Шаговые двигатели
 Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Шаговые двигатели являются приводными исполнительными механизмами, обеспечивающими фиксированные угловые перемещения (шаги). Каждое изменение угла поворота ротора — это реакция шагового двигателя на входной импульс.
Дискретный электропривод с шаговым двигателем естественным образом сочетается с цифровыми управляющими устройствами, что позволяет успешно использовать его в станках с числовым программным управлением, в промышленных роботах и манипуляторах, в часовых механизмах.
Дискретный электропривод может быть реализован также с помощью серийных асинхронных электродвигателей, которые за счет специального управления могут работать в шаговом режиме.
 Шаговые двигатели применяются в электроприводах мощностью от долей ватта до нескольких киловатт. Расширение шкалы мощности дискретного электропривода может быть достигнуто при использовании серийных асинхронных электродвигателей, которые за счет соответствующего управления могут работать в шаговом режиме.
Шаговые двигатели применяются в электроприводах мощностью от долей ватта до нескольких киловатт. Расширение шкалы мощности дискретного электропривода может быть достигнуто при использовании серийных асинхронных электродвигателей, которые за счет соответствующего управления могут работать в шаговом режиме.
Принцип действия шаговых двигателей всех типов состоит в следующем. С помощью электронного коммутатора вырабатываются импульсы напряжения, которые подаются на обмотки управления, расположенные на статоре шагового двигателя.
В зависимости от последовательности возбуждения обмоток управления происходит то или иное дискретное изменение магнитного поля в рабочем зазоре двигателя. При угловом перемещении оси магнитного поля обмоток управления шагового двигателя его ротор дискретно поворачивается вслед за магнитным полем. Закон поворота ротора определяется последовательностью, скважностью и частотой управляющих импульсов, а также типом и конструктивными параметрами шагового двигателя.
Принцип действия шагового двигателя (получение дискретного перемещения ротора) рассмотрим на примере простейшей схемы двухфазного шагового двигателя (рис. 1).
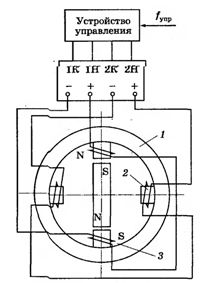
Рис. 1. Упрощенная схема шагового двигателя с активным ротором
Шаговый двигатель имеет на статоре две пары явно выраженных полюсов, на которых Находятся обмотки возбуждения (управления): обмотка 3 с выводами 1Н — 1К и обмотка 2 с выводами 2Н — 2К. Каждая обмотка состоит из двух частей, находящихся на противоположных полюсах статора 1 ШД.
Ротор в рассматриваемой схеме представляет собой двухполюсный постоянный магнит. Обмотки питаются импульсами от устройства управления, которое преобразует одноканальную последовательность входных импульсов управления f упр, в многоканальную (по числу фаз шагового двигателя).
 Рассмотрим работу шагового двигателя, предположив, что в начальный момент напряжение подано на обмотку 3. Ток в этой обмотке вызовет намагничивание вертикально расположенных полюсов N и 8. В результате взаимодействия магнитного поля с постоянным магнитом ротора последний займет равновесное положение, в котором оси магнитных полей статора и ротора совпадают.
Рассмотрим работу шагового двигателя, предположив, что в начальный момент напряжение подано на обмотку 3. Ток в этой обмотке вызовет намагничивание вертикально расположенных полюсов N и 8. В результате взаимодействия магнитного поля с постоянным магнитом ротора последний займет равновесное положение, в котором оси магнитных полей статора и ротора совпадают.
Положение будет устойчивым, поскольку на ротор действует синхронизирующий момент, стремящийся возвратить ротор в положение равновесия: М = М m ах х sin α ,
где М m ах — максимальный момент, α — угол между осями магнитных полей статора и ротора.
При переключении блоком управления напряжения с обмотки 3 на обмотку 2 образуется магнитное поле с горизонтальными полюсами, т.е. магнитное поле статора совершает дискретный поворот на четверть окружности статора. При этом между осями статора и ротора появится угол рассогласования α = 90° и на ротор будет действовать максимальный вращающий момент Мшах. Ротор повернется на угол α = 90° и займет новое устойчивое положение. Таким образом, вслед за шаговым перемещением поля статора совершает шаговое перемещение ротор двигателя.
