Подключение моторчика к Ардуино

Подключение мотора к Ардуино ► потребуется при сборке машинки или катера. Рассмотрим различные варианты подключения коллекторного двигателя к Arduino.
Подключение мотора постоянного тока к Ардуино (коллекторного двигателя) требуется при сборке машинки или катера на микроконтроллере Arduino. Рассмотрим различные варианты подключения двигателей постоянного тока: напрямую к плате, через биполярный транзистор, а также с использованием модуля L298N. В обзоре размещены схемы подключения и коды программ для всех перечисленных вариантов.
Управление двигателем на Ардуино
Коллекторный моторчик может быть рассчитан на разное напряжения питания. Если двигатель работает от 3-5 Вольт, то можно моторчик подключать напрямую к плате Ардуино. Моторы для машинки с блютуз управлением, которые идут в комплекте с редукторами и колесами рассчитаны уже на 6 Вольт и более, поэтому ими следует управлять через полевой (биполярный) транзистор или через драйвер L298N.
Принцип работы и устройство мотора постоянного тока
На схеме показано устройство моторчика постоянного тока и принцип его работы. Как видите, для того, чтобы ротор двигателя начал крутиться к нему необходимо подключить питание. При смене полярности питания, ротор начнет крутиться в обратную сторону. Драйвер двигателей L298N позволяет инвертировать направление вращения мотора fa 130, поэтому его удобнее использовать в своих проектах.
Как подключить моторчик к Arduino
Для этого занятия нам потребуется:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- мотор постоянного тока (Motor DC);
- транзистор полевой/биполярный;
- драйвер двигателей L298N;
- провода «папа-папа», «папа-мама».
Перед выбором способа управления двигателем от Arduino Uno r3, уточните на какое напряжение рассчитан ваш моторчик. Если питание требуется более 5 Вольт, то следует использовать транзистор или драйвер. Распиновка транзисторов может отличаться от приведенного примера (следует уточнить распиновку для своего типа). Драйвер L298N позволит не только включать мотор, но и изменять направление вращения.
Скетч. Подключение мотора напрямую
Подключение мотора к Ардуино напрямую — самый простой вариант включения вентилятора на Arduino или машинки. Команда для включения двигателя не отличается, от команды при подключении светодиода к микроконтроллеру. Функция digitalWrite включает/выключает подачу напряжения на цифровой порт, к которому подключен двигатель постоянного тока. Соберите схему и загрузите программу.
Пояснения к коду:
- для подключения мотора без драйвера можно использовать любой порт;
- если двигатель не включается, то, возможно, не хватает силы тока на цифровом выходе, подключите двигатель через транзистор к порту 3,3V или 5V.
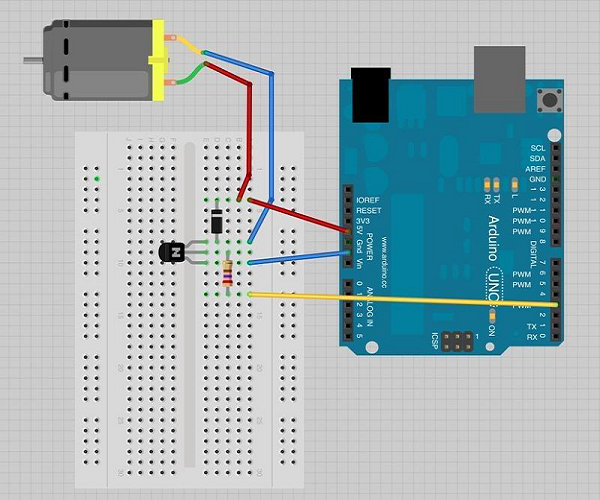
Скетч. Подключение мотора через транзистор
Подключение мотора через транзистор к Ардуино потребуется, если двигатель никак не хочет включаться от платы напрямую, то следует использовать порт 5 Вольт на микроконтроллере или внешний источник питания. Транзистор будет играть роль ключа, замыкая/размыкая электрическую цепь. Сам транзистор управляется цифровым портом. Соберите схему, как на картинке и загрузите программу.
