Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
Общее устройство (Inrunner, Outrunner)
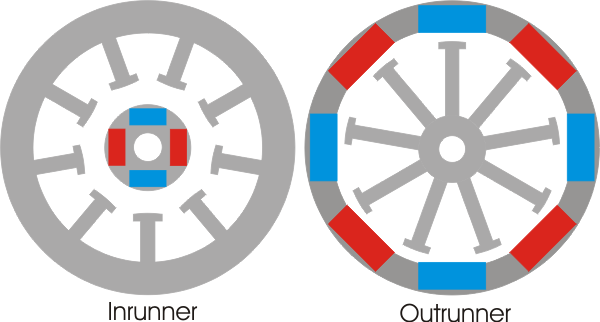
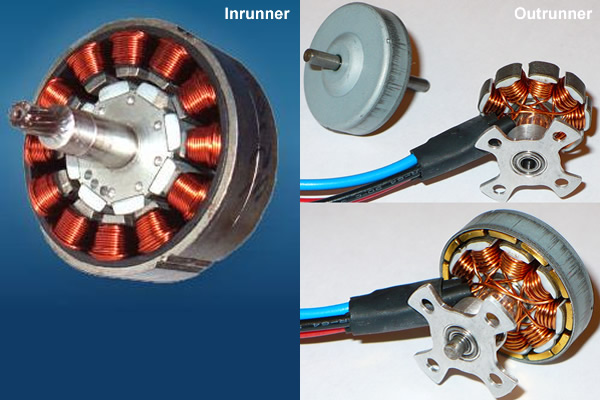
Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.

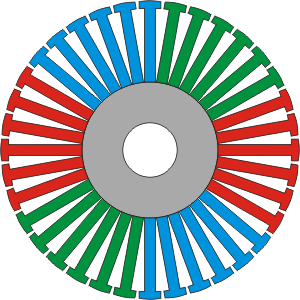
Магниты и полюса
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья

Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
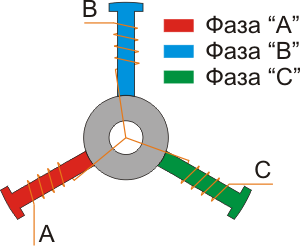
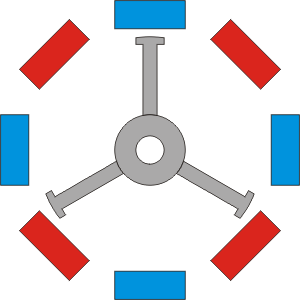
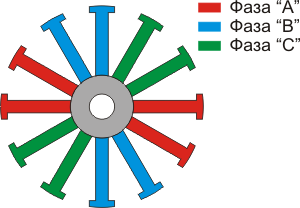
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
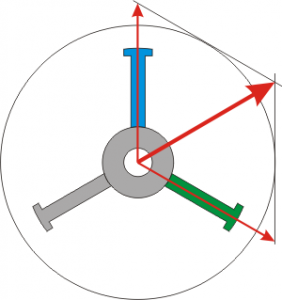
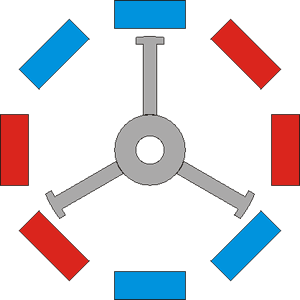
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.
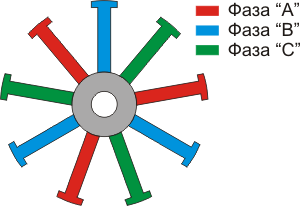
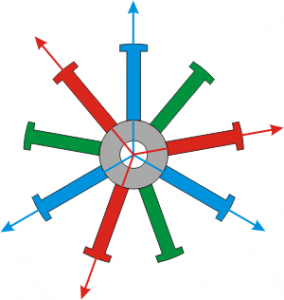
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
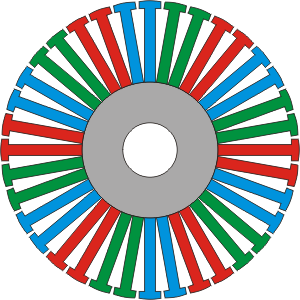
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
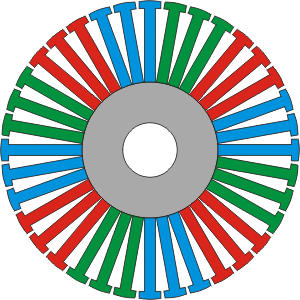
 Вариант обмотки на 12 зубов
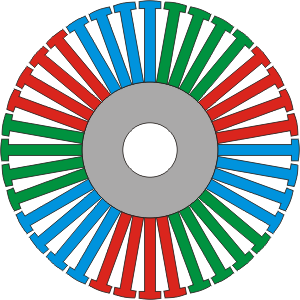
Вариант обмотки на 12 зубов
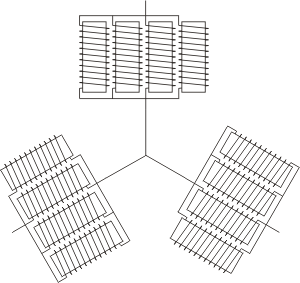
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
 6 групп по 2 зуба
6 групп по 2 зуба
 4 группы по 3 зуба
4 группы по 3 зуба
 3 группы по 4 зуба
3 группы по 4 зуба
 2 группы по 6 зубьев
2 группы по 6 зубьев
Наиболее предпочтительна схема 6 групп по 2 зуба.
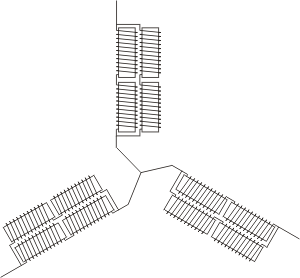
Существует двигатель с 51 зубом на статоре! 17 зубов на одну фазу. 17 — это простое число, оно нацело делится только на 1 и на само себя. Как же распределить обмотку по зубьям? Увы, но я не смог найти в литературе примеров и методик, которые помогли бы решить эту задачу. Оказалось, что обмотка распределялась следующим образом:
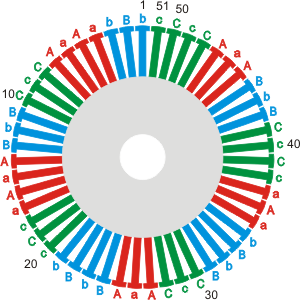
Рассмотрим реальную схему обмотки.
Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.
Обмотки зубьев могут соединяться и параллельно.
Так же могут быть комбинированные включения
Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
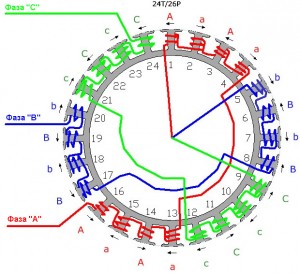
Датчики положения
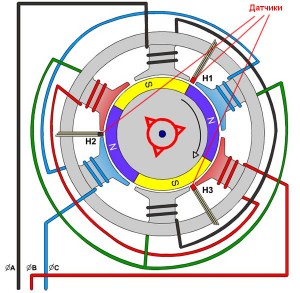
Имеется в виду «электрических» градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:

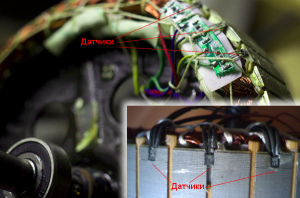
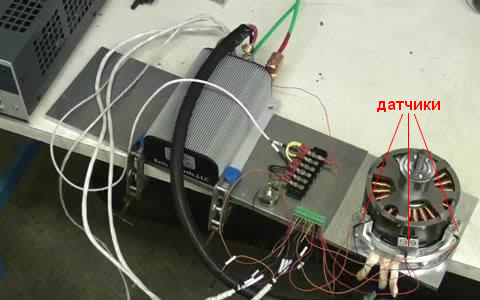
Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.
На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
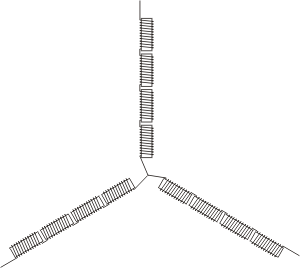
Звезда и Треугольник
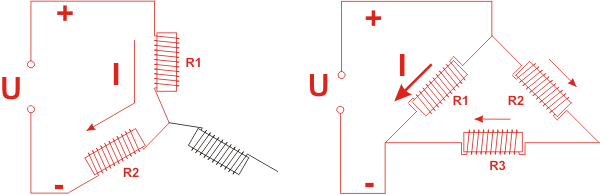
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Что такое бесколлекторный двигатель постоянного тока, как он устроен и работает
Определение
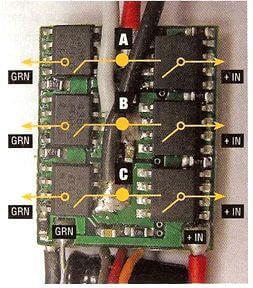
Бесколлекторным называют электродвигатель постоянного тока, ток в обмотках которого переключает специальное устройство-коммутатор — он носит название «драйвер» или «инвертор» и эти обмотки всегда расположены на статоре. Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
В отечественной литературе такие двигатели называют «вентильными» (потому что полупроводниковые ключи называют «вентилями»), и есть разделение таких электромашин на два вида по форме противо—ЭДС. В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС. Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
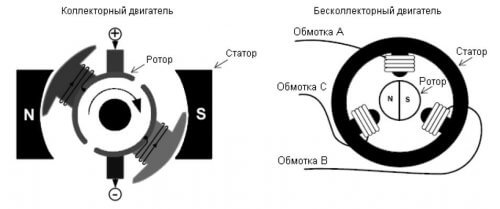
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.

Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.

В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер “знал”, в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.

В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.

Виды БДПТ
Теперь давайте разберемся, какими бывают бесколлекторные двигатели на постоянных магнитах. Их классифицируют по форме противо-ЭДС, конструкции, а также по наличию датчиков положения ротора. Итак, два основных типа отличающихся формой противо-ЭДС, которая наводится в обмотках при вращении ротора:
- BLDC — в них трапецеидальная противо-ЭДС;
- PMSM — противо-ЭДС синусоидальная.
В идеальном случае для них нужны разные источники питания (контроллеры), но на практике они взаимозаменяемы. Но если использовать контроллер с прямоугольными или трапецеидальным выходным напряжением с PMSM-двигателем, то будут слышны характерные звуки, похожие на стук во время вращения.
А по конструкции бесколлекторные двигатели постоянного тока бывают:
- С внутренним ротором. Это более привычное представление электродвигателя, когда статор — это корпус, а вращается вал, расположенный в нём. Часто их называют английским словом «Inrunner». Такой вариант обычно применяют для высокооборотистых электродвигателей
- С внешним ротором. Здесь вращается внешняя часть двигателя с закреплённым на ней валом, в англоязычных источниках его называют «outrunner». Эту схему устройства используют, когда нужен высокий момент.
Выбирают конструкцию в зависимости от того для чего нужен бесколлекторный двигатель в конкретном применении.