 Основной режим работы шагового двигателя — динамический. Шаговые двигатели в отличие от синхронных рассчитаны на вхождение в синхронизм из состояния покоя и принудительное электрическое торможение. Благодаря этому в шаговом электроприводе обеспечивается пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую.
Основной режим работы шагового двигателя — динамический. Шаговые двигатели в отличие от синхронных рассчитаны на вхождение в синхронизм из состояния покоя и принудительное электрическое торможение. Благодаря этому в шаговом электроприводе обеспечивается пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую.
Пуск шагового двигателя осуществляется скачкообразным или постепенным увеличением частоты входного сигнала от нуля до рабочей, торможение — снижением ее до нуля, а реверс — изменением последовательности коммутации обмоток шагового двигателя.
Шаговые двигатели характеризуются следующими параметрами: число фаз (обмоток управления) и схема их соединения, тип шагового двигателя (с активным или пассивным ротором), одиночный шаг ротора (угол поворота ротора при единичном импульсе), номинальное напряжение питания, максимальный статический хронизирующий момент, номинальный вращающий момент, момент инерции ротора, частота приемистости.
Шаговые двигатели бывают однофазными, двухфазными и многофазными с активным или пассивным ротором. Управление шаговым двигателем обеспечивается электронным блоком управления. Пример схемы управления шаговым двигателем приведен на рисунке 2.
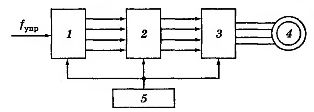
Рис. 2. Функциональная схема разомкнутого электропривода с шаговым двигателем
Сигнал управления f упр в виде импульсов напряжения поступает на вход блока 1, преобразующего последовательность импульсов, например в четырехфазную систему однополярных импульсов (в соответствии с числом фаз шагового двигателя).
Блок 2 формирует эти импульсы по длительности и амплитуде, необходимым для нормальной работы коммутатора 3, к выходам которого подключены обмотки шагового двигателя 4. Коммутатор и остальные блоки питаются от источника постоянного тока 5.
При повышенных требованиях к качеству дискретного привода применяют замкнутую схему шагового электропривода (рис. 3), которая кроме шагового двигателя включает преобразователь П, коммутатор К и датчик шага ДШ. В таком дискретном приводе информация о действительном положении вала рабочего механизма РМ и скорости шагового двигателя поступает на вход автоматического регулятора, который обеспечивает заданный характер движения привода.
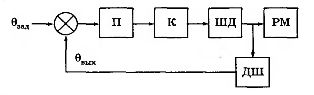
Рис. 3. Функциональная схема замкнутого дискретного привода
В современных системах дискретного привода применяются микропроцессорные средства управления. Область применения приводов с шаговыми двигателями постоянно расширяется. Их использование перспективно в сварочных автоматах, приборах времени, лентопротяжных и регистрирующих механизмах, системах управления топливоподачей двигателей внутреннего сгорания.
Преимущества шаговых двигателей:
высокая точность, даже в разомкнутой структуре управления, т. е. без датчика угла поворота;
естественная интеграция с приложениями цифрового управления;
отсутствие механических коммутаторов, которые часто создают проблемы в двигателях других типов.
Недостатки шаговых двигателей:
малый вращающий момент но сравнению с двигателями приводов непрерывного типа;
высокий уровень вибрации из-за скачкообразного движения;
большие ошибки и колебания при потере импульсов в системах с разомкнутым контуром управления.
Преимущества шаговых двигателей намного превосходят их недостатки, поэтому они часто применяются в тех случаях, когда достаточно небольшой мощности приводных устройств.
В статье использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
CNC-DESIGN
В корзине пусто!
Шаговые двигатели — конструкция, принцип работы и применение
Что такое шаговый двигатель?
Шаговый двигатель представляет собой бесщеточное электромеханическое устройство, которое преобразует последовательность электрических импульсов, приложенных к его обмоткам возбуждения, в точно определенное пошаговое механическое вращение. На каждый импульс вал двигателя вращается на фиксированный угол, при получении нескольких импульсов, он поворачивается на определенный угол. Этот угол, на который вал шагового двигателя поворачивается для каждого импульса, называется угловым шагом, который обычно выражается в градусах.