Подключение FA-130 мотора постоянного тока — Motor DC Arduino
Пояснения к коду:
- при необходимости можно подключить два мотора FA-130 к Ардуино;
- в зависимости от характеристик, двигатель подключается к 3,3 или 5 Вольтам.
Скетч. Подключение мотора через драйвер
Подключение мотора к Ардуино через драйвер L298N или Motor Shield L293D позволит менять направление вращения ротора. Но для использования данных модулей потребуется установить соответствующие библиотеки для Ардуино. В примере мы использовали схему подключения двигателя с помощью модуля L298N. Соберите схему, как на картинке ниже и загрузите следующий скетч с использованием.
Arduino — двигатель постоянного тока
В этой главе мы будем связывать различные типы двигателей с платой Arduino (UNO) и покажем вам, как подключить двигатель и управлять им с вашей платы.
Есть три разных типа двигателей —
- Двигатель постоянного тока
- Серводвигатель
- Шаговый двигатель
Двигатель постоянного тока (двигатель постоянного тока) является наиболее распространенным типом двигателя. Двигатели постоянного тока обычно имеют только два провода, один положительный и один отрицательный. Если вы подключите эти два провода напрямую к аккумулятору, двигатель будет вращаться. Если вы переключите провода, двигатель будет вращаться в противоположном направлении.

Предупреждение. Запрещается приводить двигатель в движение непосредственно от выводов платы Arduino. Это может повредить доску. Используйте схему драйвера или IC.
Мы разделим эту главу на три части —
- Просто сделай мотор крутится
- Контроль скорости двигателя
- Контролировать направление вращения двигателя постоянного тока
Необходимые компоненты
Вам понадобятся следующие компоненты —
- 1x Arduino UNO доска
- 1x PN2222 Транзистор
- 1x малый 6В постоянного тока
- 1x 1N4001 диод
- 1x 270 Ом Резистор
Процедура
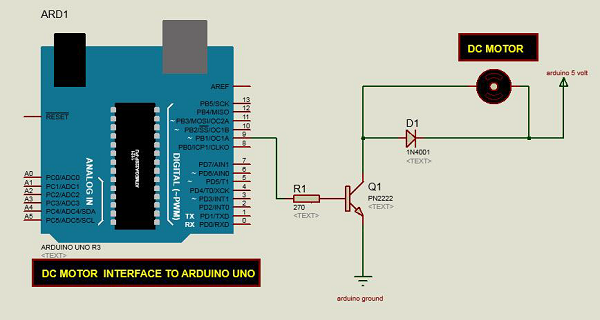
Следуйте электрической схеме и выполните соединения, как показано на рисунке ниже.
Меры предосторожности
При подключении соблюдайте следующие меры предосторожности.
Сначала убедитесь, что транзистор подключен правильно. Плоская сторона транзистора должна быть обращена к плате Arduino, как показано на схеме.
Во-вторых, полосатый конец диода должен быть направлен к линии питания + 5 В в соответствии с расположением, показанным на рисунке.
Сначала убедитесь, что транзистор подключен правильно. Плоская сторона транзистора должна быть обращена к плате Arduino, как показано на схеме.
Во-вторых, полосатый конец диода должен быть направлен к линии питания + 5 В в соответствии с расположением, показанным на рисунке.
Spin ControlArduino Code
Код для заметки
Транзистор действует как переключатель, управляющий питанием двигателя. Контакт 3 Arduino используется для включения и выключения транзистора, и на эскизе ему присваивается название «motorPin».
Результат
Двигатель будет вращаться на полной скорости, когда вывод Arduino № 3 поднимется высоко.
Контроль скорости двигателя
Ниже приведена принципиальная схема двигателя постоянного тока, подключенного к плате Arduino.
Arduino Code
Код для заметки
Транзистор действует как переключатель, управляющий мощностью двигателя. Контакт 3 Arduino используется для включения и выключения транзистора, и на эскизе ему присваивается название «motorPin».
Когда программа запускается, она предлагает вам ввести значения для управления скоростью двигателя. Вам необходимо ввести значение от 0 до 255 в Serial Monitor.
