) незначительности тока и магнитного поля ротора; б) незначительности индуктивного сопротивления обмотки ротора, хL≈ 0.
Первое следствие означает небольшую величину взаимодействия магнитных полей ротора и статора и малость вращающего момента – его величины хватает только на то, чтобы, преодолевая незначительные силы трения в подшипниках ротора, поддерживать на постоянном уровне скорость его вращения.
Второе следствие означает п е р п е н д и к у л я р н у ю ориентацию магнитных полей ротора и статора (рис.58). Действительно, на фазовой диаграмме в этом режиме вектор тока ротора, а следовательно и его магнитного потока, будет почти совпадать по фазе с вектором ЭДС обмотки ротора. Это связано с тем что сопротивление ротора будет иметь почти активный характер:

Перпендикулярность магнитных полей значительно увеличивает касательную составляющую взаимодействия, однако в режиме х/х это обстоятельство никак себя не проявляет из-за незначительной величины магнитного поля ротора. Зато это прямым образом влияет на величину тока в обмотке статора: он становится очень малым ( 3-5% от номинального). Причина этого очевидна: магнитное поле статора не встречает противодействия со стороны магнитного поля ротора и создает противоэдс сетевому напряжению даже при незначительном токе в обмотке статора. Эта ситуация воспроизводит режим работы трансформатора при разомкнутой вторичной обмотке.
Тот факт, что перпен-дикулярная ориентация маг-нитных полей ротора и стато-ра значительно увеличивает касательные взаимодействия и, тем самым, — вращающий мо-мент — используется в АД с фазным ротором. Замыкая ра-зомкнутую обмотку ротора на внешние сопротивления, тем самым резко увеличивают акти-вную составляющую ее полного сопротивления. В результате фаза тока становится близкой к фазе ЭДС, а магнитное поле ротора разворачивается пер-пендикулярно магнитному полю статора. Это увеличивает касательные взаимодействие и делает пусковой момент двигателя весьма большим.
С. Рабочий режим
Рабочий режим АД является промежуточным между рассмотренными выше режимами. Действительно, появление нагрузки означает возникновение на валу двигателя тормозного момента и замедление скорости вращения ротора. Это означает, что векторная диаграмма холостого хода должна плавно трансформироваться в векторную диаграмму режима пуска. Легко понять, что это должно проявляться:
а) в изменении угла ориентации магнитных полей ротора и статора от 90 0 до 180 0 ;
б) в увеличении магнитного поля ротора от минимального значения при х/х до максимального значения при пуске.
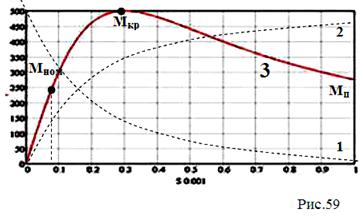
На рис.59 представлены графики зависимости вращающего момента АД и его составляющих от скорости вращения ротора. Кривая 1 описывает поведение касательной составляющей взаимодействия, которая уменьшается с замедлением скорости вращения ротора. Кривая 2 отображает поведение самих сил взаимодействия по модулю, в частности их увеличение с замедлением вращения ротора. В итоге полный вращающий момент двигателя приобретает «колоколообразную» форму (рис.59, «3»).
Зависимость вращающего момента , М вр, от скорости вращения ротора (чаще: от коэффициента скольжения, s) называют механической характеристикой (МХ) асинхронного двигателя.
Нетрудно видеть, что МХ довольно сильно отличается от соответству-ющих характеристик двигателей постоянного тока (рис.51 «а»; «б»). Принципиальным отличием является наличие на ней н и с п а д а ю щ е г о участка, означающего снижение крутящего момента при замедлении скорости вращения ротора двигателя. Этот факт означает, что при превышении противодействующим моментомзначения Мкр – максимального вращающего момента, который может развить двигатель — скорость вращения двигателя упадет до нуля, т.е. до s = 1, и двигатель — если момент не убрать — остановится. Указанный фактор для ряда приложений является неприемлемым, что ограничило диапазон применения двигателей с короткозамкнутым ротором.
Нормальный рабочий режим двигателя осуществляется при Мном. На практике он в 2-3 раза меньше максимальноого момента Мкр.