Количество входных импульсов, подаваемых на двигатель, определяет угловой шаг, и, следовательно, положение вала двигателя контролируется путем отправки пакета импульсов. Эта уникальная особенность делает шаговый двигатель хорошо подходящим для системы управления без обратной связи, в которой точное положение вала поддерживается с точным количеством импульсов без использования датчика обратной связи. Чем меньше угловой шаг, тем больше будет число шагов на оборот, и тем выше будет точность получаемого положения. Углы шага могут составлять от 90 градусов до 0,72 градуса, обычно используемые углы шага составляют 1,8 градуса, 2,5 градуса, 7,5 градуса и 15 градусов.
Направление вращения вала зависит от последовательности импульсов, поданных на обмотки статора. Скорость вращения вала двигателя прямо пропорциональна частоте входных импульсов, подаваемых на обмотки возбуждения.
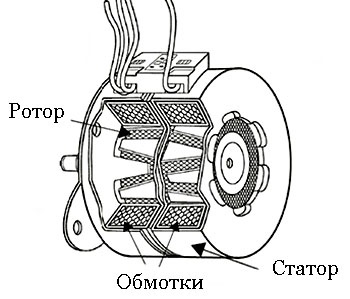
Как и у всех электродвигателей, он имеет статор и ротор.
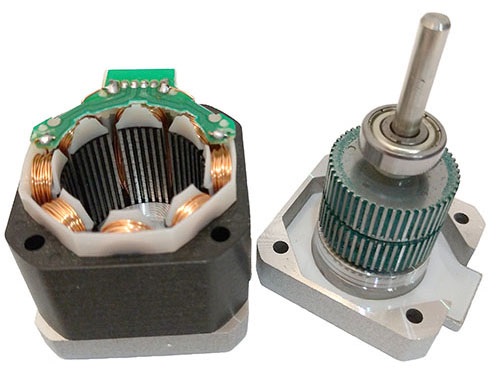
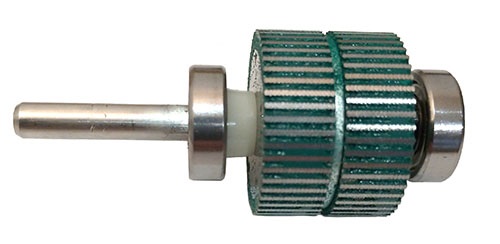
Ротор это подвижная часть, которая не имеет обмоток, щеток и коммутатора. Обычно роторы выполняются из магнито-мягкого или из магнито-твёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
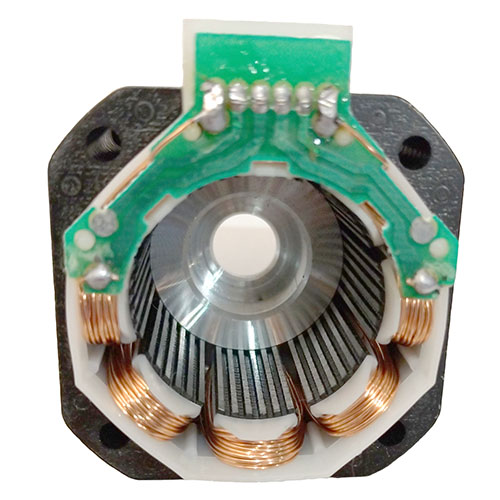
Статор часто состоит из многополюсных и многофазных обмоток возбуждения , обычно из трех или четырехфазных, намотанных на необходимое количество полюсов, определяемое желаемым угловым смещением на импульс.
В отличие от других двигателей он работает с запрограммированными дискретными управляющими импульсами, которые подаются на обмотки статора через электронный привод. Вращение происходит за счет магнитного взаимодействия между полюсами последовательно включенной обмотки статора и полюсами ротора.
Типы Шаговых Двигателей
Существует три основных категории шаговых двигателей, а именно:
— реактивный (ротор из магнитомягкого материала) ;
— с постоянными магнитами (ротор из магнитотвёрдого материала);
Во всех этих двигателях в статоре используются обмотки возбуждения. Напряжение постоянного тока подается на катушки обмоток возбуждения, и каждый вывод обмотки подключается к источнику через твердотельный переключатель. В зависимости от типа шагового двигателя,конструкция ротора состоит из ротора из мягкой стали с выступающими полюсами, цилиндрического ротора с постоянным магнитом и постоянного магнита с зубьями из мягкой стали. Рассмотрим эти типы подробнее.