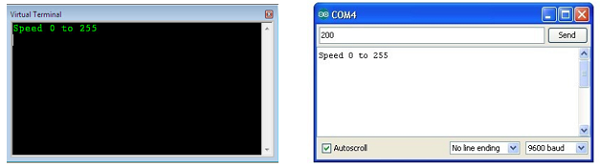
В функции «loop» команда «Serial.parseInt» используется для считывания числа, введенного в виде текста в Serial Monitor, и преобразования его в «int». Вы можете ввести любой номер здесь. Оператор ‘if’ в следующей строке просто выполняет аналоговую запись с этим номером, если число находится в диапазоне от 0 до 255.
Результат
Двигатель постоянного тока будет вращаться с различными скоростями в соответствии со значением (от 0 до 250), полученным через последовательный порт.
Контроль направления вращения
Для управления направлением вращения двигателя постоянного тока без замены проводов можно использовать схему, называемую H-мостом . H-мост — это электронная схема, которая может управлять двигателем в обоих направлениях. H-мосты используются во многих различных приложениях. Одним из наиболее распространенных приложений является управление двигателями в роботах. Он называется H-мостом, потому что он использует четыре транзистора, соединенных таким образом, что принципиальная схема выглядит как «H».
Мы будем использовать L298 H-Bridge IC здесь. L298 может контролировать скорость и направление двигателей постоянного тока и шаговых двигателей, а также может управлять двумя двигателями одновременно. Его текущий рейтинг составляет 2А для каждого двигателя. Однако при таких токах вам необходимо использовать радиаторы.
Необходимые компоненты
Вам понадобятся следующие компоненты —
- 1 × L298 мостовая ИС
- 1 × двигатель постоянного тока
- 1 × Arduino UNO
- 1 × макет
- 10 × перемычек
Процедура
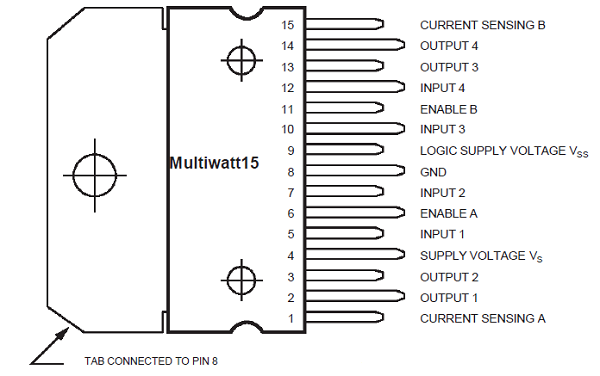
Ниже приведена принципиальная схема интерфейса двигателя постоянного тока с платой Arduino Uno.
На схеме выше показано, как подключить микросхему L298 для управления двумя двигателями. Для каждого двигателя имеется три входных контакта: Вход1 (IN1), Вход2 (IN2) и Разрешить1 (EN1) для Двигателя1 и Вход3, Вход4 и Разрешить2 для Двигателя2.
Поскольку в этом примере мы будем управлять только одним двигателем, мы подключим Arduino к IN1 (контакт 5), IN2 (контакт 7) и Enable1 (контакт 6) микросхемы L298. Контакты 5 и 7 являются цифровыми, т. Е. Входы ВКЛ или ВЫКЛ, а для вывода 6 требуется сигнал с широтно-импульсной модуляцией (ШИМ) для контроля скорости двигателя.
В следующей таблице показано направление вращения двигателя на основании цифровых значений IN1 и IN2.
| В 1 | IN2 | Мотор Поведение |
|---|---|---|
| ТОРМОЗНАЯ | ||
| 1 | ВПЕРЕД | |
| 1 | BACKWARD | |
| 1 | 1 | ТОРМОЗНАЯ |
Контакт IN1 микросхемы L298 подключен к контакту 8 Arduino, а IN2 подключен к контакту 9. Эти два цифровых контакта Arduino контролируют направление двигателя. EN Контакт IC подключен к выводу 2 ШИМ Arduino. Это будет контролировать скорость двигателя.