Современная промышленность выпускает бесколлекторные двигатели как с датчиками положения ротора, так и без них. Дело в том, что существует множество способов управления БДПТ, для некоторых из них нужны датчики положения, другие определяют положения по ЭДС в обмотках, третьи и вовсе просто подают питание на нужные фазы и электродвигатель самостоятельно синхронизируется с таким питанием и входит в рабочий режим.
Основные характеристики бесколлекторных двигателей постоянного тока:
- Режим работы — длительный или кратковременный.
- Максимальное рабочее напряжение.
- Максимальный рабочий ток.
- Максимальная мощность.
- Максимальные обороты, часто указывают не обороты, а KV — об/в, то есть количество оборотов на 1 вольт приложенного напряжения (без нагрузки на валу). Чтобы получить максимальные обороты — умножьте это число на максимальное напряжение.
- Сопротивление обмотки (чем оно меньше, тем выше КПД), обычно составляет сотые и тысячные доли Ома.
- Угол опережения фазы (timing) — время, через которое ток в обмотке достигнет своего максимума, это связано с её индуктивностью и законами коммутации (ток в индуктивности не может измениться мгновенно.
Схема подключения
Как было сказано выше, для работы бесколлекторного двигателя нужен специальный контроллер. На алиэкспресс можно найти как комплекты из двигателя и контроллера, так и по отдельности. Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Обычно подключение электродвигателя к контроллеру не вызывает затруднений и понятно даже для чайников. Главное, что нужно знать — для смены направления вращения нужно изменить подключение любых двух фаз, собственно также, как и в трёхфазных асинхронных или синхронных электродвигателях.

В сети есть и ряд технических решений и схем как сложных, так и для чайников, которые вы можете увидеть ниже.
В этом видеоролике автор рассказывает, как подружить БК моторчик с «ардуиной».
А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Кстати схему из видео для повторения также прикладываем:

Где применяются бесколлекторные двигатели
Сфера применения таких электродвигателей досрочно широка. Они используются как для привода мелких механизмов: в дисководах CD, DVD-приводах, жёстких дисках, так и в мощных устройствах: аккумуляторе и сетевом электроинструменте (с питанием порядка 12В), радиоуправляемых моделях (например, квадрокоптерах), станках ЧПУ для привода рабочего органа (обычно моторчики с номинальным напряжением 24В или 48В).
Широкое применение БДПТ нашли в электротранспорте, почти все современные мотор-колеса электросамокатов, велосипедов, мотоциклов и автомобилей — это бесколлекторные двигатели. К слову, номинальное напряжение электродвигателей для транспорта лежит в широком пределе, например, мотор-колесо для велосипеда зачастую работает от 36В или от 48В, за редким исключением и больше, а в автомобилях, например, на Toyota Prius порядка 120В, а на Nissan Leaf – доходит до 400, при том что заряжается от сети 220В (это реализуется с помощью встроенного преобразователя).
На самом деле область применения бесколлекторных электродвигателей очень обширна, отсутствие коллекторного узла позволяет его применять опасных местах, а также в местах с повышенной влажностью, без опасений замыканий, искрения или возгорания из-за дефектов в щеточном узле. Благодаря высокому КПД и хорошим массогабаритным показателям они нашли применение и в космической промышленности.
Преимущества и недостатки
Бесколлекторным двигателям постоянного тока, как и другим видам электромашин, присущи определенные достоинства и недостатки.
Преимущества у БДПТ заключаются в следующем:
- Благодаря возбуждению мощными постоянными магнитами (неодимовыми, например) превосходят по моменту и мощности и имеют меньшие габариты, чем асинхронные двигатели. Чем пользуется большинство производителей электротранспорта — от самокатов до автомобилей.
- Нет искрящего щеточно-коллекторного узла, который требует регулярного обслуживания.
- При использовании качественного контроллера в отличие от того же КД не выдают помехи в питающую сеть, что особенно важно в радиоуправляемых устройствах и транспорте с развитым электронным оборудованием в бортовой сети.
- КПД более 80, чаще и 90%.
- Высокая скорость вращения, в отдельных случаях до 100000 об/мин.
Но есть и существенный минус: бесколлекторный двигатель без контроллера — просто кусок железа с медной обмоткой. Он никак не сможет работать. Контроллеры стоят недешево и чаще всего их приходится заказывать в интернет-магазинах или с алиэкспресс. Из-за этого использовать БК-моторы в моделях и устройствах домашнего производства не всегда возможно.
Теперь вы знаете, что такое бесколлекторный двигатель постоянного тока, как он работает и где применяется. Надеемся, наша статья помогла вам разобраться во всех вопросах!