Реактивный шаговый двигатель
Это базовый тип шагового двигателя, который существует уже давно, и он обеспечивает самый простой способ понять принцип работы со структурной точки зрения. Как следует из названия, угловое положение ротора зависит от сопротивления магнитной цепи, образованной между полюсами статора (зубьями) и зубьями ротора.
Конструкция реактивного шагового двигателя
Двигатель состоит из намотанного статора и многозубого ротора из магнитомягкого материала. Статор состоит из стальных пластин, на которые намотаны обмотки. Обычно он наматывается на три фазы, которые распределены между парами полюсов. Количество полюсов сформированного таким образом статора кратно четному числу фаз, для которых намотаны обмотки. На рисунке ниже, статор имеет 12 одинаково расположенных выступающих полюсов, где каждый полюс намотан возбуждающей катушкой. Эти три фазы запитываются от источника постоянного тока.
Ротор имеет выступающие полюса, выполненный полностью из магнитомягкого материала . Выступающие зубцы полюса ротора имеют такую же ширину, что и зубцы статора. Количество полюсов на статоре отличается от числа полюсов ротора, что обеспечивает возможность самостоятельного запуска и двунаправленного вращения двигателя.
Принцип работы реактивного шагового двигателя
Принцип работы шагового двигателя заключается в позиционировании ротора в определ енном положении с зубцами полюса возбуждения в магнитной цепи минимального сопротивления. При подачи сигнала на двигатель и возбуждении определенную обмотку, он создает свое магнитное поле и развивает собственные магнитные полюса. Из-за остаточного магнетизма в полюсах ротора сигнал заставит ротор двигаться в положение с минимальным сопротивлением, и, следовательно, один набор полюсов ротора совмещается с активным набором полюсов статора. В этом положении ось магнитного поля статора совпадает с осью, проходящей через любые два магнитных полюса ротора. Когда ротор совпадает с полюсами статора, он обладает достаточной магнитной силой, чтобы удержать вал от перемещения в следующее положение, либо по часовой стрелке, либо против часовой стрелки.
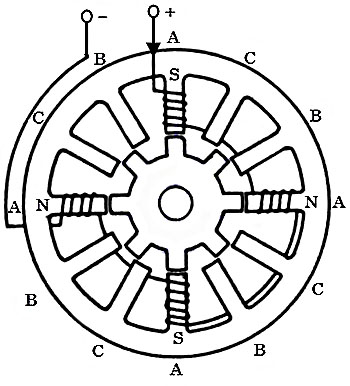
Рассмотрим принципиальную схему 3-фазного, 6 полюсов статора и 4 зубьев ротора, показанного на рисунке ниже. Когда фаза A-A снабжается подаче постоянного тока путем замыкания переключателя S1, обмотка становится магнитом, в результате чего один зуб становится «+», а другой «-«. Таким образом, магнитная ось статора лежит вдоль этих полюсов. Благодаря силе притяжения, катушка статора «+» притягивает ближайший зубец ротора противоположной полярности, то есть «+» и «-» притягивает ближайший зубец ротора противоположной полярности, то есть «+». Затем ротор настраивается в положение минимального сопротивления, где магнитная ось ротора точно совпадает с магнитной осью статора.
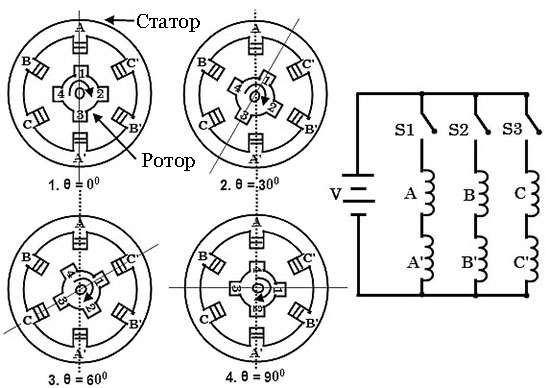
Когда фаза B-B запитывается от замыкания переключателя S2, а фаза A-A остается обесточенной при размыкании выключателя S1, обмотка B-B ‘создает магнитный поток, и, следовательно, магнитная ось статора смещается вдоль полюсов. таким образом, образованный им. Следовательно, ротор с намагниченными зубьями статора перемещается с минимальным сопротивлением и вращается на угол 30 градусов по часовой стрелке.