Чтобы установить значения выводов Arduino 8 и 9, мы использовали функцию digitalWrite (), а для установки значения вывода 2 мы должны использовать функцию analogWrite ().
Шаги подключения
- Подключите 5V и заземление IC к 5V и заземлению Arduino соответственно.
- Подключите двигатель к контактам 2 и 3 микросхемы.
- Подключите IN1 IC к контакту 8 Arduino.
- Подключите IN2 IC к контакту 9 Arduino.
- Подключите EN1 IC к контакту 2 Arduino.
- Подключите SENS A контакт IC к земле.
- Подключите Arduino с помощью USB-кабеля Arduino и загрузите программу в Arduino с помощью программного обеспечения Arduino IDE.
- Подайте питание на плату Arduino с помощью блока питания, аккумулятора или USB-кабеля.
Arduino Code
Результат
Двигатель будет сначала вращаться в направлении по часовой стрелке (CW) в течение 3 секунд, а затем в течение 3 секунд против часовой стрелки (CCW).
Управление щёточными моторами с Arduino
Как вы знаете, никакую нагрузку мощнее светодиода нельзя подключать к Ардуино напрямую, особенно моторчики. Ардуино, да и вообще любой микроконтроллер – логическое устройство, которое может давать только логические сигналы другим железкам, а те уже могут управлять нагрузкой. Кстати, урок по управлению мощной нагрузкой постоянного и переменного тока у меня тоже есть. “Драйвером” мотора могут быть разные железки, рассмотрим некоторые из них.
При помощи обычного реле можно просто включать и выключать мотор по команде digitalWrite(пин, состояние) , прямо как светодиод:

При помощи двойного модуля реле (или просто двух реле) можно включать мотор в одну или другую сторону, а также выключать:

Купить модуль реле можно на Aliexpress.
Мосфет
Полевой транзистор, он же мосфет, позволяет управлять скорость вращения мотора при помощи ШИМ сигнала. При использовании мосфета обязательно нужно ставить диод, иначе индуктивный выброс с мотора очень быстро убьёт транзистор. Скорость мотора можно задавать при помощи ардуиновской analogWrite(пин, скорость) .

Вместо “голого” мосфета можно использовать готовый китайский модуль:

Купить мосфет модуль можно на Aliexpress.
Реле и мосфет
Если объединить реле и мосфет – получим весьма колхозную, но рабочую схему управления скоростью и направлением мотора:

Специальный драйвер
Лучше всего управлять мотором при помощи специального драйвера, они бывают разных форм и размеров и рассчитаны на разное напряжение и ток, но управляются практически одинаково. Рассмотрим основные драйверы с китайского рынка:
| Драйвер | Vmot | Ток (пик) | Стоимость | Aliexpress |
| L298N | 4-50V | 1A (2A) | 100р | Купить |
| MX1508 | 2-9.6V | 1.5A (2.5A) | 20р | Купить |
| TA6586 | 3-14V | 5A (7A) | 100р (чип 30р) | Купить, купить, купить чип |
| L9110S | 2.5-12V | 0.8A (1.5A) | 50р | Купить |
| TB6612 | 4.5-13.5V | 1.2A (3A) | 80р | Купить |
| BTS7960 | 5.5-27V | 10A (43A) | 300р | Купить |
| Большой | 3-36V | 10A (30A) | 700р | Купить |
Остальные драйверы смотри у меня вот тут. Схемы подключения и таблицы управления:








Пины направления управляются при помощи digitalWrite(pin, value) , а PWM – analogWrite(pin, value) . Управление драйвером по двум пинам может быть двух вариантов:
Моторы переменного тока
Мотором переменного тока (220V от розетки) можно управлять при помощи диммера на симисторе, как в уроке про управление нагрузкой.