Когда на выключатель S3 подается напряжение после размыкания выключателя S2, на фазу C-C подается питание, зубья ротора выравниваются в новом положении, перемещаясь на дополнительный угол 30 градусов. Таким образом, ротор движется по часовой стрелке или против часовой стрелки, последовательно возбуждая обмотки статора с определенной последовательностью. Угол шага этого трехфазного 4-полюсного шагового двигателя с зубьями ротора выражается как 360 / (4 х 3) = 30 градусов (как угол шага = 360 / Nr х q).
Угол шага может быть дополнительно уменьшен путем увеличения числа полюсов на статоре и роторе, в таких случаях в двигателях часто наматываются дополнительные обмотки. Это также может быть достигнуто за счет использования различных конструкций шаговых двигателей, таких как многоступенчатое расположение и механизм редуктора.
Шаговый двигатель с постоянными магнитами
Конструкция двигателя с постоянными магнитами является, пожалуй, наиболее распространенной среди нескольких типов шаговых двигателей. Как следует из названия, к конструкции двигателя добавляются постоянные магниты. Основным преимуществом этого мотора является его низкая себестоимость. Этот тип двигателя имеет 48 — 24 шагов на оборот.
Конструкция шагового двигателя с постоянными магнитами
В этом двигателе статор является многополюсным, и его конструкция аналогична реактивному шаговому двигателю, как обсуждалось выше. Он состоит из щелевой периферии, на которую намотаны катушки возбуждения статора, которые могут быть двух-, трех- или четырехфазными. Концевые клеммы всех этих обмоток выведены и подключены к возбуждению постоянного тока через полупроводниковые переключатели в цепи привода.
Ротор состоит из материала с постоянными магнитами, такого как феррит, который может иметь форму цилиндрического или выступающего полюса, но обычно это гладкий цилиндрический. Ротор спроектирован так, чтобы иметь четное количество постоянных магнитных полюсов с чередующимися «+» и «-» полярностями.
Принцип работы шагового двигателя с постоянным магнитом
Этот тип двигателя работает по принципу притяжения полюсов с разным знаком. Когда обмотки статора возбуждаются источником постоянного тока, он создает магнитный поток и устанавливает «+» и «-» полюса. Из-за силы притяжения и отталкивания между полюсами ротора с постоянными магнитами и полюсами статора ротор начинает двигаться в положение соответствующему поданному сигналу на статор.
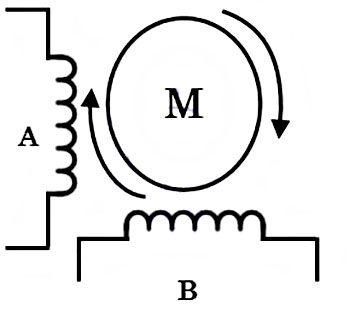
Рассмотрим двухфазный шаговый двигатель с двумя полюсами с постоянным магнитом ротора, как показано на рисунке ниже.
Когда на фазу А подается обратное напряжение по отношению к обмотке А’ устанавливаются «+» и «-» полюса. Благодаря силе притяжения полюса ротора совмещаются с полюсами статора, так что ось магнитного полюса ротора регулируется относительно оси статора, как показано на рисунке.
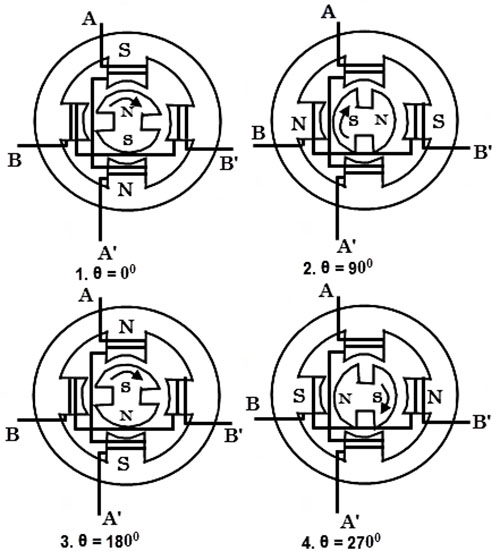
Когда возбуждение переключается на фазу B и выключается фаза A, ротор дополнительно настраивается на магнитную ось фазы B’ и таким образом поворачивается на 90 градусов по часовой стрелке.
Затем, если на фазу A подается отрицательный ток по отношению к A’, образование полюсов статора заставляет ротор двигаться еще на 90 градусов по часовой стрелке. Таким же образом, если фаза B возбуждается отрицательным током при замыкании переключателя фазы A, ротор вращается еще на 90 градусов в том же направлении. Затем, если фаза A возбуждается положительным током, ротор возвращается в исходное положение, совершая полный оборот на 360 градусов. Это подразумевает, что при возбуждении статор, ротор имеет тенденцию вращаться на 90 градусов по часовой стрелке. Угол шага этого 2-фазного 2-полюсного ротора с постоянным магнитом выражается как 360 / (2 х 2) = 90 градусов. Размер шага может быть уменьшен путем одновременного включения двух фаз или последовательности режимов однофазного включения и двухфазного включения с правильной полярностью.
Гибридный шаговый двигатель
Это наиболее популярный тип шагового двигателя, поскольку он обеспечивает лучшую производительность, чем шаговый двигатель с постоянными магнитами, дискретностью шага, удерживающего момента и скорости. Однако эти двигатели стоят дороже. Этот тип сочетает в себе лучшие характеристики шаговых двигателей с переменным сопротивлением и шаговых двигателей с постоянными магнитами. Эти двигатели используются в устройствах, где требуется очень маленький угловой шаг, такой как 1,5, 1,8 и 2,5 градуса.
Конструкция гибридного шагового двигателя
Статор этого двигателя такой же, как у других типов. Катушки статора намотаны на чередующиеся полюса. При этом на каждом полюсе намотаны катушки разных фаз, обычно две катушки на полюсе, который называется бифилярным соединением.
Ротор состоит из постоянного магнита, который намагничен в осевом направлении для создания пары магнитных полюсов ( «+» и «-» полюсов). Каждый полюс покрыт равномерно расположенными зубцами. Зубья состоят из мягкой стали и двух секций, из которых на каждом полюсе смещены друг относительно друга на пол-зубца.
Принцип работы гибридного шагового двигателя
Этот двигатель работает аналогично двигателю с постоянным магнитом. На рисунке выше показан 2-фазный, 4-полюсный, 6-зубчатый роторный гибридный шаговый двигатель. Когда возбуждается фаза A-A’ источником постоянного тока, оставляя B-B’ невозбужденным, ротор выравнивается так, что «+» полюс ротора обращен к «-» полюсу статора, а «+» полюс ротора обращен к «-» полюсу статора.
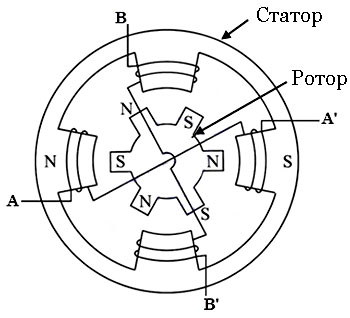
Теперь, если возбуждается фаза B-B’, и если A-A’ отключить таким образом, что верхний полюс станет «+», а нижний «-«, тогда ротор выровняется в новое положение, двигаясь в направлении против часовой стрелки. Если фаза B-B’ возбуждается противоположным образом, так что верхний полюс становится «-«, а нижний «+», тогда ротор поворачивается по часовой стрелке. При правильной последовательности импульсов поданных на обмотки статора, двигатель будет вращаться в нужном направлении. При каждом возбуждении ротор блокируется в новом положении, и даже если возбуждение снимается, двигатель все еще сохраняет свое заблокированное состояние из-за возбуждения от постоянного магнита. Угол шага этого 2-фазного 4-полюсного 6-зубчатого роторного двигателя задан как 360 / (2 х 6) = 30 градусов. На практике гибридные двигатели конструируются с большим количеством полюсов ротора, чтобы получить высокое угловое разрешение.
Униполярные и биполярные шаговые двигатели
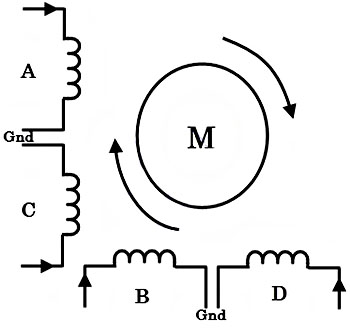
Рассмотренные выше двигатели могут быть однополярными или биполярными на основе устройств обмотки катушки. Однополярный двигатель используется с двумя обмотками на фазу, и, следовательно, направление тока через эти обмотки изменяет вращение двигателя. В этой конфигурации поток тока проходит через одно направление в одной катушке и противоположное направление в другой катушке.