Библиотеки
У меня есть удобная библиотека для управления мотором – GyverMotor, документацию можно почитать вот здесь. Особенности библиотеки:
- Контроль скорости и направления вращения
- Работа с ШИМ любого разрешения
- Программный deadtime
- Отрицательные скорости
- Поддержка всех типов драйверов
- Плавный пуск и изменение скорости
- Режим “минимальная скважность”
Помехи и защита от них
Индуктивный выброс напряжения
Мотор – это индуктивная нагрузка, которая в момент отключения создаёт индуктивные выбросы. У мотора есть щетки, которые являются источником искр и помех за счёт той же самой индуктивности катушки. Сам мотор потребляет энергию не очень равномерно, что может стать причиной помех по линии питания, а пусковой ток мотора так вообще сильно больше рабочего тока, что гарантированно просадит слабое питание при запуске. Все четыре источника помех могут приводить к различным глюкам в работе устройства вплоть до срабатывания кнопок на цифровых пинах, наведения помех на аналоговых пинах, внезапного зависания и даже перезагрузки микроконтроллера или других железок в сборе устройства.
Отсечь индуктивный выброс с мотора можно при помощи самого обычного диода, чем мощнее мотор, тем мощнее нужен диод, то есть на более высокое напряжение и ток. Диод ставится встречно параллельно мотору, и чем ближе к корпусу, тем лучше. Точно таким же образом рекомендуется поступать с электромагнитными клапанами, соленоидами, электромагнитами и вообще любыми другими катушками. Логично, что диод нужно ставить только в том случае, если мотор или катушка управляется в одну сторону. Важные моменты:
- При работе с драйвером и управлением в обе стороны диод ставить не нужно и даже нельзя!
- При управлении ШИМ сигналом рекомендуется ставить быстродействующие диоды (например серии 1N49xx ) или диоды Шоттки (например серии 1N58xx).
- Максимальный ток диода должен быть больше или равен максимальному току мотора.
- Защитный диод, принимающий на себя обратный выброс ЭДС самоиндукции, также называется шунтирующим диодом, снаббером, flyback диодом.
- В природе существуют мосфеты со встроенным защитным диодом. Этот диод является отдельным элементом и такой мосфет обычно имеет нестандартный корпус, читайте документацию на конкретный транзистор.
- Диод, который показан на схематическом изображении мосфета, не является защитным диодом: это слабый и медленный “паразитный” диод, образованный при производстве транзистора. Он не защитит мосфет от выброса, нужно обязательно ставить внешний!
Помехи от щёток
Искрящиеся щетки мотора, особенно старого и разбитого, являются сильным источником электромагнитных помех, и здесь проблема решается установкой керамических конденсаторов с ёмкостью 0.1-1 мкФ на выводы мотора. Такие же конденсаторы можно поставить между каждым выводом и металлическим корпусом, это ещё сильнее погасит помехи. Для пайки к корпусу нужно использовать мощный паяльник и активный флюс, чтобы залудиться и припаяться как можно быстрее, не перегревая мотор. 
Помехи по питанию, просадка
Мотор потребляет ток не очень равномерно, особенно во время разгона или в условиях переменной нагрузки на вал, что проявляется в виде просадок напряжения по питанию всей схемы. Беды с питанием решаются установкой ёмких электролитических конденсаторов по питанию, логично что ставить их нужно максимально близко к драйверу, то есть до драйвера. Напряжение должно быть выше чем напряжение питания, а ёмкость уже подбирается по факту. Начать можно с 470 мкф и повышать, пока не станет хорошо.
Разделение питания
Если описанные выше способы не помогают – остаётся только одно: разделение питания. Отдельный малошумящий хороший источник на МК и сенсоры/модули, и отдельный – для силовой части, в том числе мотора. Иногда ради стабильности работы приходится вводить отдельный БП или отдельный аккумулятор для надёжности функционирования устройства.
Экранирование
В отдельных случаях критичными являются даже наводки от питающих проводов моторов, особенно при управлении ШИМ мощными моторами и управлении мощными шаговиками в станках. Такие наводки могут создавать сильные помехи для работающих рядом чувствительных электронных компонентов, на аналоговые цепи, наводить помехи на линии измерения АЦП и конечно же на радиосвязь. Защититься от таких помех можно при помощи экранирования силовых проводов: экранированные силовые провода не всегда удаётся купить, поэтому достаточно обмотать обычные провода фольгой и подключить экран на GND питания силовой части. Этот трюк часто используют RC моделисты, летающие по FPV.