На рисунке ниже показан двухфазный однополярный шаговый двигатель, в котором катушки A и C предназначены для одной фазы, а B и D для другой фазы. В каждой фазе каждая катушка проводит ток в направлении, противоположном направлению другой катушки. Только одна катушка будет проводить ток за раз в каждой фазе для достижения определенного направления вращения. Так что, просто переключая клеммы на каждую катушку, контролируется направление вращения.
В случае биполярного шагового двигателя каждая фаза состоит из одной обмотки, а не двух в случае однополярной. При этом направление вращения контролируется путем изменения направления тока через обмотки. Следовательно, он требует более сложной схемы привода для реверсирования тока.
Шаговые двигатели имеют три основных режима работы:
— полный шаг — за 1 импульс ротор совершает 1 шаг;.
— полушаг — за 1 импульс ротор совершает оборот на ½ шага за 1 такт.
— микрошаг — дробление значений оборотов ротора за 1 импульс на ¼, ⅛ и т.д. шага.
Полный шаг
One phase on full step – одна фаза на полный шаг.
Этот вариант был описан в примерах ранее, он заключается в попеременной коммутации фаз, фазы не перекрываются, в каждый момент времени к источнику напряжения подключена только одна фаза. Точки равновесия ротора совпадают с полюсами статора. Недостатком этого режима является использовании половины обмоток для биполярного двигателя, и лишь четверть для униполярного.
Two-phase-on full step — две фазы на полный шаг.
Этот вариант полношагового режима управления при котором в одно и то же время включены две фазы на полный шаг. Называется – две фазы на полный шаг. При таком способе ротор фиксируется между полюсами статора за счет подачи питания на все обмотки. Это позволяет увеличить крутящий момент двигателя на 40%. Угол шага не меняется, просто ротор в состоянии равновесия смещен на пол шага.
Полушаг
Этот способ позволяет получить в два раза больше шагов на оборот ротора от двигателя. На четных шагах возбуждается одна фаза, а на нечетных — возбуждаются сразу две. В результате такого подключения угловой шаг уменьшается в два раза. При использовании данного варианта приходится мериться с потерей момента. Надо помнить, что для обоих режимов справедливо то, что при остановке двигателя со снятием напряжения со всех фаз, ротор двигателя находится в свободном состоянии и может смещаться от механических воздействий. Для фиксирования положения ротора, необходимо подать на обмотки двигателя ток удержания. Данная возможность позволяет обходиться без механических фиксаторов, тормозных систем и т.п. В полушаговом режиме шаговый двигатель делает два раза больше шагов за оборот. Полушаговый режим обеспечивает более плавное вращение, чем полношаговый, но при переключении между обмотками теряется до 30% крутящий момент.
Микрошаговый
Для получения еще большего числа шагов двигателя применяют микрошаговый режим. Включают две фазы, как на полушаговом режиме, но токи обмоток распределяют не равномерно. Магнитное поле статора смещается между полюсами, смещая и положение ротора. Как правило, разница токов между рабочими фазами происходит с определенной дискретностью, это и называется микрошагом. Микрошаговый режим способен значительно повысить точность позиционирования шагового двигателя. Хотя система управления приводом становится намного сложнее. Этот режим используется в ситуациях, когда требуется высокоточное позиционирование. Как и в случае полушаговой операции, микрошаг повышает точность позиционирования за счет уменьшения крутящего момента.
Преимущества шагового двигателя
— точность позиционирования, погрешность отдельного шага не накапливается с шагами;
— низкая инертность при старте, реверсе и остановке;
— высокая надежность, из-за отсутствия трущихся деталей;
— скорость двигателя прямо пропорциональна частоте входных импульсов, таким образом, может быть достигнут широкий диапазон скорости вращения;
— угол поворота двигателя прямо пропорционален входным сигналам;
— фиксация положения при остановке током удержания;
— шаговые двигатели дешевле по сравнению с серводвигателями.
Недостатки шаговых двигателей:
— сложность системы управления;
— появление резонанса при определенных условиях;